- The paper demonstrates a multi-scale digital twin framework that enhances experimental throughput and reproducibility in robotic chemistry.
- It utilizes GPU-accelerated simulation, modular semantics, and hierarchical skill libraries to accurately model physical, thermal, and chemical dynamics.
- Validated by sim-to-real tests with 75–90% success rates, MATTERIX paves the way for AI-driven, cost-efficient laboratory automation.
MATTERIX: A Multi-Scale Digital Twin Framework for Robotic Chemistry Lab Automation
Motivation and System Overview
The MATTERIX framework addresses longstanding limitations in experimental throughput and reproducibility in materials discovery by proposing a comprehensive, multi-scale digital twin for laboratory automation. Automation in chemistry and materials science remains bottlenecked by the need for direct real-world experimentation, largely due to the lack of virtualized, modular environments capable of simulating the multifaceted interplay of physical manipulation, heterogeneous device functionalities, and chemical processes intrinsic to wet laboratories.
MATTERIX integrates high-fidelity, GPU-accelerated robotics simulation with a modular semantics engine, extending the canonical Isaac Sim/Isaac Lab physics infrastructure. The system models not only rigid body and particle-based fluid/powder dynamics, but also laboratory-specific semantics such as heat transfer and chemical reaction kinetics—critical for workflow verification and protocol prototyping. MATTERIX’s open-source asset library, simulation-to-real interfaces, and hierarchical skill libraries facilitate rapid hypothesis testing and reduction in costly physical trials.
Core Architecture and Simulation Principles
MATTERIX’s modular architecture consists of distinct layers for virtual environment generation, manipulation/perception skill composition, device semantics, and sim-to-real deployment. Users assemble laboratory scenes using Universal Scene Description (USD) assets (glassware, robots, platforms, lab tools), extensible via standard 3D sources or NeRF-based scene reconstruction for high visual-fidelity objects. Particle-based dynamics are employed for fluids and powders, ensuring faithful simulation of mass transfer and material handling in common experimental protocols.
