Design and Development of Modular Limbs for Reconfigurable Robots on the Moon
Abstract: In this paper, we present the development of 4-DOF robot limbs, which we call Moonbots, designed to connect in various configurations with each other and wheel modules, enabling adaptation to different environments and tasks. These modular components are intended primarily for robotic systems in space exploration and construction on the Moon in our Moonshot project. Such modular robots add flexibility and versatility for space missions where resources are constrained. Each module is driven by a common actuator characterized by a high torque-to-speed ratio, supporting both precise control and dynamic motion when required. This unified actuator design simplifies development and maintenance across the different module types. The paper describes the hardware implementation, the mechanical design of the modules, and the overall software architecture used to control and coordinate them. Additionally, we evaluate the control performance of the actuator under various load conditions to characterize its suitability for modular robot applications. To demonstrate the adaptability of the system, we introduce nine functional configurations assembled from the same set of modules: 4DOF-limb, 8DOF-limb, vehicle, dragon, minimal, quadruped, cargo, cargo-minimal, and bike. These configurations reflect different locomotion strategies and task-specific behaviors, offering a practical foundation for further research in reconfigurable robotic systems.



Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Design and Development of Modular Limbs for Reconfigurable Robots on the Moon — Explained Simply
What is this paper about?
This paper shows how a team built “Lego-like” robot parts, called modular limbs, that can snap together in different ways to make many kinds of robots for the Moon. By mixing the same limbs with wheel units, they can quickly create robots that walk, roll, carry heavy things, or use an arm to grab objects. This is useful on the Moon, where missions need to do many jobs with limited equipment.
What questions were the researchers asking?
In simple terms, the team wanted to know:
- Can we make one limb design that is strong, precise, and fast enough to do many different jobs (like walking, driving, or lifting)?
- Can these limbs connect and disconnect easily to form several robot shapes?
- Will the motors and controls work smoothly and safely under heavy loads?
- Can these robots actually move and do tasks in rough, real-world environments (like sandy, uneven ground)?
How did they build and test it?
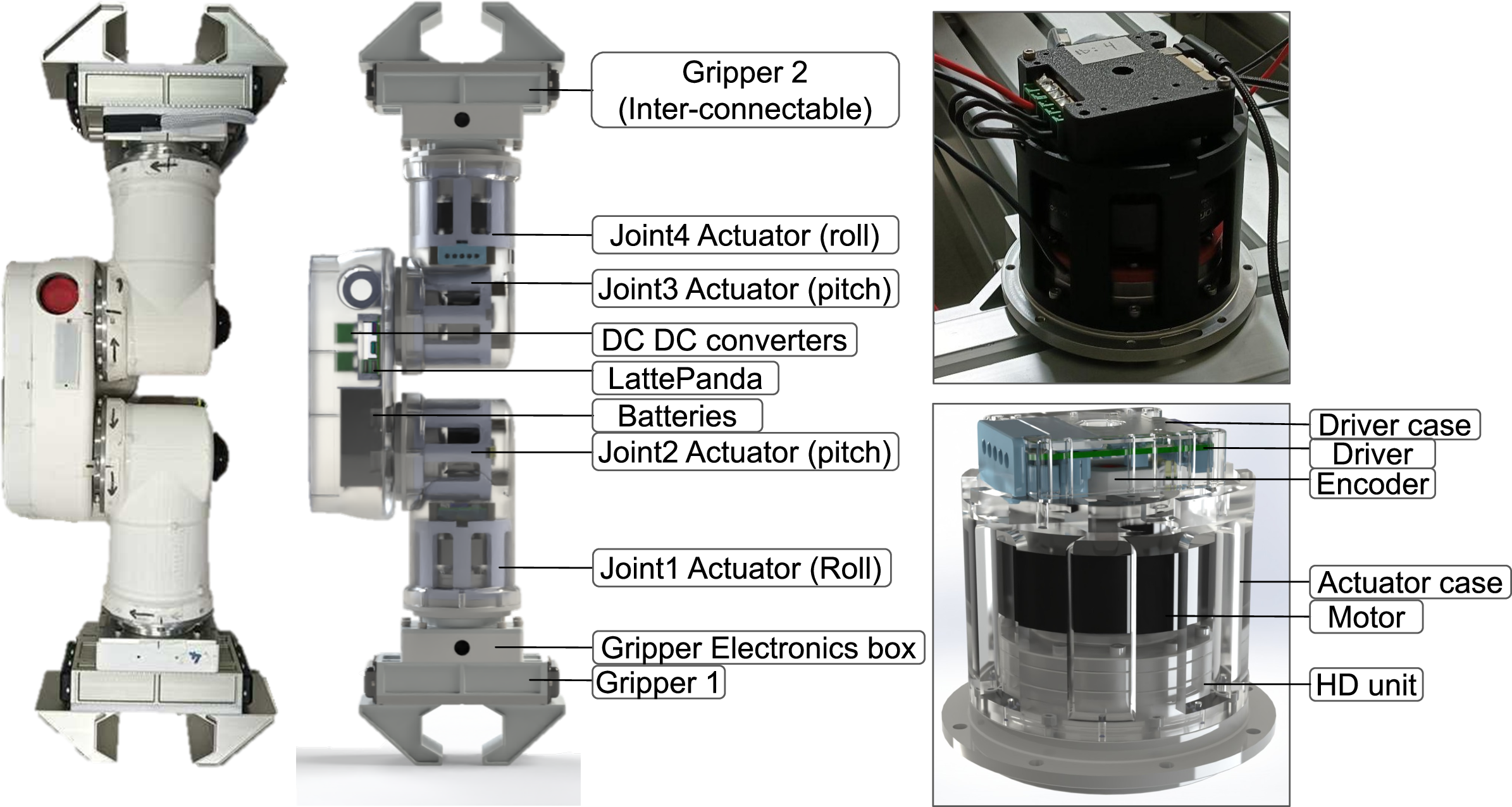
The team created a 4-DOF limb. DOF stands for “degrees of freedom,” which you can think of as the number of joints that can move. A 4-DOF limb has four joints, like a simple arm that can twist and bend in different directions.
