- The paper presents a unified four-stage lifecycle for digital twins, combining physics-based simulations and large language models.
- It demonstrates the use of advanced generative models and hybrid neural methods to achieve high-fidelity, real-time mirroring and predictive control.
- The study emphasizes agentic autonomy through LLMs and multimodal foundation models, enabling dynamic, self-optimizing systems across various sectors.
Digital Twin AI: Integrative Frameworks and Emerging Directions from LLMs to World Models
Conceptual Framework for AI-Driven Digital Twins
The paper "Digital Twin AI: Opportunities and Challenges from LLMs to World Models" (2601.01321) synthesizes the convergence of digital twin (DT) technology and state-of-the-art AI, presenting a unified four-stage lifecycle that systematically structures the intelligence evolution of digital twins. The framework comprises (1) modeling physical systems, (2) mirroring via digital simulators, (3) intervention through predictive and optimization techniques, and (4) realizing autonomous management by leveraging agentic AI, LLMs, and multimodal foundation models.
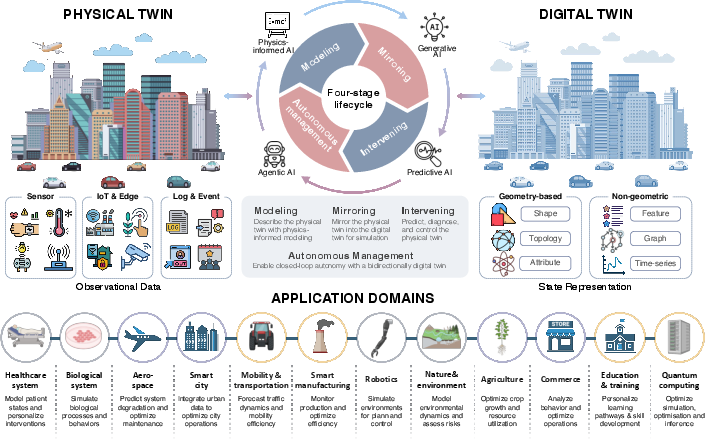
Figure 1: Four-stage AI-driven digital twin lifecycle encompassing modeling, mirroring, intervention, and autonomous management across diverse application domains.
This layered architecture generalizes across verticals, including healthcare, aerospace, manufacturing, urban infrastructure, robotics, and beyond. The authors delineate how AI methods are embedded at each layer, elevating digital twins from passive data repositories to proactive, learning-enabled, and agentic systems.
The paper provides an exhaustive breakdown of physical system modeling paradigms, highlighting the advances from classical numerical solvers to hybrid physics-informed neural models. Notably, techniques such as Physics-Informed Neural Networks (PINNs), Deep Operator Networks (DeepONet), and Fourier Neural Operators (FNO) are presented as key enablers for incorporating domain knowledge, ensuring physical consistency, and delivering high-fidelity, data-efficient surrogate models.
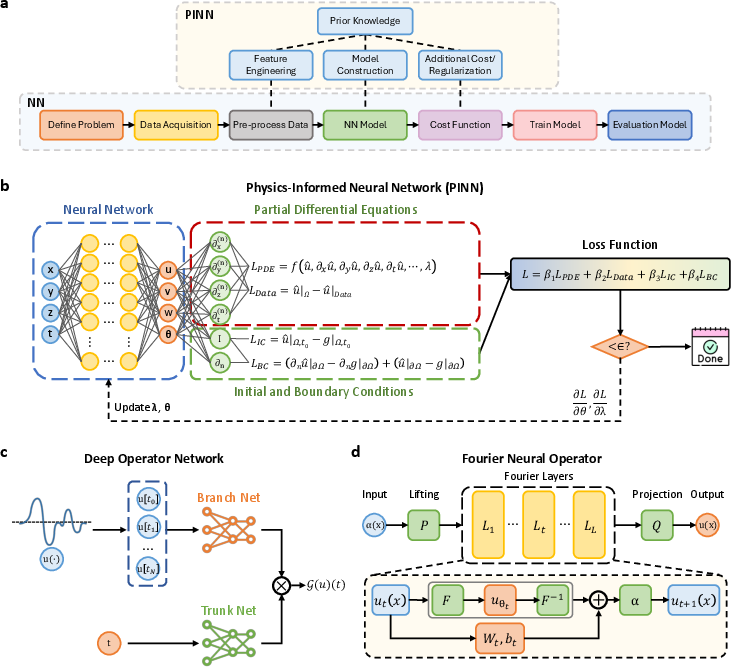
Figure 2: AI and physics-based digital twin modeling: PINNs, DeepONet, and FNOs support efficient, physically grounded learning for complex PDE systems.
The explicit integration of physical priors into the AI architectures addresses generalization, interpretability, and computational tractability—core requirements for industrial-grade simulation and control in DT deployments. These techniques are complemented by robust data assimilation pipelines, enabling continuous alignment of models with heterogeneous, real-time sensor data and ensuring resilience to noise, missing data, and structural drift.
Generative World Modeling: From GANs to 3D Simulation
For high-dimensional mirroring and immersive simulation, the paper reviews advanced generative models—GANs, denoising diffusion models, NeRFs, and 3D Gaussian Splatting (3DGS)—as scalable frameworks for representing and updating digital twins in 2D/3D/4D spatial domains.
