Minimal noise in non-quantized gravity
Abstract: An elementary prediction of the quantization of the gravitational field is that the Newtonian interaction can entangle pairs of massive objects. Conversely, in models of gravity in which the field is not quantized, the gravitational interaction necessarily comes with some level of noise, i.e., non-reversibility. Here, we give a systematic classification of all possible such models consistent with the basic requirements that the non-relativistic limit is Galilean invariant and reproduces the Newtonian interaction on average. We demonstrate that for any such model to be non-entangling, a quantifiable, minimal amount of noise must be injected into any experimental system. Thus, measuring gravitating systems at noise levels below this threshold would be equivalent to demonstrating that Newtonian gravity is entangling. As concrete examples, we analyze our general predictions in a number of experimental setups, and test it on the classical-quantum gravity models of Oppenheim et al., as well as on a recent model of Newtonian gravity as an entropic force.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper asks a simple but deep question: Is gravity “quantum” (made of tiny packets called gravitons that can create quantum links between objects), or is it something else? The authors show that if gravity is not quantum, then it must jitter things around a tiny bit—it must add a minimum amount of unavoidable noise. That gives experiments a clear target: if we ever measure less noise than that minimum, it would mean gravity really does act quantumly by creating entanglement.
Think of it like this: if gravity can’t tie two objects together with a quantum link, it pays a price by shaking them ever so slightly. If we don’t see that shake, the quantum link must be real.
What big questions are they asking?
- Can models of gravity that are not quantum still match everyday gravity (like planets orbiting) and also match the rules of motion we use for slow-moving objects?
- If gravity is not quantum, how much “extra noise” must it add to objects it pulls on?
- Can we design experiments to tell the difference by measuring this noise?
- Do popular non-quantum ideas for gravity (like “classical-quantum” gravity or “entropic” gravity) survive these tests?
How did they study it? (Simple explanation)
The authors built a very general “rulebook” for how masses move under gravity that:
- Keeps Newton’s law right on average (so planets still orbit correctly).
- Is “time-local” (what happens now depends only on now, not on some memory of the distant past).
- Works the same in different frames moving at constant speed (Galilean symmetry—think “the laws don’t change if you’re on a smooth-moving train”).
Using these mild assumptions, they wrote the most general possible equation for how a system evolves when it can both move normally and also experience some noise. In everyday terms:
- The normal part is the usual gravitational pull.
- The noise part has two flavors: 1) Local noise affecting each mass individually (like each object’s position gets slightly blurred). 2) Shared noise that affects both masses in a coordinated way (like both feel the same tiny random tug).
They then tested this rulebook on realistic experimental setups you can picture:
- Two tiny mechanical pendulums/oscillators close together.
- Two small masses each in a superposition of being in a left or right spot (think “two coins in heads+tails superposition”).
- A hybrid—one heavy mass and a quantum two-state system (like an atom interferometer near a source mass).
Finally, they plugged specific non-quantum gravity ideas into their rulebook to see what noise levels those ideas predict and whether current or future experiments can check them.
What did they find, and why is it important?
Here are the main takeaways:
- If gravity does not create entanglement, it must introduce a minimum amount of noise. This is not an opinion—it falls out of the most general, symmetry-respecting way you can write the physics.
- That minimum noise creates clear experimental targets. For example, for two small masses about 1 mm apart, a non-quantum gravity model must add at least a certain tiny “acceleration noise.” If experiments measure less than that, gravity must be entangling (i.e., quantum in this sense).
- The target numbers are very small, but not impossibly small. As a rough feel:
- Two mechanical oscillators 1 mm apart would need to see acceleration noise below about 10-18 m/s² per √Hz to force the conclusion that gravity is entangling. That’s roughly 1000 times more sensitive than a recent space mission (LISA Pathfinder), which is hard but not unimaginable for the future.
- For “two-position” masses (left/right superpositions), the paper gives similar “noise must be below X” targets using parameters from proposed experiments. If the noise is smaller than the bound, entanglement must be happening.