They designed the system with a few key ideas:
- Hardware (the physical parts):
- Actuators: These are like the limb’s “muscles.” Each actuator uses:
- A brushless motor similar to those in drones (light, powerful, quick to speed up).
- A special gearbox called a harmonic drive that trades speed for strength (like using a lower gear on a bicycle to climb a hill). This lets the joint lift or hold heavy loads precisely.
- Sensors (encoders) that tell the system the exact position of each joint.
- Gripper: A strong, repeatable “hand” that lets limbs lock onto each other or onto wheel modules, like snapping Lego bricks together.
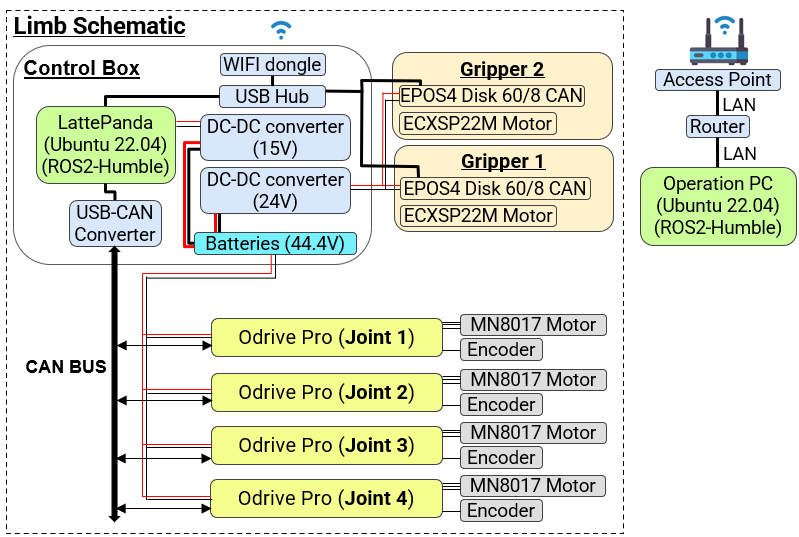
- Power and brain: Batteries and a small onboard computer that talk to all the motors, plus a simple stop switch for safety.
- Software (the “brain” and how it communicates):
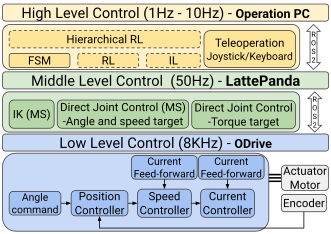
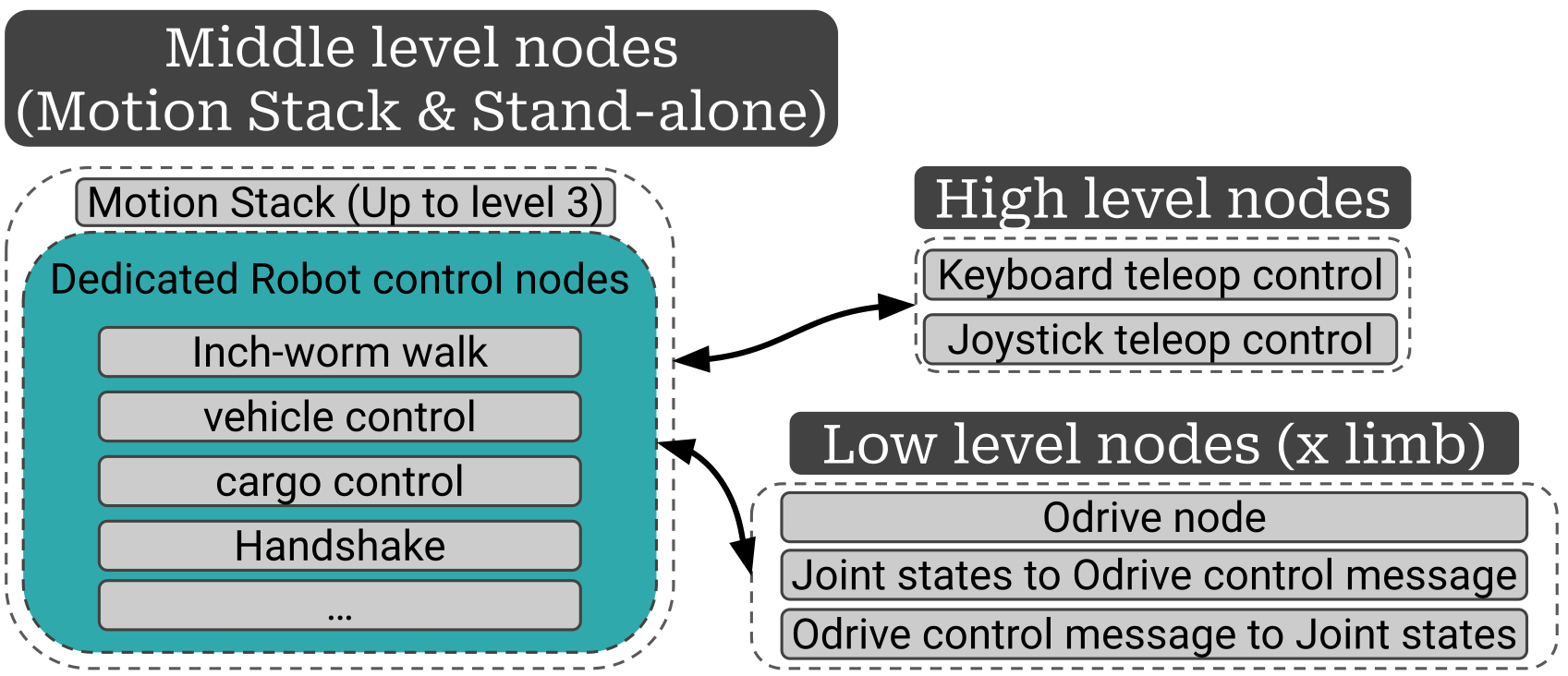
- They used ROS 2, a common robot software system, to organize control in three layers:
- Low level: Talks to the motors very fast and keeps them stable.