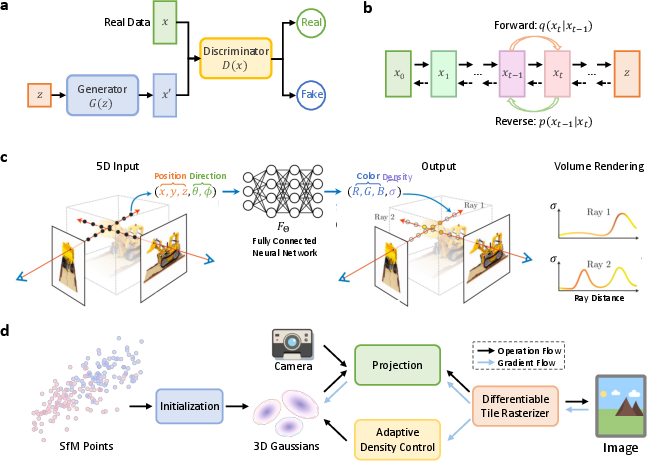
Figure 3: Comparison of GAN, diffusion, NeRF, and 3DGS frameworks driving the generative and reconstructive modeling capacities for digital twins.
Generative visual world models support both realistic scene synthesis and novel scenario imagination, acting as digital proxies for perception, planning, and training in embodied AI and robotics contexts. The authors emphasize the move toward controllable and interactive simulators, where world models are conditioned on structured prompts, action plans, or cross-modal instructions, facilitating end-to-end simulation-to-real workflows.
Intervention: Predictive Modeling, Diagnostics, and Control
The intervention layer formalizes the downstream application of digital twins for forecasting, anomaly detection, and optimal control. The authors detail a range of model classes utilized in predictive maintenance, anomaly identification, and adaptive operations—spanning GNNs for relational reasoning, sequence transformers for temporal modeling, and hybrid AI/optimization schemes for real-time decision making.
Robustness and timeliness are identified as critical, particularly in large-scale, safety-critical systems (aerospace, power grids, smart manufacturing). Reinforcement learning enhanced with digital twin environments is highlighted for enabling adaptive optimization, while continuous data-driven calibration ensures fidelity under nonstationary and stochastic disturbances.
Cognitive and Agentic Autonomy via LLMs and Foundation Models
A central argument of the paper is that recent advances in LLMs and multimodal foundation models (e.g., GPT-4, BLIP-2, Flamingo) can supply the cognitive substrate for the autonomous management of digital twins. The authors propose that natural language interfaces, schema translation, and retrieval-augmented reasoning enable human-aligned, intent-driven control, trust calibration, and explainability within DT ecosystems. Simultaneously, foundation models support global situational awareness via joint semantic analysis of images, timeseries, and structured logs.
Agent-based management architectures realize MAPE-K closed-loop autonomy, where self-optimization and continual adaptation are operationalized as learning and planning loops, leveraging both environment interaction and historical system knowledge.
Healthcare as an Exemplar Vertical
The healthcare discussion operationalizes the above framework, demonstrating a closed-loop, patient-centric digital twin lifecycle that integrates heterogeneous data streams, physiological modeling, diagnostic analytics, virtual clinical trials, and adaptive intervention.
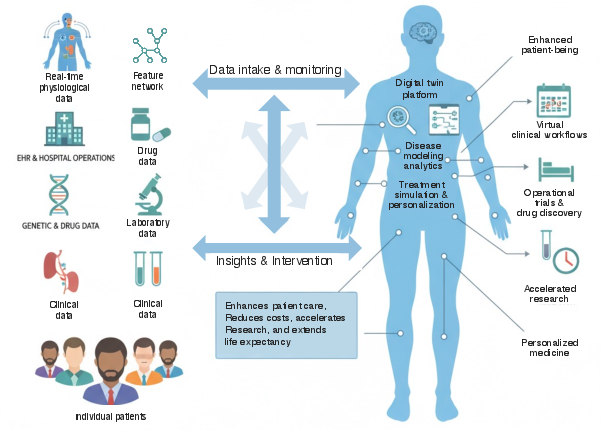
Figure 4: Multi-modal patient data integration into a digital twin platform enabling dynamic disease modeling, personalized therapy optimization, and continuous care.
Numerical and empirical evidence from recent deployments shows substantial efficiencies in workflow, improvement in predictive and diagnostic accuracy, and enabling of personalized medicine workflows.
Theoretical and Practical Implications
Theoretical Implications
- The four-stage lifecycle clarifies the required AI capabilities and interfaces at each maturity level of digital twins.
- The integration of physics-based and foundation models frames research directions on generalization, uncertainty quantification, and physical consistency in neural simulators.
- The agentic paradigm prompts investigation into safe autonomy, verifiable multi-agent orchestration, and scalable federated architectures.
Practical Implications and Future Directions
- AI-empowered digital twins promise system-wide optimization, democratized decision-making, and accelerated innovation across industrial and societal domains.
- Open challenges remain: scalability to planetary-scale systems, explainability and trust in closed-loop autonomy, and cross-domain transfer of models and protocols.
- Emerging frontiers include quantum-accelerated digital twins, multi-scale integration spanning molecules to cities, and the principled fusion of data-centric and physics-centric approaches.
- The potential for human-AI collaborative management systems may redefine operator roles, augmenting, not supplanting, human expertise with explainable, controllable, and auditable agents.
Conclusion
This paper delivers a foundational, domain-agnostic synthesis of the evolution and prospects of AI-driven digital twins. Through a methodical framework, it proposes a progression from physics-informed modeling to fully agentic, cognitively-enabled autonomous management, substantiated by a thorough taxonomy of modeling technologies, generative capabilities, and learning paradigms. The work sets a research agenda for the next phase of DT-AI convergence, foregrounding rigorous bridges between physical modeling, learning, cognition, autonomy, and trustworthy human-AI interaction (2601.01321).