- For a hybrid setup (a heavy source mass and a two-state system like certain atom interferometers), the allowed noise is even smaller because atoms are so light—this sets a very challenging, but clean, goal.
- Shared (correlated) noise can soften how much local noise ruins entanglement, but it can’t produce entanglement by itself. In other words, shared shaking can help, but it can’t fake a real quantum link.
- This framework is more complete than some earlier approaches because it doesn’t assume everything is “Gaussian” (a special kind of neat, bell-shaped noise). Some realistic models produce non-Gaussian behavior, especially for single objects, and the authors’ method captures that.
- When they test specific non-quantum models:
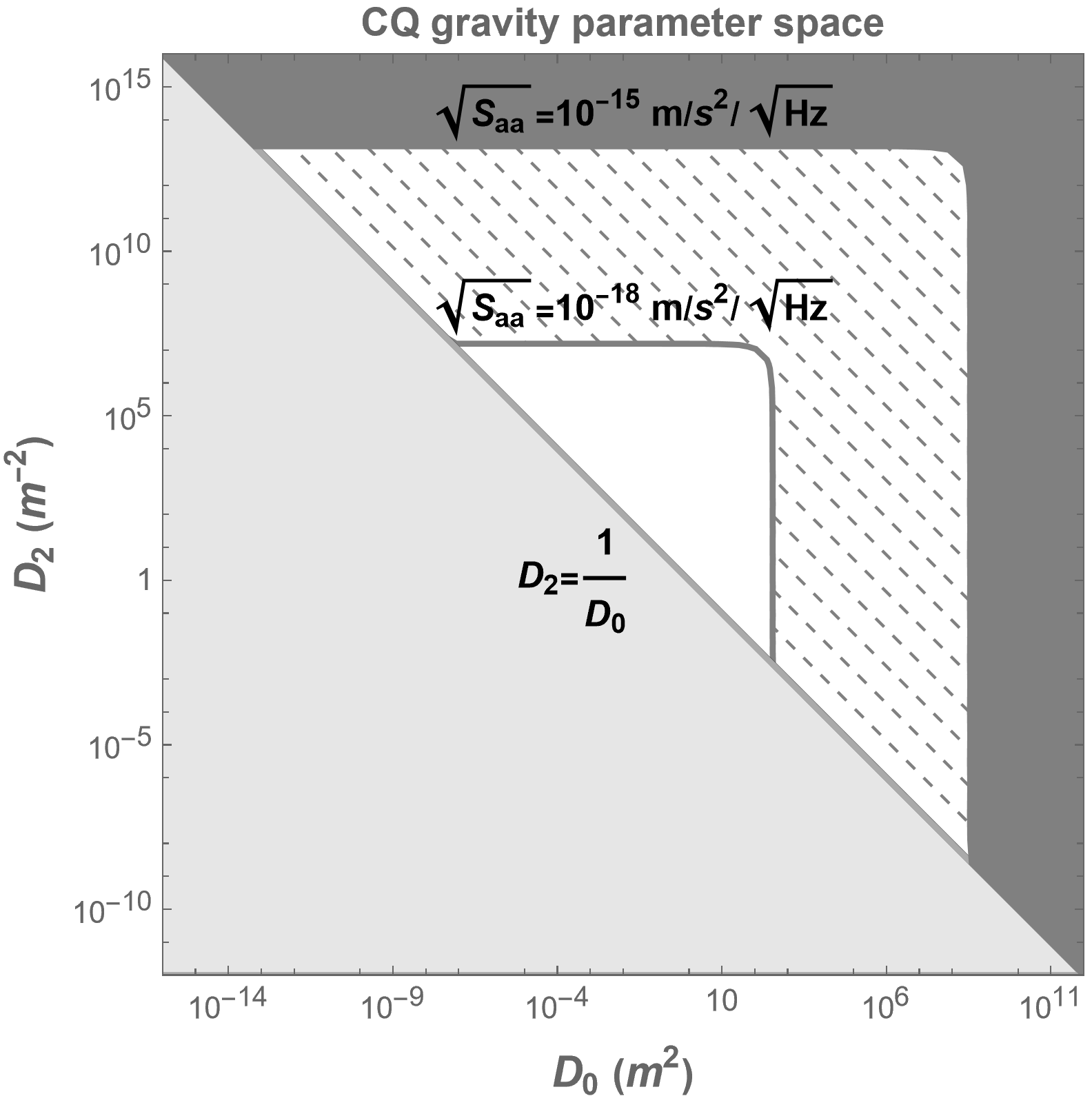
- “Classical–quantum” (CQ) gravity: This model replaces the quantum gravitational field with a cleverly constructed classical-but-random one. The authors show CQ gravity must produce at least a certain amount of noise (due to an internal trade-off in the model). Some parts of its parameter space are already ruled out by existing noise measurements, and future measurements hitting the new noise targets could rule out much more—or even the whole model.