- Middle level: Converts “move this joint” or “put the hand here in space” into the right joint angles (this is called inverse kinematics — like figuring out how your shoulder, elbow, and wrist should move so your hand reaches a doorknob).
- High level: Lets a human drive it with a joystick/keyboard now, and will support learning-based control (like reinforcement learning) in the future.
- Tests (to see if it really works):
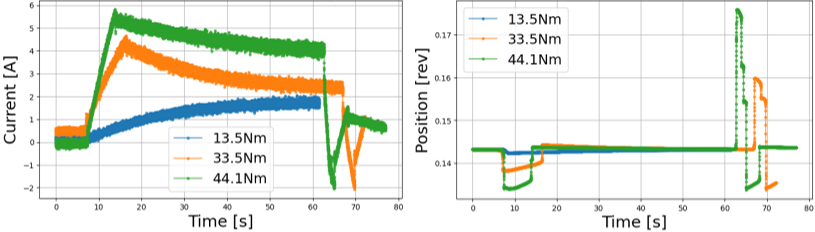
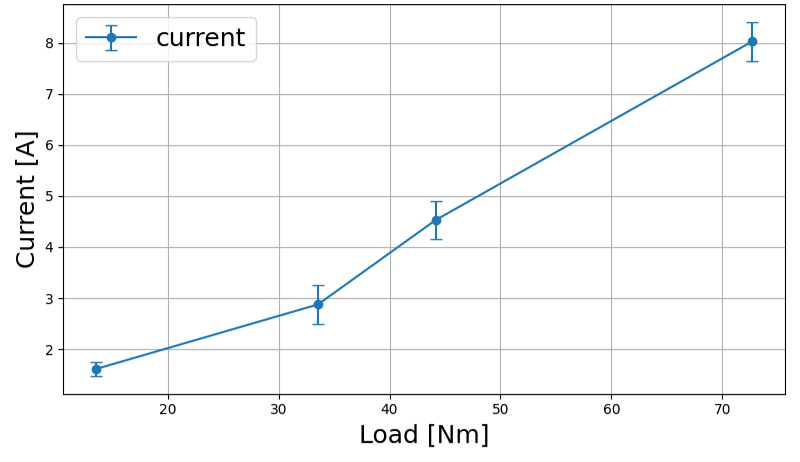
- Static load test: They hung weights on a joint to see how much it could hold without slipping and how much current (effort) it needed.
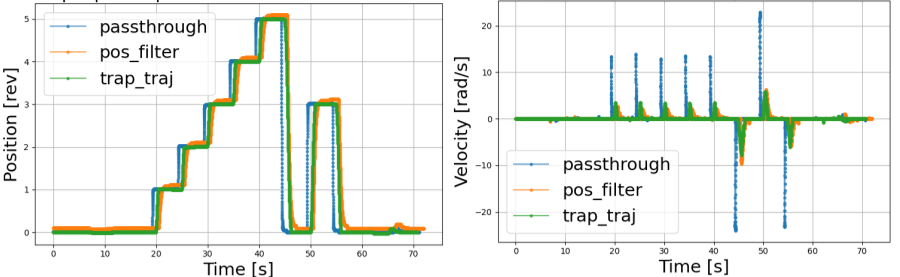
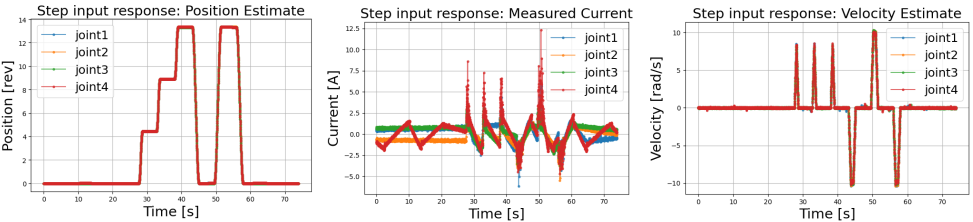
- Step response test: They told joints to move from point A to point B and watched how smooth and fast the motion was. They tried different motion styles and chose the one with gentle start/stop slopes (called a “trapezoidal trajectory”) because it was smooth and safe.
- Multi-joint tests: They moved all joints at once to see if they stayed in sync.
