ObjSplat: Geometry-Aware Gaussian Surfels for Active Object Reconstruction
Abstract: Autonomous high-fidelity object reconstruction is fundamental for creating digital assets and bridging the simulation-to-reality gap in robotics. We present ObjSplat, an active reconstruction framework that leverages Gaussian surfels as a unified representation to progressively reconstruct unknown objects with both photorealistic appearance and accurate geometry. Addressing the limitations of conventional opacity or depth-based cues, we introduce a geometry-aware viewpoint evaluation pipeline that explicitly models back-face visibility and occlusion-aware multi-view covisibility, reliably identifying under-reconstructed regions even on geometrically complex objects. Furthermore, to overcome the limitations of greedy planning strategies, ObjSplat employs a next-best-path (NBP) planner that performs multi-step lookahead on a dynamically constructed spatial graph. By jointly optimizing information gain and movement cost, this planner generates globally efficient trajectories. Extensive experiments in simulation and on real-world cultural artifacts demonstrate that ObjSplat produces physically consistent models within minutes, achieving superior reconstruction fidelity and surface completeness while significantly reducing scan time and path length compared to state-of-the-art approaches. Project page: https://li-yuetao.github.io/ObjSplat-page/ .
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
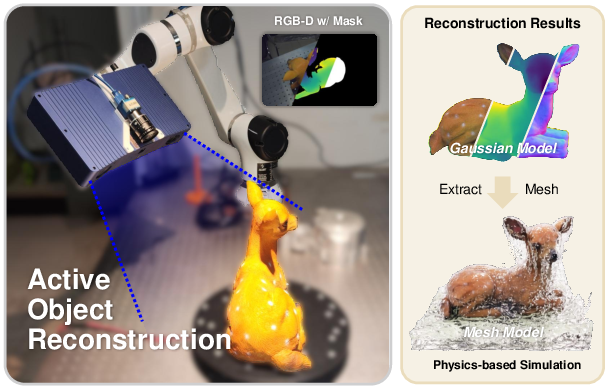
This paper introduces ObjSplat, a smart robot system that can quickly build high-quality 3D models of real objects on its own. The system doesn’t just make the object look realistic; it also captures the shape very accurately so the model can be used in physics simulations, virtual reality, and digital museums.
Key Objectives
The research asks simple but important questions:
- How can a robot figure out which parts of an object are not well scanned yet?
- How can it choose the best places to move next to finish the scan quickly and well?
- How can it create a 3D model that looks real and has correct geometry at the same time?
How They Did It
The 3D pieces: “Gaussian surfels”
Imagine covering an object with lots of tiny, flat stickers, each with color and direction. These stickers are called “Gaussian surfels” (think of coin-sized patches). Each surfel knows:
- Where it sits on the object,
- Which way it faces (its surface normal),
- How big it is,
- What color it shows from different viewing angles,
- How opaque it is (how solid vs. see-through).
By rendering these surfels into the camera image and comparing to what the camera actually sees, the system can improve both appearance and shape at the same time.
Finding what’s missing or wrong
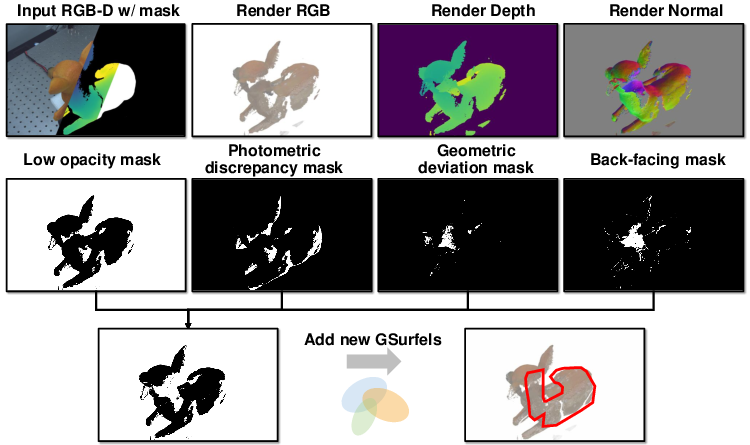
When the robot takes a new picture (RGB-D: color plus depth), ObjSplat checks for areas that need improvement:
- Low coverage: Spots where the model looks “thin” or see-through.