- “Entropic” gravity (gravity as a thermodynamic or “information” effect): They analyze concrete toy versions that mimic Newtonian gravity using a thermal environment. These naturally predict small extra fluctuations (noise). Their framework quantifies these and shows how experiments could test them.
Why this matters:
- It gives a practical, step-by-step way for experiments to answer “Is gravity quantum?” without first having to directly observe gravitational entanglement. Watching for less noise than the “must-have” minimum is enough.
- As measurements improve, they don’t just produce a yes/no answer—they continuously squeeze and rule out entire families of non-quantum gravity ideas.
How to picture the key ideas
- Entanglement: Imagine two fair coins that are linked so that if one lands heads, the other must land tails—even if they’re far apart. That strange link is entanglement. Gravity that is truly quantum can create links like that between masses.
- Noise: Think of trying to photograph a tiny object with a long exposure while your hand shakes a little. The blur is “noise.” In physics experiments, noise makes quantum effects harder to see. If gravity can’t entangle, the theory says the “handshake” blur must be there at some minimum level.
- The test: Either we see the blur (noise) at or above the predicted minimum, or we beat that minimum—forcing the conclusion that gravity is producing entanglement.
What could this change?
- It gives experimentalists a concrete set of noise thresholds to aim for. If they beat them, that’s strong evidence gravity is quantum in the “it can entangle” sense.
- It narrows down (or rules out) whole classes of non-quantum gravity models as measurements get better, even before anyone directly observes gravitational entanglement.
- It suggests that directly seeing gravitational entanglement and beating the noise thresholds are “equally hard” in a deep way—so both paths are valuable and complementary.
In short: This paper turns a big philosophical question—“Is gravity quantum?”—into a testable plan. It shows that if gravity isn’t quantum, it has to be noisy in a specific, minimal way. Measure less noise than that, and you’ve caught gravity acting quantum.
Knowledge Gaps
Below is a single, consolidated list of concrete knowledge gaps, limitations, and open questions that the paper leaves unresolved. These items are intended to guide future theoretical development and experimental tests.
- Relativistic extension: The framework is entirely non-relativistic and Galilean invariant; it remains open how to extend the classification and noise bounds to a fully relativistic (Lorentz-invariant) setting and to verify that realistic relativistic models reduce to the proposed Lindblad form in the appropriate limit.
- Time-locality assumption: The master equation assumes Markovian, time-local evolution; explicit characterization of how non-Markovian memory effects (e.g., in classical-quantum models) modify noise–entanglement tradeoffs and thresholds is not provided.
- Position-only dissipators: The analysis restricts to Lindblad operators that depend on positions only; the impact of momentum-dependent or mixed position–momentum dissipators on both noise rates and entanglement generation criteria is left unexplored.
- Completeness of the two-body dissipator: The simplified dissipator uses a single non-local double-commutator term proportional to β; whether this exhausts all Galilean-invariant, completely positive two-body dissipative structures (and their constraints) has not been fully classified.
- Constraints on β and correlated noise: Beyond the positivity inequality quoted in an appendix, there is no systematic, model-independent characterization of the admissible domain of β relative to the single-body rates Γa; the extent to which correlated noise can relax entanglement thresholds without enabling classical entanglement “simulation” is not fully analyzed.