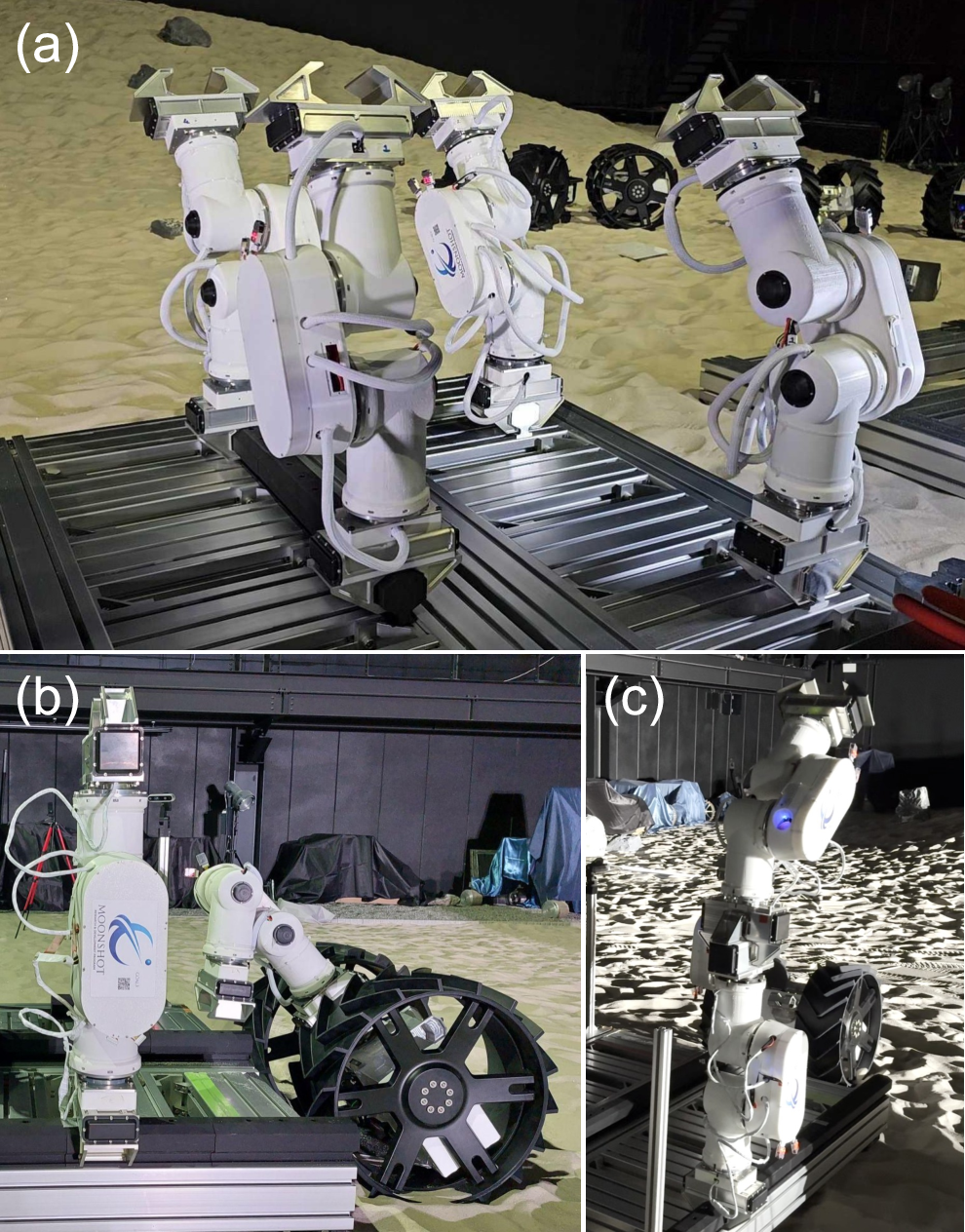
- Real-world assembly and driving: They snapped modules together and drove on sand, changed shapes, and carried a payload.
What did they find, and why is it important?
- Strong, precise joints: Each joint could hold high torques (over 75 Nm) and still keep position very well, even with heavy loads. That means the limbs can lift, hold, and move reliably.
- Smooth control: The “trapezoidal” movement mode gave smooth motions without nasty speed spikes, which protects parts and saves energy.
- Works together well: Multiple joints moved together without losing sync, and the limbs reached target positions quickly and smoothly.
- Many shapes from the same parts: Using just the limbs and wheel modules, they demonstrated nine configurations. Here are the most important ones:
- 4-DOF limb: A single limb that can act as a small arm or connector.
- 8-DOF limb: Two limbs combined into a longer, more flexible arm.
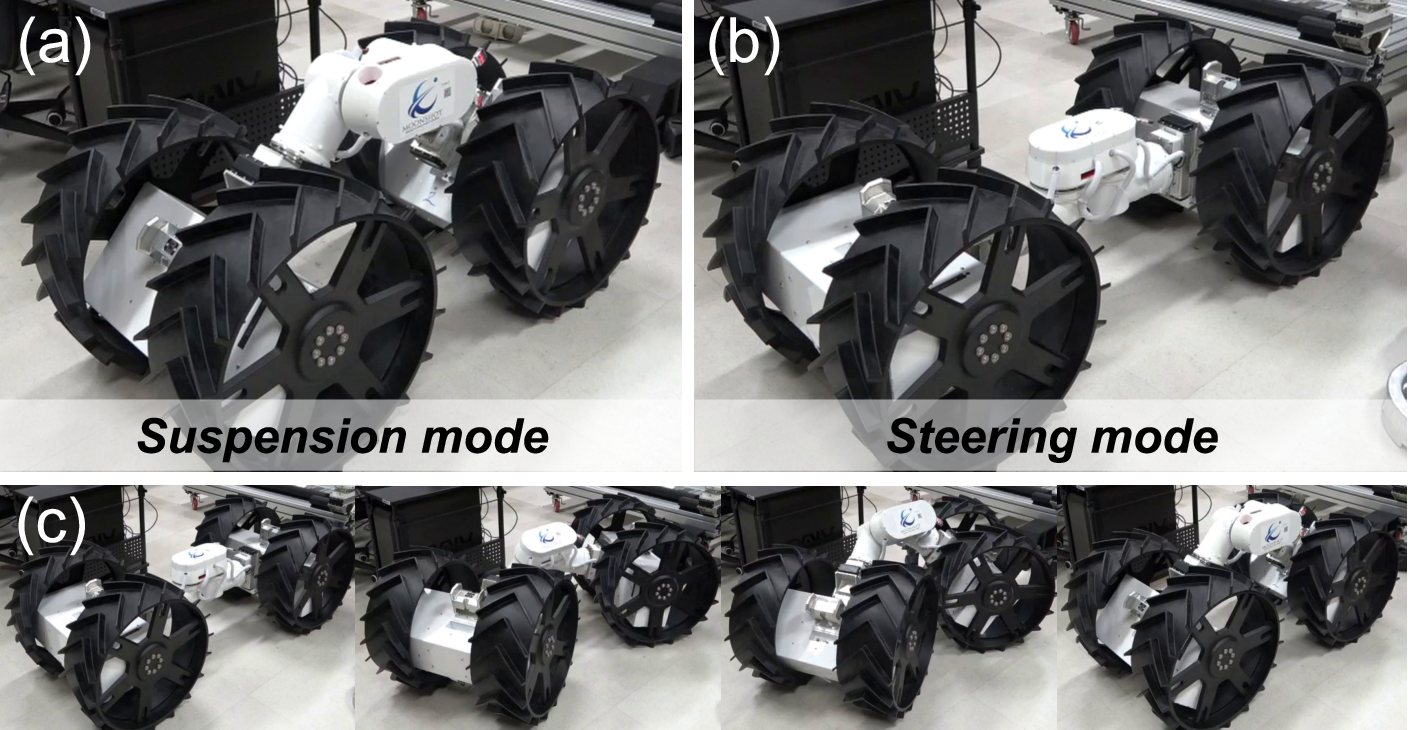
- Vehicle: Two wheel modules connected by one limb; it can switch between “suspension” mode (softer ride over bumps) and “steering” mode (turning).