- Color mismatch: Places where the model’s color doesn’t match the real photo.
- Shape mismatch: Areas where the model’s depth (distance) doesn’t match the camera’s depth.
- Back-face viewing: If the camera is looking at the “back side” of a surface that should be seen from the front, that’s a sign the model may be incomplete or tricky (like thin parts).
Where it finds problems, it adds new surfels and adjusts existing ones. It also uses surface normals (the direction each patch faces) to keep the model’s shape sharp and consistent, not blurry.
Seeing what’s truly visible (handling occlusion)
A big challenge is knowing whether two camera views really saw the same part of the object. Sometimes, a piece might look “in view” but is actually blocked by another part (occluded), or the camera is looking at its back side.
To fix this, ObjSplat simulates what the camera should see and checks:
- Is the spot hidden behind something?
- Is the camera looking at the back of that surface? If yes, it doesn’t count that as truly visible. This makes its decisions much more reliable for complex objects with holes, folds, or thin parts.
Planning the robot’s path: Next-Best-Path
Instead of always picking just the single “next best view,” which can lead to zig-zagging and wasted time, ObjSplat plans a short path of several future viewpoints at once. Think of it like planning your route through a store to grab everything efficiently, not just choosing the next aisle at random.
Here’s how it works:
- It places candidate viewpoints on a virtual shell around the object so the camera can see it well.
- It builds a simple graph that connects nearby viewpoints.
- It scores paths by trading off the “information gain” (how much new, useful detail you’ll capture) against how far the robot has to move.
- It chooses a path that maximizes useful details while minimizing travel distance.
This “next-best-path” approach reduces scanning time and avoids unnecessary moves.
The scanning setup
They use a robotic arm with a camera and a motorized turntable. The object sits on the turntable. If the arm can’t reach a viewpoint, the turntable rotates the object so the camera can see it—together they cover all angles.
Making the model consistent
The system constantly compares rendered images of the surfel model to the real camera images:
- It balances color accuracy (photometric loss) with shape accuracy (depth and normal consistency).
- It keeps opacity clean (mostly solid where the surface is, not fuzzy blends).
- It uses a segmentation model (like SAM) to focus only on the object, not the background.
Confidence and dynamic focus
Each surfel gets a “confidence” score based on how well and from how many good angles it’s been seen. Early in the scan, the system focuses on finding new, missing areas. Later, it shifts to refining quality (like fixing subtle errors on tricky surfaces).
Main Findings
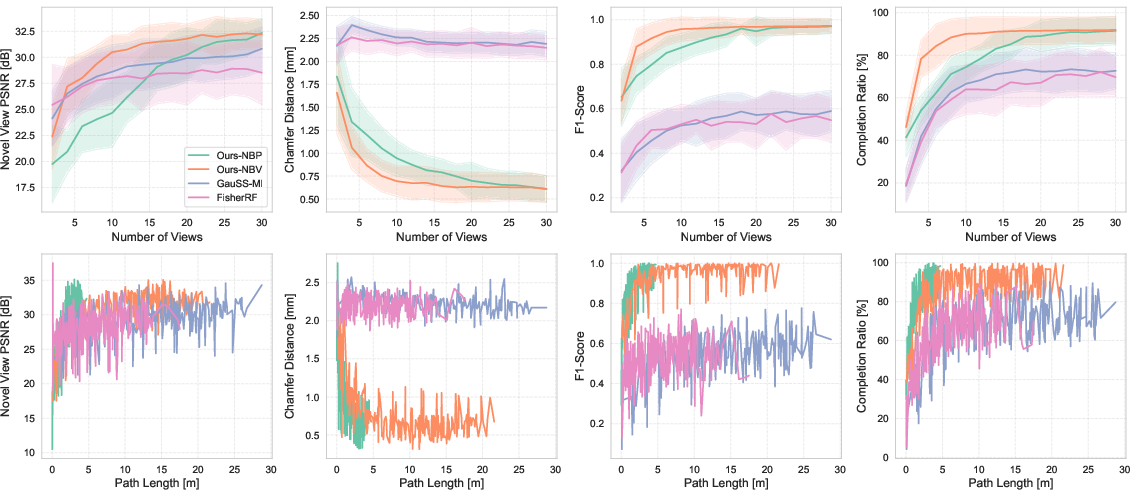
ObjSplat outperforms previous methods in tests on both simulated objects and real cultural artifacts:
- It builds more complete surfaces, capturing thin and self-occluded parts well.