- Generality of the Jk,i(r) parametrization: While the paper identifies a general form for two-body Lindblad operators, explicit physical constraints on the functions Jk,i(r) (e.g., from stability, energy conservation, or microscopic realizability) are not derived, leaving a large and potentially unphysical function space.
- Beyond small-displacement expansion: Many bounds rely on a small relative-displacement (|r|/d ≪ 1) expansion; the behavior and possible deviations in regimes where this expansion fails (e.g., large-amplitude motion or very small separations) are not quantified.
- Long-time dynamics: Entanglement/noise comparisons are made using short-time (t → 0) derivatives; possible qualitative changes at longer times (e.g., steady-state behavior, revival, or resonance effects) remain unaddressed.
- Entanglement witnesses for non-Gaussian dynamics: For oscillators, the entanglement criterion used is exact for Gaussian states but only a sufficient witness for non-Gaussian dynamics; a necessary-and-sufficient (or tighter) criterion applicable to the non-Gaussian single-body noise considered here is lacking.
- Multi-mass generalization: The treatment focuses on pairs of masses; the structure of dissipation and correlated noise in networks or arrays of masses, and the scaling of entanglement/noise thresholds in many-body settings, is not developed.
- Mixed internal structure and extended bodies: Masses are effectively treated as point-like (modulo an ad hoc cutoff); how internal structure, spatial extent, and multipole moments modify both H and the dissipator, including β and f_a(k), remains to be worked out.
- Experimental separability of noise sources: The “excess” noise definition presumes accurate subtraction of Hamiltonian dynamics; concrete protocols to robustly separate gravitationally-induced noise from dominant technical and environmental noise (and measurement back-action) are not provided.
- Optimal measurement strategies for β: Practical methods to detect and bound correlated gravitational noise (β) via cross-correlations or joint readout, and to distinguish it from classical correlated noise sources, are not developed.
- Scaling/optimization across platforms: The paper provides benchmarks but no systematic optimization over mass, distance, frequency, or geometry to minimize required sensitivities while maximizing discrimination power between models.
- Graviton emission and quantum back-reaction: Small irreversibility from graviton emission in quantized gravity is asserted to be negligible, but no quantitative bound is provided to ensure it is below the proposed experimental thresholds in all relevant regimes.
- Curved backgrounds and external gravitational fields: The framework assumes flat-space Newtonian gravity; how background curvature, gradients, or time-dependent tidal fields affect the dissipator and thresholds is not analyzed.
- Inverse identification problem: Given experimental constraints on (f_a(k), β), there is no procedure to reconstruct or discriminate underlying microphysical models (e.g., CQ vs. entropic vs. measurement-feedback), nor a uniqueness analysis of such inversion.
- CQ gravity renormalization and cutoff dependence: Predictions in CQ gravity depend sensitively on an ultraviolet length scale ℓ; a principled renormalization or regularization scheme (and its physical determination for extended/composite bodies) is not established, making noise predictions model- and device-dependent.
- Robustness of CQ tradeoff under regulators: It is not shown whether the decoherence–diffusion tradeoff D0 D2 ≥ 1 and the implied minimal noise bound are regulator- and cutoff-independent in the non-relativistic, composite-body case.
- Definitive (non-)entangling nature of CQ: While the paper assumes CQ is non-entangling for interpretation, a general, rigorous proof (or a clear set of conditions under which CQ can or cannot generate entanglement) is not provided, despite noted controversy.
- Entropic gravity model completeness: For entropic models, only a specific toy, non-local realization is analyzed to leading order; the generality (including local mediator versions), temperature/spectrum dependence of noise, and full expressions for f_a(k) and β are not comprehensively derived.
- Fluctuation–dissipation consistency: The connection (or lack thereof) between the dissipator coefficients (f_a(k), β) and fluctuation–dissipation relations at finite temperature (especially in entropic models) is not established, leaving energy-balance and thermodynamic consistency unclear.
- Beyond-qubit superpositions: In two-state (|L⟩,|R⟩) analyses, the impact of finite wavepacket size, partial overlap, and leakage outside the two-state subspace on both noise rates and entanglement generation is not quantified.