- Dragon: A vehicle plus one extra limb, good for moving and manipulating objects at the same time.
- Quadruped: Four limbs acting like legs for tough, uneven terrain.
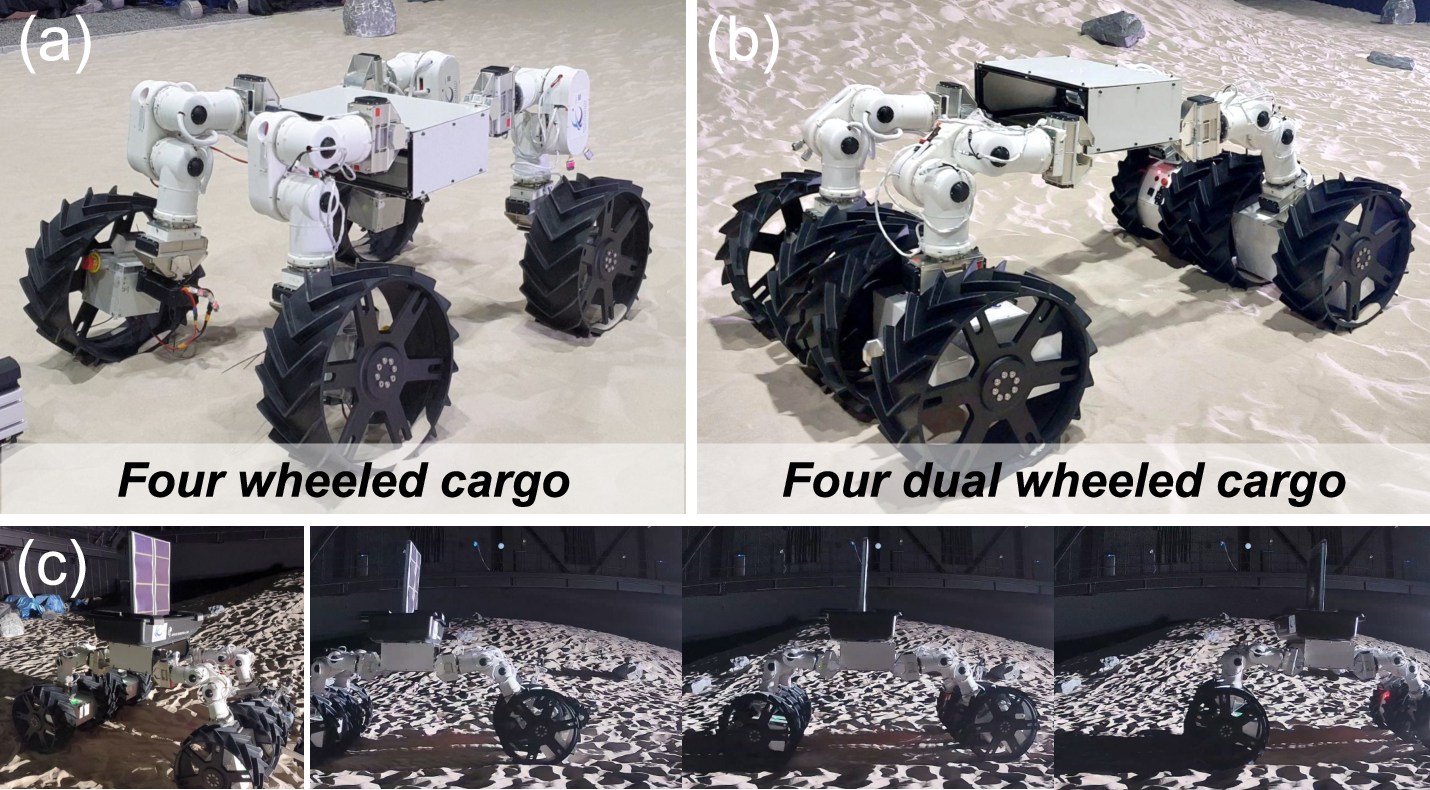
- Cargo (and cargo-minimal): Limbs plus wheels carrying a platform; they moved a sled with a solar panel mock-up and reached speeds up to about 1.0 m/s on sand.
- Minimal/Spinbot/Bike: Resource-saving or narrow-passage modes for tight spaces; Bike will use balance control (like a person balancing on a bike) in future updates.