- It makes models that look realistic and have accurate geometry suitable for physics simulations.
- It reduces scanning time and the total distance the robot travels, thanks to efficient path planning.
- It finishes high-quality reconstructions within minutes, instead of requiring slow, offline processing.
Why It Matters
- Better digital assets: Museums, games, and XR experiences need detailed, realistic models. ObjSplat makes them faster and more reliably.
- Stronger robotics research: Accurate models help bridge the “simulation-to-reality” gap, so robots trained in simulated worlds behave correctly in the real world.
- Less manual work: The robot chooses where to look next and improves the model on its own—no need for careful human-guided scanning.
- Practical for tricky objects: Handles holes, thin parts, and self-occlusions by being geometry-aware and planning smart paths.
In short, ObjSplat shows how combining a smart 3D surface representation with visibility-aware checking and multi-step path planning lets robots quickly create faithful digital twins of real objects.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise, actionable list of what remains missing, uncertain, or unexplored in the paper, to guide future research:
- Real-world applicability beyond a lab setup:
- Reliance on a turntable and eye-in-hand RGB-D camera limits deployment to small/medium, manipulable objects; feasibility for in-situ, immovable, or large-scale objects remains untested.
- Assumes clean object segmentation (via SAM); robustness in cluttered scenes, multi-object settings, or poor segmentation is not evaluated or addressed.
- Sensing and material limitations:
- Dependence on commodity RGB-D depth without explicit noise modeling or uncertainty propagation; performance on reflective, transparent, dark, or texture-poor materials is unclear.
- No treatment of radiometric calibration or illumination changes; robustness to specularities or strong view-dependent effects is not quantified.
- Representation and meshing:
- How the pipeline produces watertight meshes from 2D Gaussian surfels is under-specified (e.g., meshing algorithm, parameterization, and guarantees); watertightness, manifoldness, and fidelity trade-offs are not documented.
- Scalability of the surfel set (memory, rendering time, optimization speed) as model complexity grows is not analyzed; no level-of-detail or culling strategy is presented.
- Pose tracking and global consistency:
- Object-centric tracking relies on pairwise registration (ICP-like) without loop-closure or global pose graph optimization; long-horizon drift, failure modes with low overlap, and recovery strategies are not studied.
- Sensitivity to calibration errors and the interplay between pose errors and reconstruction/planning quality are not quantified.
- Geometry-aware covisibility and uncertainty modeling:
- Occlusion-aware covisibility uses a sparse random subset (≈1600 samples) and thresholds; estimator variance, bias under model incompleteness, and sensitivity to τd are not analyzed.
- Back-face detection via normal–optical-axis dot product may misclassify concave or highly curved regions and mixed normals from alpha blending; no ablation on false positives/negatives.
- The confidence update rule is heuristic (distance, frontal angle, diversity) with unclear theoretical grounding; no comparison to probabilistic or information-theoretic uncertainty (e.g., covariance, entropy, Fisher information) in object-centric settings.
