- The paper introduces an operator learning framework using both numerical and neural methods to approximate prediction horizons for delay compensation.
- The paper rigorously establishes exponential stability under bounded approximation errors using Lyapunov analysis and small-gain conditions.
- The paper demonstrates significant computational speed-ups with neural operators, enabling real-time control for systems with complex, time-varying delays.
Predictor-Based Output-Feedback Control of Linear Systems with Time-Varying Delays via Neural-Approximated Prediction Horizons
Overview
The paper addresses the implementation and stability analysis of predictor-based output-feedback controllers for finite-dimensional linear systems with time-varying input and measurement delays. The critical difficulty is that, under time-varying delays, computation of the predictor requires inverting a delay operator, which is almost never available in closed form. This work formulates the inverse delay computation as a problem of operator learning, explores numerical and neural operator-based approximation methods, and rigorously establishes exponential stability of the closed-loop system under bounded approximation errors.
System Model and Problem Statement
The class of systems considered is
{Z˙(t)=AZ(t)+BU(t−D1(t)), Y(t)=CZ(t−D2(t)),
where Z(t)∈Rn is the system state, U(t)∈Rm is the control, Y(t)∈Rp is the measured output, and D1, D2 are differentiable and strictly positive, uniformly bounded time-varying delay functions for actuation and sensing respectively.
Ensuring stability in this context is nontrivial: delays destroy the separation principle and their time-variation prevents closed-form predictor realizations. The practical obstacle is the requirement to compute the prediction horizon, i.e., to access the inverse ϕ1−1(t), where ϕ1(t)=t−D1(t).
Control Architecture
The output-feedback predictor-controller is realized in three cascaded stages (Figure 1): observer, state reconstruction, and predictor.
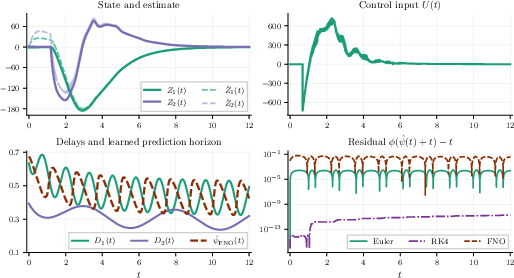
Figure 2: Three-stage observer–predictor feedback law and horizons, depicting the flow of delayed measurements, observer estimation, state reconstruction, and prediction.
- Delayed-Observer: Uses delayed measurements Y(t) to estimate the delayed state Z(ϕ2(t)), yielding Z(t)∈Rn0.
- State Reconstruction: Propagates Z(t)∈Rn1 forward in time using the plant model, producing Z(t)∈Rn2.
- Prediction: Further propagates Z(t)∈Rn3 to the future time Z(t)∈Rn4, yielding Z(t)∈Rn5, and the control input is Z(t)∈Rn6 with Z(t)∈Rn7 such that Z(t)∈Rn8 is Hurwitz.
These steps are interlinked by the necessity to compute or approximate the solution to Z(t)∈Rn9, i.e., the prediction horizon U(t)∈Rm0.
Approximation of the Prediction Horizon
The inverse delay mapping is cast as an operator approximation problem. The inverse operator
U(t)∈Rm1
is shown to be Lipschitz with respect to U(t)∈Rm2 on compact sets. Two approximation strategies are analyzed:
1. Numerical ODE-Based Approximation
The inverse U(t)∈Rm3 satisfies the nonlinear ODE:
U(t)∈Rm4
An explicit Euler discretization is developed, and error bounds are rigorously established in terms of the regularity of U(t)∈Rm5, time horizon length, and ODE step size. The uniform error scales with the time interval and step size, and slow delay variation (small U(t)∈Rm6) leads to smaller errors.
2. Neural Operator Approximation
The paper leverages recent advances in neural operators (e.g., DeepONet, Fourier Neural Operator), which approximate mappings between function spaces. Given the regularity of the inverse delay operator, universal approximation results guarantee for every U(t)∈Rm7 the existence of a neural operator U(t)∈Rm8 such that
U(t)∈Rm9
for compact families Y(t)∈Rp0 of admissible delays. This shifts the bulk of computation offline, and evaluation online reduces to a fast neural inference.