Why this matters: On the Moon, missions need to build bases, carry equipment, and explore. Bringing many different robots is expensive. A “kit” of strong, smart, snap-together modules lets teams build the robot they need on the spot — a fast rover one day, a heavy lifter the next, and a walking robot for rough ground after that.
What’s the bigger impact, and what’s next?
This work shows a practical path toward “do-it-all” space robots:
- Flexibility: One set of parts can become many different robots, saving mass, cost, and time.
- Reliability and maintainability: Using a common actuator (the same “muscle” everywhere) simplifies repairs and spare parts.
- Real-world readiness: The system handled heavy loads and worked on sandy, uneven terrain, which is similar to lunar soil.
Next steps:
- Make shape-changing (reconfiguration) more automatic, not just human-controlled.
- Add better sensing and smarter software (like reinforcement learning) so the robots can handle new tasks and tricky environments on their own.
- Finish balance control for modes like the Bike configuration.
In short, the team built strong, snap-together robot limbs and wheels that can quickly turn into the right robot for the job. That kind of flexibility could make future lunar exploration and construction faster, cheaper, and much more capable.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, concrete list of what remains missing, uncertain, or unexplored in the paper, phrased to guide follow-on research.
- Environmental robustness for lunar deployment is unvalidated: no tests or analysis for vacuum, radiation, abrasive dust/regolith, and thermal extremes on motors, encoders, ODrive drivers, LattePanda SBC, batteries, cables, seals, and grippers.
- Lubrication and materials compatibility in vacuum are unaddressed, including harmonic drive grease selection/longevity, bearing lubrication for outrunner motors, adhesive outgassing, and dust ingress protection for gearboxes and grippers.
- Thermal management is uncharacterized: actuator/driver heat generation, conduction/radiation paths in vacuum, thermal gradients across modules, and thermal control hardware (heat straps, radiators) are not analyzed or tested.
- Power system viability on the Moon is unclear: LiPo behavior in extreme temperatures, battery protection/BMS in vacuum, charge strategy (e.g., solar integration), energy regeneration handling, and pack balancing/health monitoring are not presented.
- No quantitative runtime or power budget is provided per configuration/task; energy consumption per meter, per manipulation action, and per reconfiguration event remains unknown.
- Inter-module power/data passthrough is not described; it is unclear whether connections enable shared power distribution, hot-swap, or common data buses across assembled morphologies.
- Communication architecture is non-space-ready (Wi‑Fi to PC, USB dongles): no plan/results for radiation-tolerant radios, time-delay/disruption tolerance, bandwidth limits, or lunar surface networking.
- Distributed control and synchronization across multiple limbs/modules (time sync, clock drift, deterministic scheduling, DDS configuration) are not analyzed or validated under load and packet loss.
- Fault tolerance and safety are not covered: no joint brakes or safe-hold strategy on power loss, no ST0/safe torque off strategy, limited discussion of E‑stop behavior across configurations, and no fault isolation/health monitoring scheme.
- Long-duration reliability is unknown: no endurance, thermal cycling, dust exposure, or wear tests for actuators, grippers, connectors, or harnesses; fatigue and backlash evolution are unreported.
- Mechanical robustness to launch/shock/vibration is unassessed; no structural analysis (FEA), margins, or qualification plan for flight loads is given.
- Connector/gripper performance lacks quantification: alignment tolerances, capture envelopes, required approach accuracy, retention/holding forces, power-off latching, failure rates, and recovery from partial grasps are not reported.
- Autonomous reconfiguration is not implemented; perception for docking (fiducials vs vision/LiDAR), pose estimation, compliant insertion, error detection/retry policies, and planning for sequence/ordering remain open.
- Perception and navigation stack is missing: no on-board cameras/LiDAR/IMU integration, SLAM/localization under GNSS-denied conditions, terrain mapping, slip estimation on regolith, or state estimator for whole-body control.
- Control remains teleoperation-centric; autonomous locomotion/manipulation (gait generation, model predictive/whole-body control, constrained IK, redundancy resolution for 8‑DOF arms) is not demonstrated.
- Force/torque control and compliant contact behaviors are absent; there are no torque sensors or series elasticity, and no experiments in contact-rich tasks (assembly, grasping on rough terrain).
- Bike mode requires an IMU-based balance controller, which is currently under development; the stability and control limits for narrow-passage traversal are unknown.
- Quadruped locomotion is not quantitatively evaluated: no gaits, speed/efficiency, stability margins, slope/step capability, or terrain robustness (e.g., sinkage/slip on regolith simulant) are reported.
- Wheeled mobility performance lacks system-level metrics: turning radius, maximum slope, drawbar pull/tractive effort, sinkage/slip models, obstacle negotiation, and path tracking are unmeasured.
- Cargo/payload capability is not quantified: maximum payload mass, center-of-mass constraints, dynamic stability when accelerating/braking, and speed vs payload trade-offs are missing.
- Comparative performance across configurations is not analyzed: energy per unit distance, task throughput, reconfiguration time/success rate, and efficiency vs complexity are unreported.
- Workspace and dexterity of the 4‑DOF limb (roll–pitch–pitch–roll) are not characterized: reachable workspace, manipulability, isotropy, singularity maps, and trade-offs vs the prior 3‑DOF design are absent.
- Actuator characterization is limited: continuous torque vs temperature, thermal derating, efficiency maps, friction/cogging, backlash/hysteresis over time, and load-induced bandwidth limits are not measured.
- Control-mode choice (trapezoidal trajectory) lacks robustness analysis across varying loads/inertias; no feedforward, friction compensation, or adaptive gains/system ID are presented.
- Mass and inertia properties of modules/assemblies are not provided, hindering dynamic modeling, whole-body control, and mission-level logistics planning.