- Planning assumptions and constraints:
- Candidate viewpoints are restricted to an object-centric hemispherical shell with inward-facing orientations; off-axis, grazing, or task-specific vantage points (e.g., for fine textures) are not considered.
- Edge weights and path scores use Euclidean distances and heuristic uncertainty rewards; kinematics, dynamics (velocity/acceleration/jerk), time, energy, and collision constraints (arm, environment, turntable, cables) are not modeled.
- The planner provides no optimality or bounded-suboptimality guarantees for the prize-collecting objective; sensitivity to k, M, α/β/λ hyperparameters and kNN graph connectivity is not reported.
- Replanning happens only at sub-goals; responsiveness to fast-changing uncertainty (e.g., large gains from early observations along a path) is untested.
- Termination and coverage guarantees:
- The stopping criterion based on average uncertainty lacks formal coverage/quality guarantees; risks of premature termination in self-occluded cavities or thin structures are not assessed.
- No analysis of failure cases where uncertainty saturates due to sensor/model bias rather than actual completeness.
- Joint optimization details and robustness:
- Several loss terms and thresholds (τO, τC, λ values, opacity regularizer) are fixed; there is no study of sensitivity, automatic scheduling, or adaptation across object categories.
- Normal supervision relies on depth-derived normals; compounding errors from depth noise and normal estimation are not modeled or mitigated.
- The geometry–texture optimization’s convergence behavior, stability under sparse/low-overlap frames, and robustness to segmentation errors are not examined.
- Evaluation scope and completeness:
- Real-world tests on four artifacts are limited in diversity; no systematic evaluation across shapes (genus, concavity), materials, and scales, or across different RGB-D sensors.
- Missing ablations on individual components (back-face term, covisibility, confidence, NBP path planner, dynamic weighting) to isolate contributions and failure modes.
- Metrics focus on reconstruction fidelity and efficiency; missing assessments on mesh watertightness/manifoldness, contact fidelity for physics, and path smoothness/time/energy.
- Integration with downstream tasks:
- Claims of “physically consistent assets” are not validated in physics engines (contact stability, collision accuracy, mass/scale consistency); no end-to-end task benchmarks (e.g., simulation-to-real transfer improvements).
- Learning and adaptivity:
- The dynamic uncertainty weighting and path planning are heuristic; no learning-based adaptation to object geometry/texture complexity or online meta-parameter tuning is explored.
- The framework does not leverage predictive models (e.g., learned visibility/coverage predictors) to reduce rendering-based evaluations or to anticipate occlusions.
- Generalization and multi-agent extensions:
- Single-sensor, single-robot setup only; benefits and challenges of multi-camera/robot coordination, shared uncertainty maps, and joint path optimization are unexplored.
- Reproducibility and clarity:
- Several equations contain typographical/formatting issues (missing brackets, symbols), hindering reproducibility; exact meshing and refinement settings, hardware specifications, and runtime breakdowns are insufficiently detailed.
- Public release status of code, models, and datasets is unclear; no standardized benchmarks for active object reconstruction are proposed.
Practical Applications
Immediate Applications
Below are actionable use cases that can be deployed with current capabilities described in the paper (RGB-D camera, robot arm + turntable, GPU workstation, object-centric scanning). Each item names the primary sector(s), the likely tool/product/workflow, and key assumptions or dependencies.
