- The paper introduces a unified pose-only geometric representation for both point and line features in VIO, eliminating the reliance on explicit feature coordinates.
- The paper demonstrates significant RMSE reductions on EuRoC and KAIST datasets by employing immediate measurement updates and robust base-frame selection.
- The paper verifies that the framework maintains real-time operation (>30 Hz) while effectively reducing linearization drift and suppressing measurement errors.
Pose-Only Geometric Representation-Based Kalman Filtering for Point-Line Visual-Inertial Odometry
Introduction
POPL-KF introduces a unified pose-only geometric representation for both point and line features in visual-inertial odometry (VIO), aiming to mitigate estimation errors in filter-based VIO frameworks. Mainstream systems, particularly those based on MSCKF, suffer from linearization errors associated with feature coordinate representations and delayed measurement updates. These issues are exacerbated in visually degraded environments. Previous works have demonstrated the efficacy of pose-only approaches for point features, but line features—despite their robustness in low-texture or motion-blurred scenes—have not yet been fully integrated with pose-only measurement models. POPL-KF advances the state by developing a rigorous pose-only formulation for line features and integrating both representations into the filtering framework.
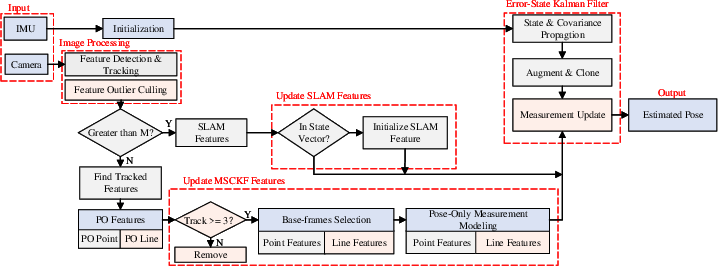
Figure 1: System overview of POPL-KF highlighting pose-only line processing steps.
Pose-Only Representation for Point and Line Features
Mathematical Foundations
Traditional VIO systems represent features via explicit 3D coordinates, forming measurement equations reliant on successful triangulation and thus delayed updates. The pose-only approach eliminates explicit feature coordinates by constructing measurement equations exclusively in terms of selected base-frame poses. For point features, depth estimation is analytically derived using relative pose and normalized image coordinates between base frames; measurement updates can occur immediately once sufficient poses are available. For line features, a novel pose-only constraint is formulated through multi-view geometry: spatial line direction vectors and distances are obtained by exploiting orthogonality relations between projection plane normals and spatial line directions in selected frames.
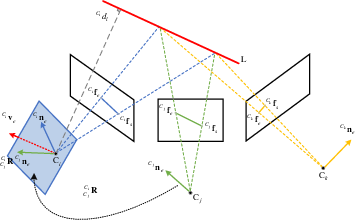
Figure 2: Illustration of pose-only representation for line features.
This formulation ensures measurement equations depend solely on IMU and camera extrinsic/intrinsic parameters, fully decoupling feature position estimation from the filtering state and suppressing linearization drift.
Unified Base-Frame Selection
A three-frame strategy selects optimal base frames by maximizing combined parallax or parallax angle among all co-observed frames, thereby improving numerical stability and observability. The algorithm discards unstable features based on coefficient of variation of depth/distance, further enhancing estimation accuracy.
Visual Frontend and Line Feature Culling Strategies
Line features extracted by EDLines, tracked via KLT, and filtered for quality are critical for robust operation in challenging environments. The culling strategy combines grid-based image partitioning—retaining only long lines in densely populated grids—and bidirectional optical flow consistency checks for sampled anchor points along lines. This dual mechanism suppresses short, redundant, and inconsistent line features, reducing erroneous associations and computational overload.