Exponential Stability Analysis
Global exponential stability of the closed-loop system is established under both exact and approximate computation of Y(t)∈Rp1. The main result asserts that if the predictor horizon approximation error remains below a threshold Y(t)∈Rp2 uniform in time, then exponential stability with margin Y(t)∈Rp3 is preserved:
Y(t)∈Rp4
where the Lyapunov functional Y(t)∈Rp5 measures the state, state estimation, and control history energy. The analysis is performed by transforming the system into a backstepping PDE-ODE target form, tracking how horizon approximation errors propagate to boundary terms, and quantifying their effect on Lyapunov decay via small-gain arguments. Sufficient conditions on Y(t)∈Rp6 in terms of controller/observer gains and delay bounds are derived. The performance penalty from approximation manifests as a degradation in the exponential rate.
Importantly, the analysis decouples the stability margin from the internal structure of the approximator (numerical or neural), requiring only a uniform-in-time error bound.
Numerical Experiments
The efficacy of both approximation approaches is validated on an unstable linear system with oscillatory, time-varying, non-analytic delays. A Fourier Neural Operator (FNO) is trained offline on a range of plausible delay profiles to learn Y(t)∈Rp7.
(Figure 1)
Figure 1: Example feedback control response with FNO-approximated prediction horizon. Observer and plant states converge, demonstrating closed-loop stabilization for time-varying delays.
Key results:
- Controller Performance: The neural operator-based predictor yields rapid stabilization even with delays never seen during training, matching the accuracy of ODE-based schemes.
- Computation Time: Evaluation of FNO is Y(t)∈Rp8 faster than Euler and Y(t)∈Rp9 faster than Runge-Kutta on a GPU, but with minor loss in consistency error.
- Trade-off: Neural operator is preferable for real-time, high-rate control when approximation accuracy is within the admissible threshold for closed-loop stability.
Theoretical and Practical Implications
Theoretically, the paper provides an operator-theoretic unification of numerical and learning-based predictor approximation, with general stability guarantees under bounded horizon errors. The framework admits analysis of black-box approximators as long as they fall within the Lyapunov margin, supporting robust digital implementation for time-varying delay compensation.
Practically, the neural operator approach removes the need for online nonlinear equation solving, allowing real-time compensation for systems with complex, time-varying, and even data-driven delay models. The methodology is extendable to higher-order, distributed, and infinite-dimensional systems as the neural operator gains expressivity.
The operator-learning viewpoint—demonstrated here for delay inversion—parallels recent results in neural-approximated PDE backstepping control, adaptation, and robust stabilization for infinite-dimensional and nonlinear systems (Lanthaler et al., 2023, Li et al., 2020), [10374221], [BHAN2025105968], [LV2025112553], [ZHANG2026112809].
Future Directions
The operator-based stability envelope provides a foundation for:
- Extending predictor-feedback to nonlinear, adaptive, or stochastic systems with delays via neural operator surrogacy (Bhan et al., 30 Sep 2025).
- Investigating the effect of neural network architecture choices, generalization, and discretization error in control-theoretic contexts (Lanthaler et al., 2024).
- Integration with modern networked control systems where delays are learned or estimated online.
Conclusion
This work rigorously demonstrates that predictor-based output-feedback control for linear systems subject to time-varying delays can be rendered implementable and robust using either adaptive step ODE solvers or neural operator surrogates for the required inverse delay mapping. Both approaches are shown to yield arbitrary accuracy over finite horizons; closed-loop exponential stability is proved up to an explicit robustness margin. The neural operator solution, benefiting from offline training, enables real-time delay compensation even with high computational restrictions and out-of-model delay profiles, marking a significant advancement for practical implementation of delay-compensating controllers.
Reference: "Predictor-Based Output-Feedback Control of Linear Systems with Time-Varying Input and Measurement Delays via Neural-Approximated Prediction Horizons" (2603.29117)