A highlight is the integration of a semantics engine, which augments the physical simulation state with logical and continuous semantic variables. This enables the modeling of events (e.g., activating a heater) and processes (e.g., heat transfer, chemical kinetics) as first-class dynamic components.
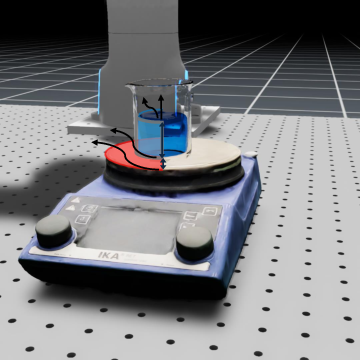
Figure 2: Heat transfer pathways in a standard setup, demonstrating conduction from heater to beaker to solution, with convective losses to ambient air.
The heat transfer model applies classic energy balance formulations combining conduction and convection, using user-configurable physical parameters for all laboratory objects. This is essential for workflows where reaction rates are temperature dependent or require precise thermal cycling.
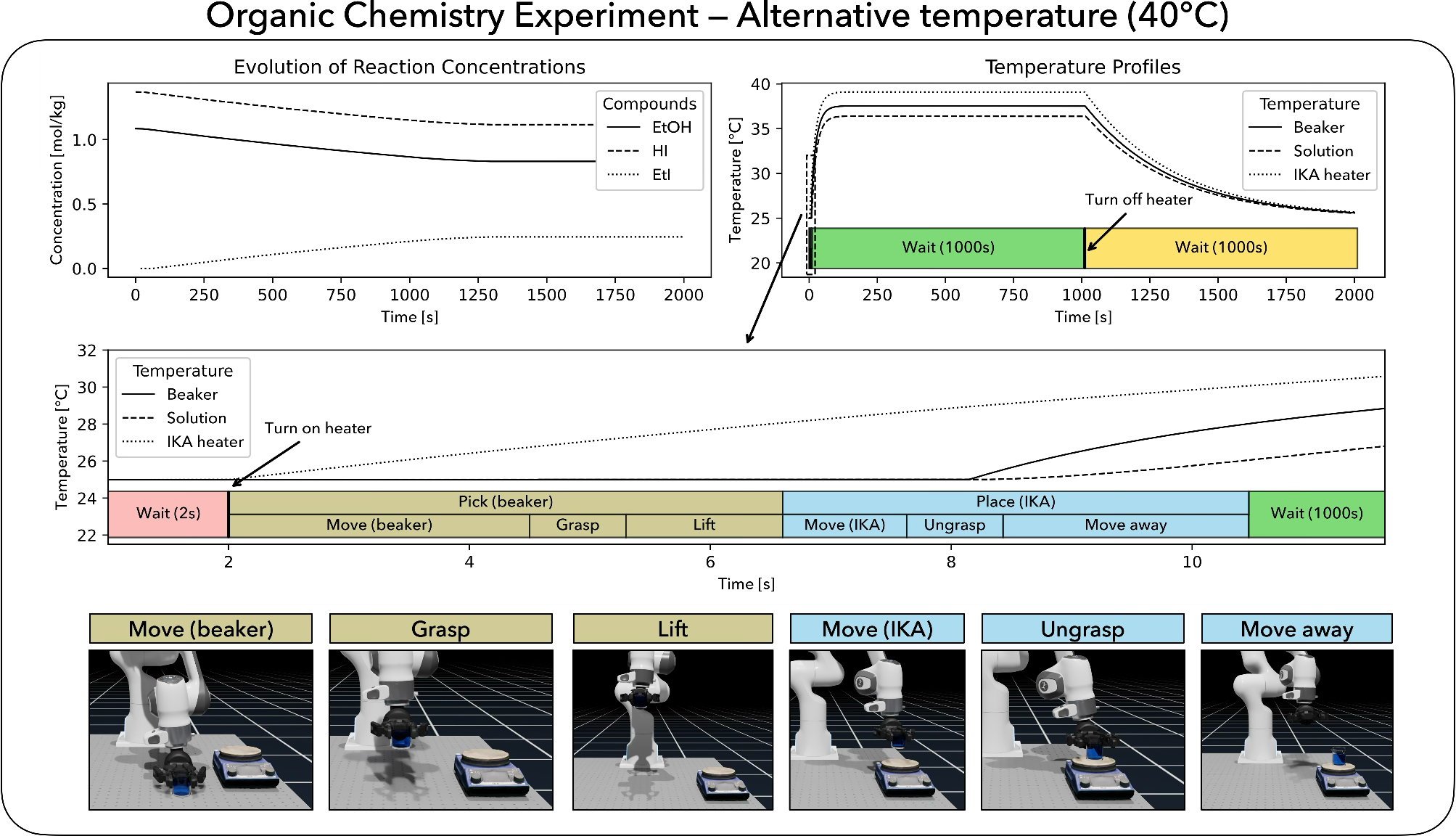
Figure 4: Multi-scale simulation of an organic reaction, tracking physical manipulation, heat transfer, and product evolution with variable target heater temperature.
Chemical reaction simulation is handled via a kinetics module supporting both fixed-rate and Arrhenius-formulas, applying precondition checks (reactant presence, temperature bounds) and updating container inventories and concentrations as workflows evolve. This modeling, though approximate, supports multi-step, branched experimental protocols and allows for rapid prototyping and debugging of workflow logic before physical deployment.
Skill Libraries and Workflow Representation
Manipulation and perception are encapsulated in a hierarchical skill library, supporting both classical methods (IK, whole-body control, motion planning with cuRobo) and learning-based policies (PPO, imitation learning, curriculum RL). Perception leverages FoundationPose, a zero-shot 6D object pose estimator, obviating the need for fiducials or manual calibration even when transferring protocols to real robots.
Workflow execution adopts a hierarchical state machine formalism, enabling arbitrary compositional depth. Leaves correspond to primitive skills, enabling easy formal mapping of multi-step chemistries to executable robot programs. The modularity supports seamless integration of new hardware or policies and facilitates co-design between chemists and roboticists.
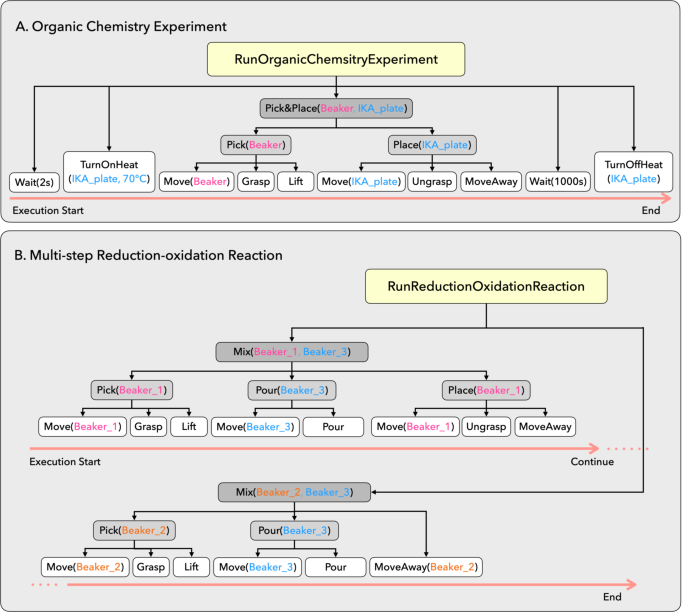
Figure 6: Visualization of hierarchical state machines employed for representative organic and redox experimental workflows within MATTERIX.