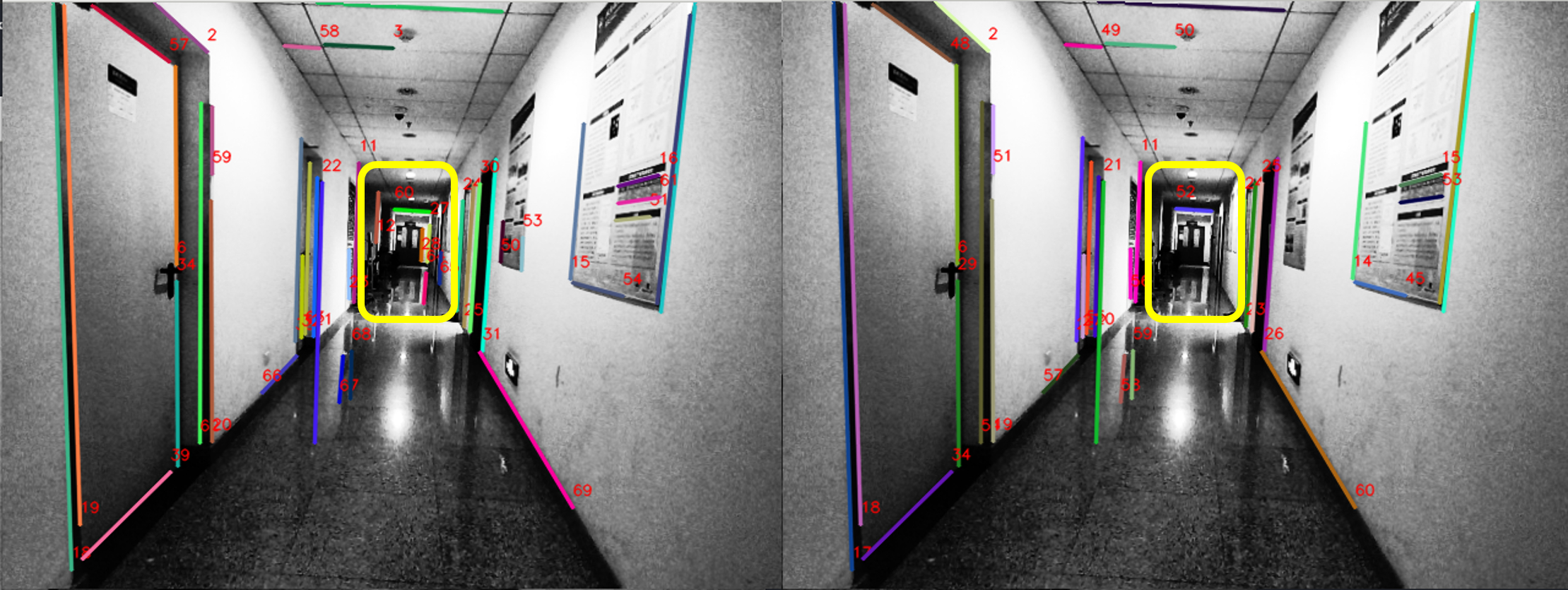


Figure 3: Grid-based culling and bidirectional optical flow consistency for line feature filtering.
Experimental Evaluation
Benchmark Results
POPL-KF is benchmarked on EuRoC and KAIST public datasets and real-world indoor/outdoor experiments. In complex MH sequences from EuRoC, POPL-KF achieves RMSE ATE reductions relative to OpenVINS (35.57%), PO-KF (33.16%), and PO-KF w/SP (15.54%). The system demonstrates strong global consistency and minimal drift, particularly under dim lighting and low-texture conditions where line features dominate.
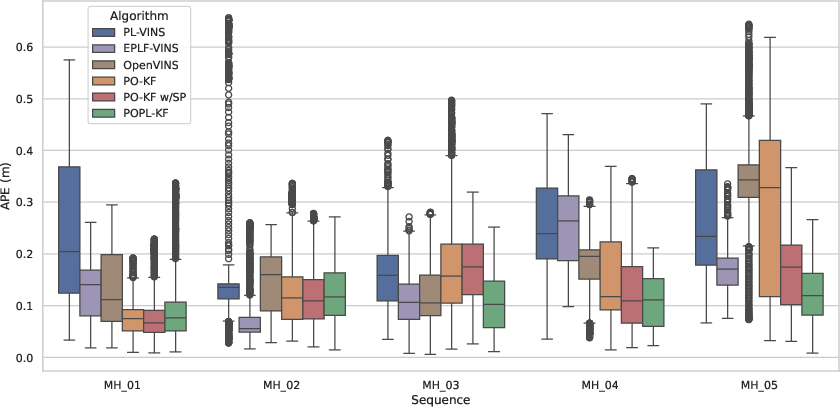
Figure 4: Trajectory estimation on EuRoC MH-05 highlighting performance in challenging regions.
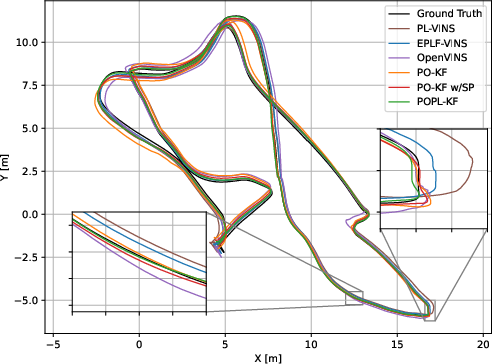
Figure 5: Trajectory comparison on KAIST urban39 sequence.
POPL-KF outperforms optimization-based systems (PL-VINS, EPLF-VINS) in both indoor and large-scale urban datasets, due to the elimination of explicit feature triangulation and immediate measurement update capability.
Ablation and Robustness Analysis
Ablation studies confirm the efficacy of both the pose-only representation (avoiding ill-conditioned triangulation and ensuring orthogonality/distances correctly estimated) and the line culling strategy. POPL-KF increases the median visual measurement utilization rate and exhibits fewer outlier depth/distance estimates, further confirmed by quantitative improvements in localization accuracy.
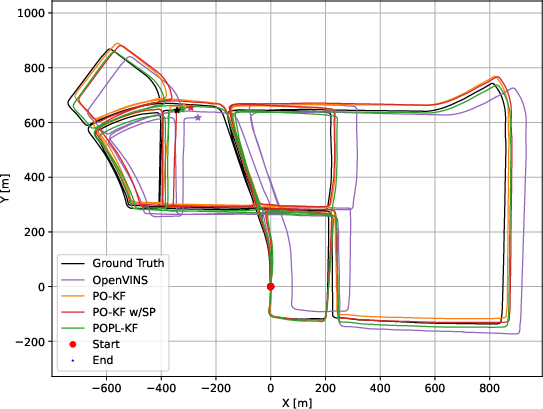
Figure 6: Ratio of input to updated measurement counts illustrating improved measurement utilization.
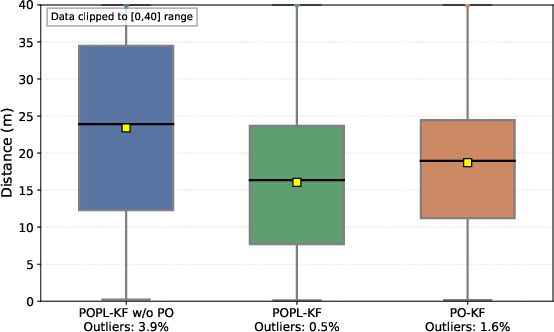
Figure 7: Estimated trajectories in real-world corridor, lab, and campus sequences.
Despite increased measurement update frequency, the pose-only approach avoids computationally demanding triangulation, complex feature-coordinate Jacobians, and null-space projections. Runtime penalty is sufficiently small to maintain real-time performance (>30 Hz), confirming suitability for embedded or resource-constrained deployments.
Theoretical and Practical Implications
POPL-KF demonstrates that pose-only formulations, extended from points to lines, address fundamental limitations in MSCKF-like filter-based VIO: state estimation drift due to delayed updates and persistent linearization errors from explicit feature coordinates. Its unified measurement model, combined with robust line filtering and base-frame selection, achieves high-precision trajectories even in scenes where traditional point-feature-based VIO diverges.
The system enables immediate measurement updates, providing improved temporal response. This is critical in rapidly varying or visually degraded environments. The formulation of line-feature constraints through pose-only geometry is physically interpretable and provides robust handling of man-made structural elements prevalent in indoor/outdoor urban environments.