- CAN bus robustness (within-limb) and any inter-module bus (if present) are not evaluated under EMI/EMC, high-current switching noise, cable faults, or dust-contaminated connectors.
- Standards and interoperability are unclear: no specification of mechanical/electrical/data interface standards to enable third-party modules or cross-team integration.
- Autonomy under communication delay (Moon–Earth latency) is unaddressed: teleop UI, supervisory autonomy, and safety under intermittent links remain open issues.
- Reconfiguration planning at the system level is unspecified: selecting morphologies for tasks/terrain, optimizing sequences, and verifying stability during intermediate states are not explored.
- Failure recovery strategies are missing: what happens after a failed dock, a stuck gripper, a dead joint, or a lost module; no self-rescue or degraded-mode operation is described.
- Environmental contamination control is unaddressed: dust mitigation for moving interfaces, seals, wipers, positive-pressure purging, and cleanliness maintenance during repeated docking.
- Verification in lunar-relevant regolith simulants is minimal: only qualitative sand-field demos are shown; no controlled studies with standardized simulants or repeatable protocols.
- Space-grade component pathway is unspecified: how ODrive, LattePanda, encoders, and wiring will be replaced or ruggedized for TRL advancement is not outlined.
- Charging/replenishment logistics are open: autonomous docking to chargers, in-field energy sharing, and integration with surface power (e.g., solar farms) are not detailed.
- Security and resilience of the ROS 2 stack are unexamined: DDS security, node isolation, watchdogs, and recovery from process crashes in remote environments are not discussed.
Practical Applications
Immediate Applications
The following applications can be deployed now based on the paper’s validated hardware (4-DOF limbs and wheel modules), unified actuator design (>75 Nm torque, trapezoidal trajectory control), ROS 2 software stack, and demonstrated configurations (vehicle, dragon, quadruped, cargo, spinbot, bike).
- Modular field robotics for analog lunar construction rehearsals
- Sector: robotics, space, construction
- Use case: Assemble mobile manipulators (dragon) and cargo platforms to transport and position mock-up structures (e.g., solar panel sled) in desert/sand fields; validate assembly sequences (handshake, limb-to-wheel).
- Tools/products/workflows: “Moonbot Reconfiguration Sequence Library” (predefined IK/trajectory scripts), ROS 2 Motion-Stack integration; actuator test kit; pallet-based assembly staging.
- Assumptions/dependencies: Access to terrestrial test sites; COTS electronics (ODrive, LattePanda) acceptable in air; teleoperation over local Wi-Fi/LAN; payloads sized within demonstrated limits; dust not as severe as lunar regolith.
- Rapid prototyping of reconfigurable mobile manipulators in industrial testbeds
- Sector: manufacturing, utilities, logistics
- Use case: Reconfigure a vehicle-suspension or vehicle-steering mode for moving parts/tools across shop floors; switch to 8-DOF manipulator for reach/precision tasks.
- Tools/products/workflows: Standardized actuator and genderless connectors; ROS 2 multi-joint synchronization (Motion-Stack); interchangeable wheel/limb modules for heterogeneous tasks.
- Assumptions/dependencies: Flat indoor terrain; safety interlocks and E-stop integrated; compliance with facility safety standards.
- Solar farm operations and maintenance in sandy or uneven terrain
- Sector: energy
- Use case: Cargo configuration with dual-wheel modules to carry tools and components; dragon configuration to perform light manipulation (e.g., wiping panels, toggling switches).
- Tools/products/workflows: Active suspension via middle pitch joints; IK-based teleoperation; modular limb gripper for standardized fixtures on O&M equipment.
- Assumptions/dependencies: Terrain passable for wheels; mild environmental exposure; payloads kept within ~1 m/s dynamic stability envelope.
- Hazardous site inspection and light intervention
- Sector: mining, nuclear decommissioning (non-radiation-critical zones), disaster response
- Use case: Spinbot for constrained spaces; quadruped mode for uneven rubble traversal; vehicle mode for rapid transit between inspection points.
- Tools/products/workflows: Multi-mode switch between steering/suspension; joystick/keyboard teleoperation; standardized gripper fixtures for sampling tools.
- Assumptions/dependencies: Human-in-the-loop control; minimal need for high-autonomy; electronics not yet radiation-hardened; dust sealing sufficiency for short missions.
- Academic research platforms for modular/reconfigurable robotics
- Sector: academia, education
- Use case: Benchmarking reconfiguration strategies; teaching IK, multi-joint synchronization, actuator characterization; testing learning-based control on validated hardware.
- Tools/products/workflows: ROS 2 packages (odriverobotics/ros_odrive), Motion-Stack; step-response and static-load test procedures; configuration repertoire (vehicle, dragon, cargo, quadruped).
- Assumptions/dependencies: Lab infrastructure; student teleoperation; wheels/fixtures available; curriculum integration.
- Curriculum and maker education kits for advanced robotics courses
- Sector: education, maker communities
- Use case: Modular limb kits to teach high-torque actuation, FOC control, CAN bus networking, ROS 2-based IK and trajectory planning; tangible demonstration of reconfigurable morphologies.
- Tools/products/workflows: “Modular Limb Education Pack” with actuator, gripper, ROS 2 nodes; example lesson plans for step-response tuning and IK targets.
- Assumptions/dependencies: Instructor support; safe battery handling; budget for modules.
- On-site logistics augmentation for construction pilots
- Sector: construction, logistics
- Use case: Cargo-minimal or cargo configurations to move small payloads (tools, sensors) on partially prepared sites; switch to dragon mode when manipulation is needed.
- Tools/products/workflows: Quick reconfiguration workflow (lift, connect, grasp-close sequence); standardized fixtures on payload sleds.
- Assumptions/dependencies: Ground-level stability; gripper alignment to fixtures; training for operators.