- Autonomous digitization cell for small-to-medium objects (e.g., artifacts, parts, products)
- Sectors: cultural heritage, manufacturing, e-commerce, media/XR
- Tools/products/workflows: “ObjSplat scanning cell” (robotic arm + turntable + RGB-D + ObjSplat software) producing watertight meshes and Gaussian models; batch scanning workflows with automatic view planning and export to Unreal/Unity, Blender, Omniverse/Isaac, MuJoCo
- Assumptions/dependencies: controlled lighting; non-translucent, non-mirror materials; accurate calibration (eye-in-hand and turntable); SAM-like segmentation available; GPU with CUDA; objects fit within reachable workspace
- Rapid generation of physically consistent digital twins for robotics simulation and benchmarking
- Sectors: robotics (R&D, QA), software/simulation
- Tools/products/workflows: asset pipeline from ObjSplat to simulation (PyBullet, Isaac Gym, MuJoCo), enabling sim-to-real evaluation with watertight meshes and surface normals; automated “scan-to-sim” scripts
- Assumptions/dependencies: simulator import compatibility; validated scale; object remains static during scan; physics parameters (mass/CoF) may still need manual estimation
- Museum and archive backroom digitization with reduced operator time
- Sectors: cultural heritage, public sector, education
- Tools/products/workflows: cart-based scanning station for cataloging collections; automated next-best-path reduces scan time; uncertainty heatmaps for curators to confirm coverage before storing
- Assumptions/dependencies: staff training; loan/handling protocols; secure storage for large model files; safe robot operation near delicate artifacts
- In-line or near-line inspection of geometrically complex components (thin-walled, hollow, self-occluded)
- Sectors: manufacturing (aerospace, automotive, medical devices)
- Tools/products/workflows: QC cells that use geometry-aware uncertainty to target under-reconstructed regions; automated “OK-to-ship” coverage criteria using opacity/completeness thresholds; CAD comparison overlays
- Assumptions/dependencies: matte surface prep for specular parts; integration with MES/QMS; fixture/turntable access; tolerance mapping from mesh to CAD
- Cost- and time-efficient content capture for XR/VR/AR catalogs
- Sectors: media/entertainment, e-commerce
- Tools/products/workflows: studio workflow where ObjSplat outputs photorealistic Gaussian models plus meshes; shot lists replaced by NBP; asset review using per-view uncertainty maps
- Assumptions/dependencies: PBR texture baking/pipeline integration; IP handling and metadata; post-processing for shading/rigging if needed
- Maker/3D-printing labs and university teaching labs: reliable scan-to-print pipeline
- Sectors: education, daily life (makerspaces)
- Tools/products/workflows: turnkey “scan-refine-print” stations; joint geometry–texture optimization improves mesh watertightness for slicing; simple checklists based on back-face/opacity thresholds
- Assumptions/dependencies: compatible slicer pipeline; minimal reflective/translucent materials; calibrated devices
- Dataset curation and algorithm evaluation with principled completeness metrics
- Sectors: academia, AI/vision research
- Tools/products/workflows: benchmark creation for active view planning using publicly reportable metrics (occlusion-aware covisibility, back-face detection, uncertainty maps); reproducible scanning trajectories via NBP
- Assumptions/dependencies: open licensing for assets; standardized sensor intrinsics/extrinsics; logging of planning and optimization states
- Inventory and claims documentation in controlled hubs
- Sectors: logistics, insurance
- Tools/products/workflows: backroom booths to capture high-fidelity 3D evidence of item condition; automatic coverage verification via visibility/uncertainty thresholds
- Assumptions/dependencies: controlled environment; item handling policies; privacy/data governance; throughput constraints
- Robotics courseware and lab exercises on active perception
- Sectors: education, academia
- Tools/products/workflows: teaching modules demonstrating NBV vs. next-best-path trade-offs; labs on view evaluation (back-face and covisibility) using provided ObjSplat code
- Assumptions/dependencies: access to a small arm, RGB-D camera, and GPU; safety training
Long-Term Applications
These use cases are plausible extensions that require additional research, robustness, scaling, or engineering (e.g., handling harsh materials, looser environments, larger objects, tighter integration with enterprise systems).