- Robustness to geometry and mass distribution: The dependence of thresholds and minimal noise on specific geometries (e.g., torsion pendula, levitated spheres, elongated masses) and on mass inhomogeneities is not systematically explored.
- Benchmark feasibility and integration times: The paper cites headline noise thresholds (e.g., ~10−18 m/s2/√Hz) but does not map them onto realistic integration times, bandwidths, or systematic-error budgets required to reach decisive gravitational-noise limits.
Practical Applications
Immediate Applications
The paper provides model-agnostic noise thresholds and a unified Lindblad framework that experimentalists and technologists can use now to design, analyze, and interpret precision measurements probing whether gravity is entangling. The following applications can be deployed immediately:
- Target-setting for precision sensors and experiments (academia, space, instrumentation)
- Use the derived entanglement-to-noise thresholds to translate experimental geometry and mass choices into concrete sensor requirements:
- Mechanical–mechanical: “excess” force-noise spectral density threshold ; equivalent acceleration noise .
- Two-state masses (e.g., levitated particles in spatial superposition): to ensure entanglement.
- Hybrid atom–mechanical systems: as a conservative entangling bound.
- Sectors: laboratory optomechanics, torsion balances, MEMS/NEMS, atom interferometry, satellite inertial sensors.
- Dependencies/assumptions: non-relativistic regime; known separation and masses ; “excess noise” is computed by subtracting Hamiltonian-only predictions; backgrounds (electrostatic, magnetic, thermal, seismic) must be quantified and subtracted.
- Reanalysis of existing datasets to constrain alternative gravity models (academia, space)
- Apply the framework to flight data (e.g., LISA Pathfinder) and ground-based accelerometer/optomechanical data to bound the parameter spaces of non-quantized models such as classical–quantum (CQ) gravity.
- Example: map observed acceleration noise to constraints on CQ parameters using (with object size ) and the model’s trade-off .
- Sector: space agencies, metrology labs.
- Dependencies: model-specific cutoffs (e.g., ) and geometry; rigorous background budgets.
- Data-analysis workflow for “excess” gravitational noise (academia, industry)
- Standardize analysis to extract excess noise rates that can be compared to entanglement thresholds:
- Mechanical: compute (force-noise spectral density) and normalized rates .
- Two-state: measure Ramsey contrast loss ; sum over subsystems for .
- Hybrid: combine both in a single metric .
- Integrate model-agnostic observables (covariance matrices, partial-transpose criteria/negativity) into pipelines.
- Sectors: quantum sensing companies, academic groups.
- Dependencies: accurate Hamiltonian modeling for subtraction; calibration of readout chains and transfer functions.
- Open-source simulation libraries and design tools (software, academia, industry)
- Implement the paper’s general Lindblad master equations for design and sensitivity forecasting:
- Model-agnostic kernels (single-body), (correlated noise), and -dependent unitary terms.
- Plug-ins for specific models (CQ, measurement–feedback, Penrose–Diósi, entropic models).
- Modules to produce parameter-exclusion plots (e.g., CQ scans) as instruments improve.
- Sector: scientific software, lab automation.
- Dependencies: validated numerical solvers for non-Gaussian, position-space Lindbladians; community governance for standards.
- Experimental protocol blueprints aligned to theory metrics (academia, quantum instrumentation)
- Mechanical–mechanical: single-oscillator noise measurement (no correlated readout required) with geometry chosen to maximize while minimizing non-gravitational couplings.
- Two-state masses: Ramsey sequences to track dephasing rates ; superposition separations chosen to balance entangling signal and decoherence.
- Hybrid atom–mechanical: synchronized Ramsey and mechanical readouts; cross-check with partial transpose tests.
- Dependencies: charge control, magnetic/electrostatic shielding, cryogenics, ultra-high vacuum, low-vibration platforms.
- Geometry and materials selection guidelines (instrumentation, materials)
- Design choices that relax sensitivity requirements:
- Maximize (larger masses, smaller separations with careful control of systematics).
- High-density, low-loss materials; mass shapes minimizing Casimir/patch forces; low-dielectric coatings.