Future Directions
A logical extension is to replace the standard Kalman Filter with the Unscented Kalman Filter or more advanced nonlinear filtering techniques, allowing better handling of nonlinearities in the measurement and state models. Further advances in line feature extraction, matching, and culling could further reduce computational overhead and improve robustness. Pose-only representations might also be extended to other geometric primitives (e.g., planes) and combined with semantic information for higher-level scene understanding.
Conclusion
POPL-KF presents a rigorous pose-only geometric representation for both point and line features in the VIO measurement model, eliminating reliance on explicit feature coordinates, suppressing linearization errors, and enabling immediate, robust measurement updates. Through systematic evaluation, the approach achieves superior localization accuracy and robustness over both optimization- and filter-based SOTA systems, while maintaining real-time operation. The proposed integration of pose-only line constraints with unified base-frame selection and line feature culling is shown to be critical for operating in challenging scenarios. This work lays a foundation for further research into efficient, robust VIO with geometric abstractions beyond points.
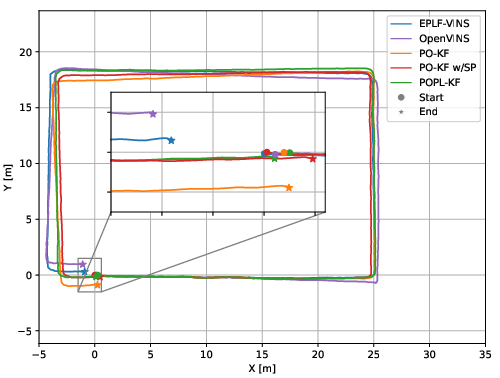
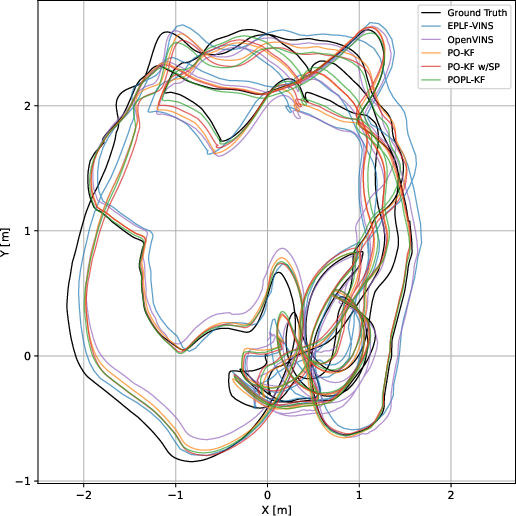
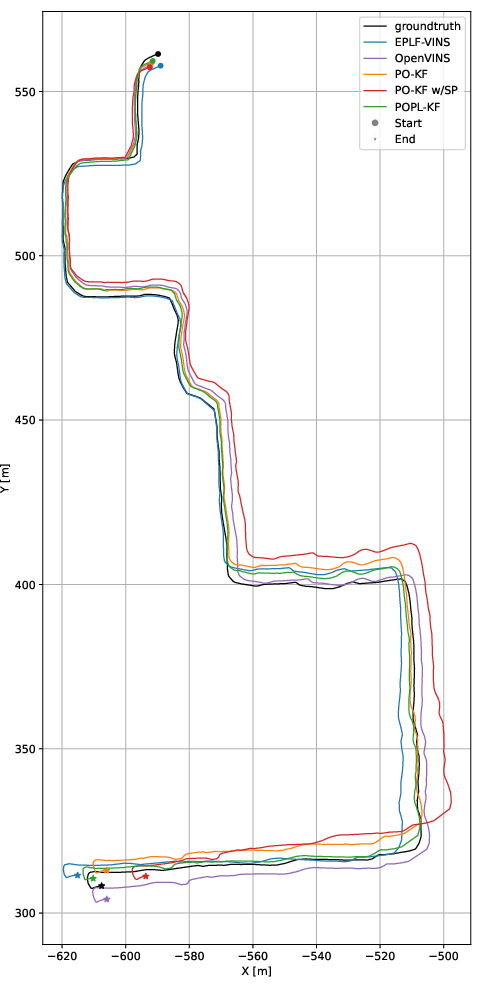
Figure 8: Trajectory consistency across diverse real-world sequences validating practical performance of POPL-KF.

