- The paper introduces a closed-form predictive control law that minimizes implement tracking error by anticipating curvature transitions and sideslip effects.
- It extends classical kinematic models to include implement offsets and lever-arm effects, validated through detailed simulations and field experiments.
- The approach achieves significant performance gains, including up to 70% reduction in peak transient errors compared to reactive controllers.
Predictive Offset-Point Path Tracking for Agricultural Robots: Model-Based Control of Rigid Implements
Introduction and Problem Motivation
The integration of autonomous robotics in agricultural operations is transforming precision farming, where stringent accuracy demands exist not only at the vehicle chassis but, crucially, at the point of tool–soil interaction. Conventional path-following controllers, typically formulated at the center of an Ackermann-steered robot, fail to account for the geometric and dynamic footprint of rigid implements (e.g., weeders, cultivators), whose interaction point with the environment is often displaced from the robot’s reference point. This spatial misalignment, exacerbated by lever-arm effects and slip phenomena, can induce substantial tracking error at the implement, leading to crop damage, inefficiency, and reduced safety.

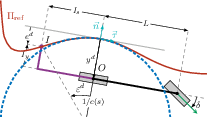
Figure 1: An autonomous agricultural system with a rigidly mounted implement highlights that accurate control is required at the soil–implement contact point rather than at the vehicle center.
The paper "A Predictive Control Strategy to Offset-Point Tracking for Agricultural Mobile Robots" (2603.28439) directly tackles this challenge, presenting a model-predictive closed-form controller explicitly designed for offset-point tracking under realistic sliding conditions, applicable to both front- and rear-mounted rigid implements. This work systematically extends classical kinematic models, explicitly incorporates sideslip estimation, and provides a convergent predictive planning scheme for tracking the implement path, achieving substantial improvements over established geometric and model-based path tracking methods.
Offset-Point Modeling for Agricultural Robots
Agricultural field robots are generally modeled using kinematic bicycle or Ackermann steering models. In this paper, the control objective shifts from the robot’s geometric center to an arbitrary rigidly attached implement point I (Figure 2), defined by offsets (Is,Iy) in the vehicle-fixed frame. The models are extended to include:
- Sideslip at the front and rear axles: Represented via βF, βR, these account for lateral tire slip due to soft soil and implements dragging rearward.
- The lever-arm effect: The offset of the implement generates nonlinearities in the tracking error evolution, particularly during curvature transitions.
- Reference path infeasibility: The same waypoint-based path may not be exactly feasible for all implements; minimization (rather than elimination) of tracking error becomes the objective.
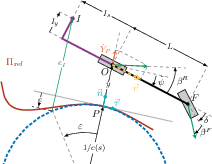
Figure 2: Schematic notation defining the robot, its control point O, implement point I, and error coordinates relative to the reference path Πref.
The core tracking error eI and its evolution (derived and approximated to exclude high-order curvature terms, justified for practical radii in agriculture) are analytically characterized. A sideslip observer, as per [sideslipRoland], ensures real-time estimation of slip disturbances for online control.
Predictive Control Architecture
The design proceeds from classical approaches:
The core innovation in this paper is the derivation of a closed-form predictive control law: the desired angular deviation ψ~dh is determined by minimizing the sum-of-squares deviation of the predicted implement tracking error eIk from an exponentially convergent reference profile (Is,Iy)0 over a preview horizon. This predictive step, which remains analytically invertible (in contrast to traditional numerical MPC schemes), enables the anticipative correction of tracking errors driven by curvature discontinuities and sideslip. Critically, it extends naturally to both front and rear rigid implements, in contrast to MPC-based schemes that only accommodate front-attached tools.
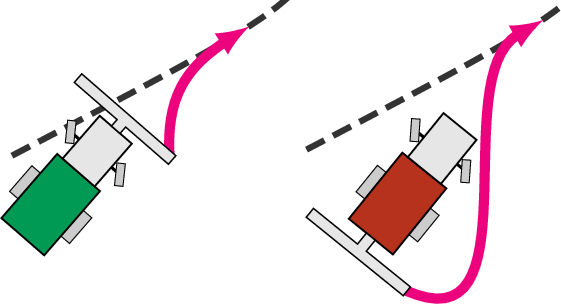
Figure 4: In front-implement configurations, the error decays exponentially. For rear-mounted implements, initial divergence can be required before convergence due to the lever-arm effect.
Simulation Studies
The controller is evaluated in high-fidelity simulations encompassing representative trajectories with varying curvature, implement spatial offsets, and a parameterized tire slip model (using Pacejka coefficients typical for wet agricultural soil). Key results include:
- Velocity robustness: Tracking error remains below (Is,Iy)1 (median) for vehicle speeds between 0.25 and 2.0 m/s, with only a modest increase in error and optimal preview horizon, provided appropriate horizon selection.
- Offset dependence: Front-mounted implements exhibit lower tracking error and variance compared to rear-mounted configurations due to inherently more feasible convergence dynamics; rear implement placement amplifies transient errors during path transitions.
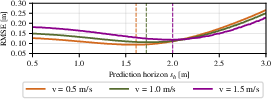
Figure 5: Root mean square tracking error versus prediction horizon for different speeds: optimal performance is not highly sensitive to horizon selection.
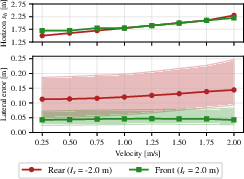
Figure 6: Median and interquartile error as a function of vehicle speed for selected implement placements, revealing rear-mounted implements yield higher transient error.
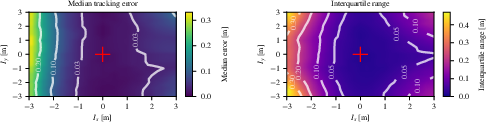
Figure 7: Error colormaps as a function of longitudinal and lateral implement offset: large rear offsets significantly increase median error and interquartile range.
Experimental Validation
Experiments are conducted on an Ackermann robot platform with dual RTK-GNSS and IMU for state feedback, with both a weeder and spring tine cultivator, including both tool-raised and tool-engaged (soil-contact) scenarios.
- Reference trajectories: Multiple path geometries were tested, including straight, arc, and composite paths with sharp transitions and obstacle-avoidance deviations.
- Implementation: Full-state feedback is performed in ROS; sliding observers run real-time for sideslip estimation; control and observer gains are initialized from simulation and fine-tuned empirically.