- Sector: precision manufacturing, materials R&D.
- Dependencies: compliance with thermal noise budgets, mechanical , surface cleanliness.
- Reporting and standards for gravitational-noise limits (journals, collaborations, metrology)
- Adopt common reporting of:
- Excess noise spectra and with geometry .
- Entanglement-threshold comparisons and explicit background budgets.
- Model-parameter constraints (e.g., CQ regions) alongside raw performance metrics.
- Sector: standards bodies, journals, large collaborations.
- Dependencies: community consensus on definitions; traceable calibrations.
- Education and training modules (education)
- Advanced lab curricula illustrating:
- Open quantum systems and Lindblad dynamics.
- Entanglement criteria (partial transpose/negativity) tied to real sensor data.
- Non-Gaussian single-body decoherence and correlated noise effects.
- Sector: universities, graduate programs.
- Dependencies: accessible optomechanical/atomic platforms for instruction.
Long-Term Applications
Several impactful applications require further research, scaling, or new infrastructure before deployment:
- Direct demonstration of gravitational entanglement (academia, quantum tech)
- Execute experiments surpassing minimal noise thresholds to unambiguously show entangling Newtonian interactions.
- Products/technologies: ultra-low-noise optomechanical platforms, macroscopic superposition sources, high-fidelity correlated-noise engineering.
- Dependencies: acceleration sensitivities near at with mg–g masses; extreme environmental control (cryogenic UHV, charge neutralization, magnetic quietness), long coherence times.
- Next-generation spaceborne inertial sensors and missions (space industry, policy)
- Design drag-free satellites and payloads improving on LISA Pathfinder by ~ in acceleration noise to probe non-quantized gravity noise below entanglement thresholds.
- Workflows: mission requirements derived from ; on-orbit background modeling; cross-validation with ground tests.
- Dependencies: micro-Newton thrusters, thermomechanical stability, radiation shielding, long-duration stability; funding and agency prioritization.
- Hybrid atom–mechanical entanglement and constraints (quantum sensing)
- Realize entanglement between atoms (two-state) and macroscopic masses; constrain or falsify models with tiny predicted bounds (e.g., scales in exemplar benchmarks).
- Dependencies: large atomic superpositions near gram-scale sources; suppression of Newtonian background uncertainties; improved trap/laser stability and coherence.
- Full validation/falsification of alternative gravity models (theory–experiment convergence)
- Use staged noise limits and entanglement tests to eliminate parameter space of CQ, measurement–feedback, Penrose–Diósi, and entropic models.
- Policy impact: informed funding and roadmapping for quantum gravity experiments.
- Dependencies: theoretical advances (e.g., renormalization/UV completion of CQ; handling nonlocal couplings), interoperable datasets, multi-platform replication.
- Correlated noise tomography and β-term metrology (academia, instrumentation)
- Develop multi-detector arrays and analysis to resolve correlated gravitational noise (β) versus single-body channels, improving entanglement/noise trade-off assessments.
- Tools: synchronized readouts, cross-correlation estimators, networked oscillators/atoms.
- Dependencies: sub-femtonewton cross-sensor correlation stability; calibration protocols for residual common-mode backgrounds.
- Materials and device breakthroughs for extreme low-noise operation (materials, robotics, aerospace)
- High-Q, cryogenic mg–g resonators; low-loss suspensions; superconducting shielded environments; advanced surface treatments to suppress patch/Casimir forces.
- Spin-offs: next-generation inertial sensors for navigation, geodesy, and robotics with improved bias stability and noise floors.
- Dependencies: manufacturability, scaling to field conditions, robust packaging against environmental disturbances.
- Software ecosystems and digital twins (software, lab automation)
- End-to-end toolchains implementing non-Gaussian Lindblad dynamics, experiment control, and ML-aided background subtraction; digital twins for design and risk mitigation.
- Dependencies: validated models for non-Markovian corrections (when relevant), standardized interfaces with lab hardware, community benchmarks.
- Metrology standards and reproducibility frameworks (policy, standards bodies)
- Establish best-practice standards for gravitational noise reporting, entanglement-claim criteria, and inter-lab comparison protocols.
- Dependencies: inter-consortium collaboration, certification of calibration methods, traceability to SI units.
- Broader technology transfer (industry, daily-life downstream)
- As ultra-low-noise techniques mature, improved commercial accelerometers/gyroscopes and quantum sensors may trickle down to aerospace, civil engineering, and medical navigation.
- Dependencies: translating cryogenic/vacuum performance to ambient conditions; cost and ruggedness optimization.
Cross-cutting assumptions and dependencies
- Physical regime and modeling
- Non-relativistic, Galilean-invariant, time-local dynamics; tests apply where those approximations hold.
- Excess noise is gravitationally induced; experimental noise sources must be independently modeled and subtracted.
- For two-body expansions, small fluctuations relative to baseline separation (); single-body noise may be non-Gaussian and must not be forced into quadratic approximations.
- Model-specific
- CQ gravity: parameter trade-off ; dependence on an ultraviolet cutoff (often approximated by object size); theoretical renormalization not yet settled.
- Entropic models: mediator details and coupling non-locality set noise structure; predictions may depend on mediator temperature and implementation.
- Experimental systematics
- Control of electromagnetic patch potentials, charge, magnetic impurities; thermal gradients; seismic and acoustic coupling; laser and readout noise.
- Precise knowledge of geometry (masses, separations) and material properties (density, loss tangent, surface potentials).
These applications collectively provide a practical roadmap: near-term efforts can standardize analysis and immediately tighten bounds on non-quantized gravity using existing data and instruments, while long-term investments aim at the sensitivity and control necessary to demonstrate (or rule out) gravitational entanglement at macroscopic scales.
Glossary
- Atom interferometer: A device that splits and recombines atomic matter waves to measure phases with high precision, often used to probe gravity. "such as an atom interferometer near a large source mass"
- Center of mass coordinates: A coordinate system defined by the mass-weighted average position of a system, simplifying two-body dynamics alongside relative coordinates. "are the relative and center of mass coordinates respectively"
- Classical-quantum (CQ) gravity: A framework where the gravitational field is treated as fundamentally classical (possibly stochastic) while matter remains quantum, leading to characteristic decoherence and diffusion. "which they refer to as ``classical-quantum'' (CQ) gravity"
- Covariance matrix: A matrix of second moments (variances and covariances) of canonical variables, used to characterize Gaussian states and entanglement. "Consider the covariance matrix for an arbitrary state :"
- Decoherence: The loss of quantum coherence due to interaction with an environment or classical degrees of freedom, suppressing superpositions. "Coupling this field to quantum matter inevitably introduces decoherence on the matter itself."
- Decoherence-diffusion tradeoff: A constraint in CQ gravity relating decoherence and diffusion strengths to ensure physical (completely positive) evolution. "they must satisfy a specific relation (``decoherence-diffusion tradeoff'')"
- Dissipation: The non-unitary part of open-system dynamics that leads to irreversible evolution such as decoherence and diffusion. "The more complex part is the dissipation ."
- Ehrenfest theorem: The statement that expectation values of quantum observables follow classical equations of motion under certain conditions; here ensuring Newtonian dynamics on average. "Newton's law of gravity holds on average (``Ehrenfest theorem''):"
- Entanglement: Quantum correlations between subsystems that cannot be described classically, enabling nonlocal phenomena and serving as a key signature of quantized gravity here. "Now we need to quantify the entanglement."
- Entropic force: An effective force arising from statistical or thermodynamic tendencies (entropy gradients), proposed as a possible origin of gravity. "toy models of gravity as an emergent entropic force"
- Entropic gravity: The hypothesis that gravity emerges from underlying microscopic degrees of freedom as an entropic/thermodynamic phenomenon. "the entropic gravity model of~\cite{Carney:2025wmz}"
- Force noise spectral density: A frequency-domain measure (per Hz) of random force fluctuations acting on a system, used to quantify gravitationally induced noise. "This quantity has the same units as a force noise spectral density "
- Galilean symmetry: The invariance of non-relativistic physics under translations, rotations, and boosts (the Galilean group), imposed on the dynamical model. "Galilean symmetry: The dynamics is invariant under the action of the standard non-relativistic symmetries, i.e., the Galilean group."