- Teleoperation training and human-robot teaming
- Sector: space operations, defense
- Use case: Practice teleop on ROS 2 with IK and trajectory control; evaluate operator workload across morphologies; develop SOPs for reconfiguration.
- Tools/products/workflows: High-level joystick/keyboard nodes; mission playbooks for limb-to-limb handshake; performance logs for operator feedback.
- Assumptions/dependencies: Reliable local comms; users trained in safety procedures.
- Standardized actuator adoption in robotics labs and startups
- Sector: robotics, hardware manufacturing
- Use case: Drop-in high-torque actuator assemblies for custom arms/legs; leverage harmonic drive + BLDC outrunner + ODrive FOC stack for compact, precise joints.
- Tools/products/workflows: “Moonbot Actuator Pack” specifications; step-response tuning via trapezoidal trajectory mode; CAN bus daisy-chaining example.
- Assumptions/dependencies: Acceptance of COTS drivers; availability of HD CSD-25 gearboxes; mechanical integration per project needs.
Long-Term Applications
These applications require further research, environmental hardening, autonomy, standardization, or scaling for operational deployment—especially in vacuum, radiation, and extreme thermal conditions on the Moon.
- Autonomous modular construction and assembly on the Moon
- Sector: space, construction
- Use case: Self-assembling robots that build habitat infrastructure, solar arrays, and trusses; switch between quadruped, vehicle, and manipulator morphologies autonomously.
- Tools/products/workflows: Reinforcement learning for reconfiguration; robust sensing suites; fault-tolerant ROS 2; standardized lunar fixtures and connectors.
- Assumptions/dependencies: Vacuum-compatible materials, radiation-hardened electronics, thermal management, dust-proof seals; power distribution on-site; high-reliability comm links.
- Standardized inter-module interface across agencies and vendors
- Sector: policy, industry, space
- Use case: A connector and control protocol (genderless, monogamous coupling) adopted as a standard for lunar robotic ecosystems to ensure interoperability.
- Tools/products/workflows: Interface specifications and certification; common mechanical fixtures; API-level control interoperability (ROS 2 profiles).
- Assumptions/dependencies: International collaboration; standards bodies participation; IP/licensing agreements.
- Lunar logistics (ISRU support and payload transport)
- Sector: space, mining
- Use case: Cargo configurations for regolith hauling, feedstock transport to ISRU plants; dynamic suspension for uneven regolith; manipulators for tool exchange.
- Tools/products/workflows: Mission planning toolchains; maintenance workflows with swappable modules; dust-mitigating connectors.
- Assumptions/dependencies: Scalable power sources; regolith-resistant drivetrain; autonomous navigation.
- Mobile manipulation for remote infrastructure maintenance (Earth and Moon)
- Sector: energy, utilities, telecom
- Use case: Inspect and service remote assets (antennae, solar arrays, valves) using reconfigurable mobile manipulators that adapt morphology to task/environment.
- Tools/products/workflows: Perception-driven morphology selection; centralized fleet management; modular spares logistics.
- Assumptions/dependencies: Robust perception and IMU-balancing (bike mode); safety and regulatory approvals; weatherproofing.
- Disaster response with adaptive robot teams
- Sector: public safety, defense
- Use case: Teams of modular robots that reconfigure to traverse debris (quadruped), move quickly (vehicle), and manipulate objects (dragon) based on mission phase.
- Tools/products/workflows: Multi-robot coordination; autonomy to switch morphologies; rapid deployment kit with standardized fixtures.
- Assumptions/dependencies: Reliable communications in degraded environments; operator training; ruggedization.
- Deep-sea and polar exploration variants
- Sector: marine, climate research
- Use case: Adapt the modular architecture for underwater or icy terrains; reconfigure for locomotion/manipulation in constrained and extreme environments.
- Tools/products/workflows: Pressure-rated housings; marine-grade connectors; specialized end-effectors.
- Assumptions/dependencies: Environmental sealing; alternative drivetrains; materials testing.
- Autonomous reconfiguration and learning-based control
- Sector: software, AI, robotics
- Use case: RL-driven morphology selection, connector alignment, and sequence execution; self-healing configurations when modules fail.
- Tools/products/workflows: Simulation-to-field training pipelines; perception and state estimation for connector alignment; Motion-Stack extensions.
- Assumptions/dependencies: High-quality datasets; sim-to-real transfer; safe exploration policies.
- Lunar teleoperation from cislunar assets (Gateway) and Earth
- Sector: space operations
- Use case: Low-latency teleop from lunar orbit; higher-latency supervisory control from Earth with autonomous primitives executing reconfiguration sequences.
- Tools/products/workflows: Human-in-the-loop control toolkits; autonomy “chunks” for IK and connector engagement; mission dashboards.
- Assumptions/dependencies: Communications infrastructure; trust in autonomous behaviors; operator training standards.
- Modular robotics supply chains and maintenance ecosystems
- Sector: industry, logistics
- Use case: Field-replaceable modules with unified actuators and connectors for rapid repair/upgrade; spares pools shared across missions/projects.
- Tools/products/workflows: Digital twins for configuration tracking; automated health monitoring via CAN and ROS 2; standardized packaging for modules.
- Assumptions/dependencies: Procurement policies supporting modularity; inventory management systems; quality control.
- Reconfigurable assistive robots for difficult terrestrial terrains
- Sector: agriculture, forestry, geotechnical surveying
- Use case: Morphology switching for traversing soft soils, slopes, and underbrush; cargo mode for moving sensors or small loads; manipulator mode for sample collection.
- Tools/products/workflows: Terrain classification to select gait/mode; ruggedized wheel/leg modules; interchangeable end-effectors.
- Assumptions/dependencies: Weatherproofing; autonomy for navigation; safety.
- Standards and certification frameworks for modular robot safety
- Sector: policy, certification
- