- The paper introduces neural operator predictor-feedback methods that bypass online ODE integration for delay compensation in nonlinear systems using sampled measurements.
- It presents two architectures: one for uniform sampling offering batch inference, and one for nonuniform sampling with increased flexibility but higher sensitivity to approximation error.
- Theoretical stability analysis and numerical tests on a 6-DOF robotic manipulator demonstrate significant computational speedup and robust tracking performance.
Problem Context and Motivation
Nonlinear control systems operating under input delays and sampled, potentially irregular, measurements present profound technical obstacles. While predictor feedback has become the canonical method for delay compensation, classic predictor designs necessitate online integration of implicit ODEs—an operation that is computationally prohibitive without continuous state access and introduces implementation challenges, especially for high-dimensional, stiff, or real-time robotic systems. Notably, such approaches generally presuppose uninterrupted state measurements, which is unrealistic in many modern cyber-physical settings where measurements may be nonuniformly sampled, missing, or corrupted due to sensor limitations and network issues.
Recent advances with neural operator (NO) architectures—e.g., DeepONet [lu2021deeponet] and FNO [li2021fourier]—motivate their use as universal function approximators in control, specifically for efficiently emulating predictor mappings in delay compensation. This paper introduces two neural-operator-based control architectures relevant for sampled measurement settings—circumventing the major obstacles in computational cost and offering a theoretical analysis of robust closed-loop properties as a function of neural operator error.
Neural Operator Predictor-Feedback Architectures
At the core, the paper proposes two sampled-measurement predictor feedback control methods for nonlinear delay systems, both leveraging neural operator surrogates:
- Case 1 (Uniform Sampling): A neural operator M maps the current state measurement and historical inputs to a predicted state trajectory across a fixed sampling horizon, enabling direct delay compensation via the learned operator. This method supports efficient batch inference but requires uniform sampling intervals.
- Case 2 (Bounded, Non-uniform Sampling): The neural operator P approximates only the delay-compensating predictor, providing the initial condition for a continuous-time ODE flow that governs inter-sample evolution. This approach permits flexibility in sampling intervals bounded above, but the propagation step amplifies the sensitivity to neural operator approximation error.
(Figure 1)
Figure 1: Schematic depiction of the hybrid sampled-measurement neural operator predictor feedback systems for uniform and non-uniform sampling schedules.
The diagram emphasizes the duality: direct horizon-prediction via a multi-step neural operator (Case 1) versus hybridization with online ODE integration initialized by a neural operator (Case 2).
Given a nonlinear system with input delay:
X˙(t)=f(X(t),U(t−D)),t∈[0,∞)
the classical predictor feedback relies on implicit ODE integration. The crux of the methodology is recasting this as operator learning—specifically, learning the mapping from the most recent sampled state and recent input history to the predicted future state or state trajectory needed for delay compensation.
Key elements:
- Predictor Operator (P): Given X and a historical input U, maps to the predicted state over the delay window.
- Sample-Horizon Flow Operator (Z): Governs state evolution between samples under the nominal (delay-free) feedback law.
- Multi-Step Prediction Operator (M): Composition of the above, mapping measured state and input history to the entire sampling horizon of predicted states.
These operators are proven to be Lipschitz, and universal approximation theorems for neural operators (notably FNO/DeepONet) guarantee, for fixed compact domains, the existence of arbitrarily accurate neural operator surrogates [lanthaler2024nonlocalitynonlinearityimpliesuniversality].
Stability Guarantees and Error Propagation Analysis
Central to the theoretical contribution is a rigorous closed-loop stability analysis establishing that both neural-operator-based feedback implementations deliver semi-global practical stability. The explicit stability residual is quantized in terms of the neural operator error ϵ, sampling conditions, and system regularity:
- Case 1: The error bound in the closed-loop system scales directly with ϵ; sampling interval must be uniform.
- Case 2: The error bound is amplified by the factor P0, where P1 is the system Lipschitz constant, P2 the feedback law's Lipschitz constant, and P3 the upper bound on the sampling interval. This illustrates the pronounced dependence of robust stability margins on both model and sampling granularity.
Both approaches are robust under measurement noise, irregular sampling, and neural operator model error, as long as these errors remain within the bounds prescribed by the Lyapunov-based analysis.
Empirical Demonstration: High-DOF Robotic Manipulator
The numerical evaluation focuses on a 6-DOF robotic manipulator subject to delayed torque control, exhibiting high-dimensional, nonlinear, and delay-afflicted dynamics. The controller tracks a nontrivial sinusoidal trajectory under significant input delay P4 and measurement noise. Both Case 1 and Case 2 architectures are tested against an accurate numerical predictor feedback baseline.
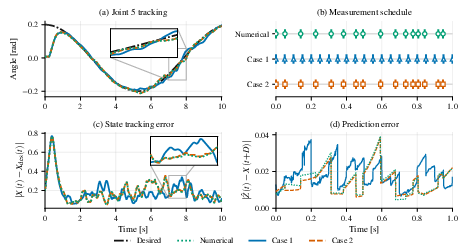
Figure 2: (a) Tracking results for joint 5 under delay. (b) Sampling schedules: Case~1 enforces fixed intervals P5, while Case~2 and the numerical reference use random sampling in P6, all measurements with additive Gaussian noise.
Strong numerical results are observed:
- All methods yield accurate tracking, with the neural operator architectures preserving stability and reference following comparable to the numerical ground truth—even under irregular sampling and noise.
- Computational efficiency is markedly superior for neural operators. GPU-accelerated NO evaluation achieves P7 latency versus P8 for the standard predictor ODE solve (tolerance P9), yielding a X˙(t)=f(X(t),U(t−D)),t∈[0,∞)0 speedup. This makes these architectures particularly attractive for real-time embedded applications.
Implications, Limitations, and Future Directions
The theoretical and empirical advances of the paper elucidate several implications:
- Practical Feasibility: Neural operator predictor surrogates admit real-time, robust compensation for delays in high-dimensional settings where classic direct integration is intractable, even with non-uniform and noisy measurement regimes.
- Model Selection Tradeoff: Choice of architecture is tied to sampling regularity. Uniform sampling is computationally optimal and error-resilient, but non-uniform sampling mandates more accurate NOs to avoid error amplification.
- Universal Applicability: The methodology and guarantees apply to a broad class of nonlinear systems, limited only by the domain on which the neural operator is trained and the underlying dynamics’ regularity.
For future research, several directions are salient:
- Extension to Uncertain or Unknown Delays: Building upon [bhan2025stabilizationnonlinearsystemsunknown], incorporating online adaptation to estimate and compensate unmodeled delay variability.
- Scalability and Representation: Assessing the impact of NO architecture selection (e.g., FNO vs. DeepONet), representation capacity, and sample efficiency for higher-dimensional and more complex systems.
- Safety and Robustness under Deployment: Quantifying and enforcing guarantees when neural operator approximation error cannot be exactly measured online.
- Hardware-in-the-Loop Deployment: Integrating these sampled-measurement-aware architectures into real robotic platforms with sensor/actuator irregularities, lossy networks, and limited computational budgets.
Conclusion
This work presents a mathematically grounded framework for implementing neural-operator-based predictor-feedback in nonlinear, input-delayed systems with sampled measurements (2603.29119). Both proposed designs retain the essential stability and robustness of classic predictor feedback, providing explicit error-dependent guarantees and enabling substantial computational speedup. The theoretical and empirical results substantiate the use of neural operator surrogates as a practical solution for real-time delay compensation in multivariate, nonlinear robotic, and cyber-physical applications.