- Mobile or humanoid robots performing in-the-wild object digitization without turntables
- Sectors: service robotics, field digitization
- Tools/products/workflows: Object-centric NBP combined with mobile base navigation and grasp/reorientation to expose back faces; on-device uncertainty maps guiding whole-body motion
- Assumptions/dependencies: robust SLAM, grasp planners, safety; handling dynamic backgrounds and clutter; real-time constraints on embedded compute
- Automated reorientation (grasp-and-scan) for concave or occluded objects
- Sectors: manufacturing, cultural heritage
- Tools/products/workflows: coupling geometry-aware uncertainty with grasp pose selection to flip/tilt objects for complete coverage
- Assumptions/dependencies: safe manipulation of fragile items; object stability modeling; collision-aware planning
- Hybrid sensor fusion (polarization, photometric stereo, ToF/LiDAR) to handle shiny, transparent, or dark materials
- Sectors: manufacturing, medical devices, cultural heritage
- Tools/products/workflows: multi-modal active reconstruction where uncertainty drives sensor mode switching; reflectance-aware loss functions
- Assumptions/dependencies: additional sensors and calibration; materials modeling; more complex rendering/optimization
- Factory-scale autonomous inspection cells with MES/PLM integration
- Sectors: manufacturing, enterprise software
- Tools/products/workflows: ObjSplat embedded in automated QC lines with live NCR triggering; APIs to PLM/CAD for GD&T based pass/fail; dashboards using completeness/confidence KPIs
- Assumptions/dependencies: enterprise IT integration; cycle time guarantees; cybersecurity; robust uptime and self-calibration
- Retail and consumer self-service 3D capture kiosks
- Sectors: retail, daily life, e-commerce
- Tools/products/workflows: compact kiosks where consumers capture items/collectibles; automatic coverage guidance to users via uncertainty overlays; instant XR previews
- Assumptions/dependencies: simplified UX; safety and privacy; ruggedized hardware; automatic quality gating for difficult materials
- Asset standardization and policy for digital heritage preservation
- Sectors: policy/public sector, cultural heritage
- Tools/products/workflows: standards that codify occlusion-aware covisibility and back-face completeness metrics as acceptance criteria for funded digitization; procurement specs referencing uncertainty thresholds
- Assumptions/dependencies: consensus on metrics; reference datasets; long-term archival formats
- Cloud-native “scan-as-a-service” platforms
- Sectors: software/SaaS, media, e-commerce
- Tools/products/workflows: remote operation of scanning cells; job queues; automated post-processing (retopology, texture baking); quality reports from geometry-aware metrics
- Assumptions/dependencies: reliable uplink for depth/RGB streams; orchestration and scheduling; cost control for GPU instances
- Autonomous scene-to-object pipeline: object discovery, segmentation, and targeted reconstruction in clutter
- Sectors: robotics, logistics, warehouses
- Tools/products/workflows: perception stack that finds items on shelves/bins and invokes ObjSplat active scanning for SKUs needing high-fidelity models; uncertainty maps to drive multi-object scheduling
- Assumptions/dependencies: robust instance segmentation and pose estimation; occlusion management; safety in human-robot shared spaces
- Integration with generative priors for sparse-view bootstrapping then active refinement
- Sectors: AI/vision, media/XR
- Tools/products/workflows: diffusion/foundation models give initial coarse geometry; ObjSplat’s uncertainty targets missing regions; NBP plans efficient refinement passes
- Assumptions/dependencies: reliable prior confidence calibration; avoiding hallucination lock-in; compute budget for combined inference/optimization
- On-drone or on-rover object-level reconstruction in inspection and maintenance
- Sectors: energy, infrastructure, robotics
- Tools/products/workflows: NBP adapted to constrained flight envelopes; uncertainty-aware waypoint planning around assets (valves, insulators) to ensure coverage
- Assumptions/dependencies: GPS-denied navigation, wind and vibration robustness, safety/regulatory approvals
- Consumer-grade AR shopping with live, on-device active capture
- Sectors: consumer software, e-commerce
- Tools/products/workflows: smartphone apps guiding users with visual prompts based on back-face/visibility cues; edge-optimized Gaussian surfel variants
- Assumptions/dependencies: mobile-optimized rendering/optimization; commodity depth quality; battery and thermal constraints
Notes on cross-cutting assumptions and dependencies that affect feasibility:
- Sensor quality and material properties: RGB-D struggles on specular/transparent/black surfaces; mitigations (sprays, polarization) add process overhead.