Simulation-to-Real Transfer and Experimental Validation
A primary claim is MATTERIX’s demonstrated sim-to-real transferability. Protocols, including pick-and-place, liquid dispensing, and two-step redox workflows, are scripted and tested in simulation before direct deployment in real laboratory setups with heterogeneous agents (robot arms, liquid handlers). This is accomplished with direct control and sensory synchronization between simulation and real-world devices, supporting online object pose updates and impedance-controlled motions for robustness against model mismatch.
Benchmarks reveal 75–90% success in repeated manipulations under realistic noise, with identified errors primarily due to calibration drift or perception outliers—underscoring the need for further co-refinement of sim and real assets at the object and environment levels.
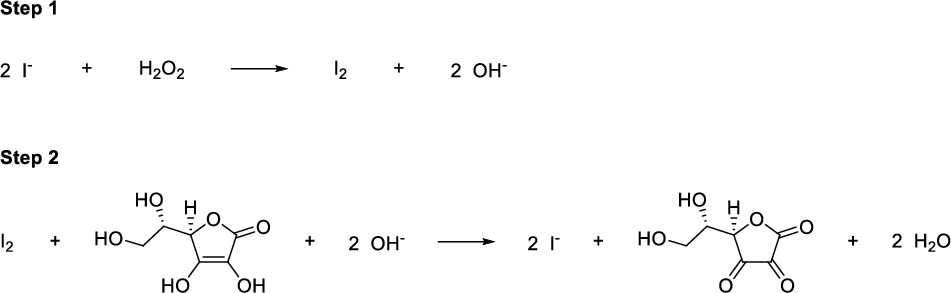
Figure 8: Reaction equations and qualitative outcomes for two-step redox-oxidation protocol as simulated and validated in parallel in MATTERIX and physical lab environments.
Implications and Prospects
MATTERIX represents an authoritative step in unifying high-fidelity physics with laboratory semantics in service of robotics-enabled chemical discovery. The framework’s support for workflow verification, synthetic data generation, and reinforcement learning policy development reduces reliance on in-lab trial-and-error and accelerates iteration in experimental planning.
The open-source asset and workflow libraries, along with strong sim-to-real integration, position MATTERIX as a reference architecture for benchmark creation and collaborative research between AI, robotics, and chemistry automation communities. The inclusion of particle and thermal dynamics, modular device semantics, and learning-enabled skill libraries enables comprehensive simulation of a broad spectrum of laboratory protocols.
Limitations remain in reaction modeling accuracy (semi-quantitative kinetics, exclusion of gas-phase processes), fidelity of sim-to-real transfer under domain shift, and the need for more responsive, failure-tolerant workflow graphing (e.g., behavior trees over strict state machines).
Future Directions
Integration of more accurate reaction models (potentially using ML-predicted energetics and quantum chemistry surrogates), augmentation with IoT feedback for adaptive digital twins, and further extension of perception/planning via state-of-the-art VLM and LLM approaches will be critical. Expanding multi-agent and multimodal skill libraries (including soft-matter manipulation), and supporting active online co-adaptation using real laboratory telemetry, could further enhance deployment robustness and scientific insight.
Finally, MATTERIX’s architecture serves as a basis for AI-driven experimental planning: auto-generating, simulating, and verifying new protocols at scale before committing precious laboratory resources.
Conclusion
MATTERIX offers a rigorous, modular, and extensible digital twin environment for robotics-assisted chemistry automation, bringing together simulation of manipulation, perception, logic, device semantics, and chemical kinetics. By enabling rapid prototyping, synthetic data generation, and seamless sim-to-real transfer, it supports the next generation of self-driving labs and AI-enabled scientific discovery. Future work will further enhance model fidelity, workflow flexibility, and the integration of autonomous learning and planning, consolidating MATTERIX's impact across scientific automation and robotics.