- Gaussian approximation: An approximation that truncates dynamics to quadratic operators or assumes Gaussian states, simplifying analysis but potentially missing non-Gaussian effects. "because they made a Gaussian approximation."
- Gravitons: The hypothetical quantum particles (bosons) that mediate the gravitational field in a quantized theory of gravity. "They are quantized into gravitons, just like electromagnetic fields are quantized into photons"
- Hamiltonian: The generator of unitary time evolution representing the total energy (kinetic plus potential) of a system. "where the Hamiltonian is given by"
- Heisenberg equations of motion: Operator equations describing time evolution in the Heisenberg picture, linking quantum dynamics to classical evolution via expectation values. "The Heisenberg equations of motion in expectation value coincide with the classical Hamilton equations"
- Infrared regulator: A parameter introduced to control divergences from long-wavelength (low-momentum) modes in field-theoretic expressions. " is an infrared regulator."
- Lindblad master equation: The most general time-local, completely positive, trace-preserving evolution for Markovian open quantum systems, used here to model gravitational noise. "This will take the form of a Lindblad master equation."
- Measurement-feedback models: Models where classical gravitational interactions are mediated by measurements of quantum systems and subsequent feedback forces, leading to noise. "measurement-feedback models"
- Negativity: An entanglement measure defined from the sum of negative eigenvalues of the partially transposed density matrix; positive values certify entanglement. "The negativity is defined by"
- Newtonian potential: The classical gravitational potential energy between masses, proportional to . "the usual Hamiltonian for masses coupled by the Newtonian potential"
- Non-Gaussian evolution: Dynamics that cannot be captured by quadratic (Gaussian) terms alone, often involving higher-order or non-linear effects in open-system evolution. "namely non-Gaussian evolution on individual masses"
- Non-Markovian: Describing dynamics with memory effects, where evolution depends on past system states due to environmental correlations. "can lead to non-Markovian features in the evolution"
- Non-local noise: Correlated noise acting jointly on separate subsystems, not decomposable into independent local channels. "The non-local noise term proportional to "
- Non-relativistic limit: The regime where velocities are much smaller than the speed of light, allowing approximations consistent with Galilean symmetry. "Our treatment will be in the non-relativistic limit for the masses"
- Partial transpose: An operation on a bipartite density matrix (transposing one subsystem) used in entanglement tests like the Peres–Horodecki criterion. "based on the partial transpose"
- Path integral: A formulation of quantum mechanics/field theory where dynamics are expressed as sums over histories, used here to define CQ gravity relativistically. "can be defined relativistically, using a path integral."
- Penrose-Diosi style models: Proposals where gravity or mass distributions induce objective state reduction (collapse), leading to specific decoherence mechanisms. "including Penrose-Diosi style models"
- Ramsey protocol: An interferometric sequence (often in two-level systems) that measures phase evolution and coherence, used here to detect dephasing. "with a standard Ramsey protocol."
- Rotationally invariant: Invariant under spatial rotations; here constraining functional dependence in the Lindblad operators. "rotationally invariant functions"
- Torsion pendulum: A sensitive mechanical oscillator where a mass is suspended by a fiber and twists about its axis, used for precision force measurements. "where the source is a torsion pendulum"
- Ultraviolet regulator: A cutoff introduced to control divergences from short-wavelength (high-momentum) modes or small-distance physics. " is a small length scale that we have to introduce as an ultraviolet regulator."
- Yukawa-type mediator: A hypothetical massive-field mediator with Yukawa potential form, used as a simplified stand-in for gravitational interactions in modeling. "replacing the full gravitational field with a simple Yukawa-type mediator."
- Zero point fluctuations: Quantum fluctuations present even in the ground state of a harmonic oscillator, setting natural variance scales for position and momentum. "the zero point fluctuations "
Collections
Sign up for free to add this paper to one or more collections.