- Calibration and stability: Eye-in-hand and turntable extrinsics must remain accurate; auto-check and self-calibration routines beneficial.
- Safety and compliance: Robotic operation near people and artifacts requires guarding, force limits, and institutional approvals.
- Compute and latency: Real-time uncertainty rendering is feasible on CUDA GPUs; embedded/mobile variants need optimization.
- Size and reach constraints: Current design targets tabletop objects; scaling to larger items demands mobile bases or multi-axis stages.
- Segmentation dependency: VFM (e.g., SAM) accuracy impacts mask quality; errors can degrade reconstruction and planning.
- Data governance and IP: High-fidelity assets require secure storage, licensing, and watermarking where appropriate.
Glossary
- 3D Gaussian splatting (3DGS): A rendering and reconstruction technique that represents scenes with many 3D Gaussian primitives for fast differentiable rasterization and novel view synthesis. "3D Gaussian splatting (3DGS)~\cite{kerbl20233d}"
- Active object reconstruction (AOR): A robotics task that autonomously selects viewpoints to efficiently build complete, high-fidelity models of unknown objects. "active object reconstruction (AOR) has emerged as a promising solution"
- Alpha blending: A compositing technique that accumulates color contributions along a ray using opacity weights to produce final pixel colors. "computed through -blending as follows:"
- Back-face visibility: The explicit handling of whether the backside of a surface is visible or being erroneously observed, critical for object-centric views and open surfaces. "explicitly models back-face visibility and occlusion-aware multi-view covisibility"
- Binary cross-entropy (BCE): A loss function for binary classification or mask supervision that measures divergence between predicted probabilities and binary labels. "we employ a binary cross-entropy (BCE) loss"
- Covisibility: The degree to which the same surface regions are visible across multiple views, used to assess overlap and consistency. "occlusion-aware multi-view covisibility,"
- D-SSIM (Differentiable Structural Similarity Index Measure): A differentiable variant of SSIM used as a photometric loss to compare image structures. "differentiable structural similarity index measure (D-SSIM) term~\cite{wang2004image}"
- Differentiable splatting: A rasterization approach that projects Gaussian primitives onto the image plane with gradients, enabling optimization via backpropagation. "projected onto the image plane using differentiable splatting~\cite{kerbl20233d}"
- Eye-in-hand: A robotic sensing configuration where the camera is mounted on the robot’s end effector, enabling flexible viewpoint control. "a robotic arm equipped with an eye-in-hand RGB-D camera"
- Fisher information: An information-theoretic quantity that measures how much a view reduces model parameter uncertainty, used to guide active selection. "FisherRF~\cite{jiang2024fisherrf} and GauSS-MI~\cite{xie2025gauss} leverage Fisher information"
- Frontier-based methods: Exploration strategies that expand reconstruction by targeting boundaries between known and unknown regions. "using frontier-based methods~\cite{border2024surface, jia2025pb}"
- Gaussian mixture models (GMMs): Probabilistic models that represent data as mixtures of Gaussian components, applied here to fit visibility distributions over voxels. "leverages GMMs to fit voxels of varying visibility"
- Gaussian surfels: Disc-like surface elements with Gaussian spatial footprints that capture local geometry and appearance for efficient surface rendering. "2D Gaussian surfels (GSurfels)~\cite{dai2024high}"
- K-nearest neighbors (k-NN): A graph construction and search strategy connecting each node to its nearest neighbors in Euclidean space. "connecting each viewpoint to its -nearest neighbors (-NN)"
- Mesh-based Gaussian splatting: Methods that bind Gaussians directly to mesh surfaces or use triangulations to enforce explicit surface consistency. "mesh-based Gaussian splatting methods~\cite{guedon2025milo, Held2025Triangle, Held2025MeshSplatting}"