Figure 8: The experimental robot platform with rear-mounted rigid agricultural implement and dual GNSS localization.

Figure 9: System pipeline: onboard localization, error computation, sideslip estimation, and control input computation.
The predictive controller is benchmarked against:
Empirical results confirm superior tracking performance:
- For front implements, median tracking error is reduced from (Is,Iy)2 (backstepping) to (Is,Iy)3 (predictive), with interquartile range halved.
- Peak transient errors during curvature transitions are reduced by factors up to 70%.
- For physically infeasible paths (e.g., obstacle avoidance with rear implement), only the predictive controller converges without divergence.
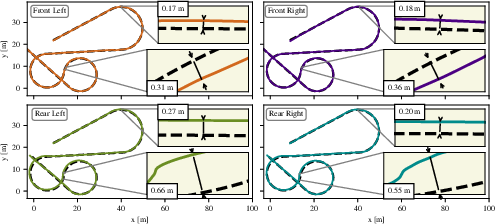
Figure 11: Actual implement trajectories for all canonical spatial placements. Rear implements show largest transients at abrupt path transitions.
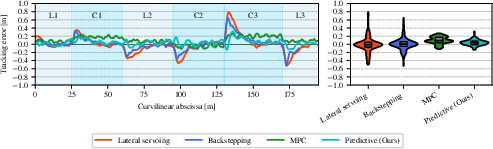
Figure 12: Comparison of tracking error profiles for all controllers. Predictive controller outperforms reactive methods, especially during transient phases.
Agricultural Scenario: Real-World Robustness
Robustness to unknown slip and real soil/contact disturbances is demonstrated using a weeder and a spring tine cultivator, both requiring stringent offset tracking. The predictive controller achieves:
- Sustained median error reductions: 24–56% improvement over baselines.
- Transients during obstacle avoidance: Peak error cuts of 55–70% relative to reactive controllers, which often exceed (Is,Iy)4 error in sharp deviations.
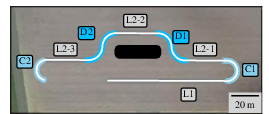
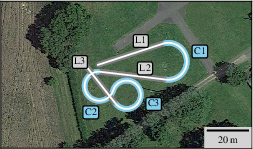
Figure 13: Field reference path with mixed straights, U-turns, and obstacle avoidance deviations.
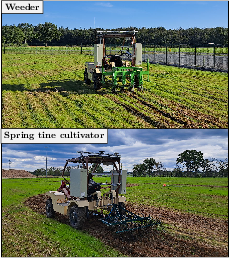
Figure 14: Two implements used in tests: a surface weeder and a deep working spring tine cultivator, the latter inducing larger offset tracking disturbances.
Discussion and Implications
This work advances the state-of-the-art in agricultural mobile robot control by providing a closed-form predictive controller, explicitly modeling lateral slip and implement offset, validated in both simulation and field conditions. It avoids the computational burden and numerical failures of numerical-solver-based MPC, while retaining anticipative capabilities crucial for high-precision agriculture. Importantly, the approach is inherently agnostic to implement placement (front or rear), covers both low- and moderate-curvature paths, and subsumes reactive methods as special cases. The role of real-time slip estimation is highlighted as indispensable: ablation shows error reductions up to 64% during curved motion due to observer-based corrections.
Practical implications include improved safety (by minimizing implement overrun into crop rows), reduced crop damage, and enhanced path feasibility in variably equipped robots. Theoretically, the model establishes analytical error dynamics and sufficiency conditions on curvature, opening avenues for extension to skid-steer platforms, multi-actuator (active) implements, and joint optimization of energy or smoothness objectives.
Conclusion
The proposed predictive offset-point control framework materially advances implement-level path tracking accuracy for agricultural field robots under realistic operational constraints. By combining analytical anticipation of curvature transitions with real-time slip estimation, it achieves strong, repeatable reductions in error versus geometric and reactive state-of-the-art methods, with performance validated under demanding implement and environmental configurations (2603.28439). Future lines of inquiry include extension to non-rigid, actively actuated implements and high-curvature or unstructured environments where nonholonomic constraints may be further relaxed.