- Multi-resolution 3D hash grids: Sparse, multi-scale grid encodings that accelerate neural field optimization and improve geometric fidelity. "multi-resolution 3D hash grids~\cite{li2023neuralangelo}"
- Multi-view stereo (MVS): A technique that estimates dense 3D structure from multiple calibrated images. "SfM/MVS~\cite{schoenberger2016mvs}"
- Neural radiance fields (NeRF): Implicit volumetric representations that map 3D positions and view directions to color and density for photorealistic rendering. "neural radiance fields (NeRF)~\cite{mildenhall2021nerf}"
- Next-best-path (NBP): A planning strategy that performs multi-step lookahead to select a path of viewpoints optimizing information gain and travel cost. "next-best-path (NBP) planner"
- Next-best-view (NBV): A greedy strategy that selects the single next viewpoint maximizing an information or uncertainty metric. "next-best-view (NBV) planning problem"
- Occlusion-aware covisibility: A covisibility measure that explicitly accounts for self-occlusions and back-facing surfaces to avoid false correspondences. "occlusion-aware multi-view covisibility,"
- Poisson reconstruction: A method that converts point clouds into watertight meshes by solving a screened Poisson equation. "Poisson reconstruction~\cite{kazhdan2013screened}"
- Prize-collecting traveling salesman problem (PC-TSP): A TSP variant where visiting nodes yields rewards (“prizes”), balancing path length against collected information. "prize-collecting traveling salesman problem (PC-TSP)~\cite{balas1989prize}"
- Radiance fields: Continuous volumetric functions describing scene appearance (color/density) used for novel view synthesis and reconstruction. "advances in radiance fields, represented by neural radiance fields (NeRF) and 3D Gaussian splatting (3DGS)"
- RGB-D: Sensor data comprising synchronized color (RGB) and depth (D) images. "ObjSplat progressively reconstructs unknown objects from RGB-D frames"
- Restricted Delaunay triangulation: A constrained triangulation technique that enforces consistency of surface meshes by restricting Delaunay connections. "restricted Delaunay triangulation to enforce surface consistency,"
- SE(3): The 3D rigid-body transformation group combining rotations and translations (Special Euclidean group). "pose "
- Shannon mutual information: An information measure quantifying dependence between variables, used to target views that reduce model uncertainty. "Shannon mutual information"
- Signed distance functions (SDFs): Scalar fields giving the signed distance to a surface, positive outside, negative inside, zero on the surface. "signed distance functions (SDFs)~\cite{wang2021neus}"
- SO(3): The 3D rotation group (Special Orthogonal group), often parameterized by quaternions or rotation matrices. "quaternion "
- Spherical harmonics (SH): Orthogonal basis functions on the sphere used to model view-dependent color in Gaussian surfels. "spherical harmonics (SH) coefficients of degree "
- SSIM (Structural Similarity Index Measure): An image similarity metric assessing luminance, contrast, and structure differences. "SSIM(C, \hat{C})"
- Structure-from-Motion (SfM): A pipeline that estimates camera poses and sparse 3D structure from image sequences. "structure-from-motion (SfM)~\cite{schoenberger2016sfm}"
- Transmittance: The accumulated fraction of light/radiance that passes through without being absorbed along a ray. "The term represents the accumulated transmittance."
- TSDF fusion: Integration of Truncated Signed Distance Function volumes from depth measurements to form explicit meshes. "TSDF fusion or Poisson reconstruction~\cite{kazhdan2013screened}"
- Visibility fields: Learned or computed fields indicating which surfaces are visible from given viewpoints. "visibility fields~\cite{xue2024neural}"
- Vogel spiral pattern: A deterministic sampling pattern that distributes points quasi-uniformly on a disk or sphere. "using a Vogel spiral pattern~\cite{vogel1979better}"
- Water-tight mesh: A closed, hole-free surface mesh suitable for physics simulations and downstream applications. "water-tight mesh"
Collections
Sign up for free to add this paper to one or more collections.

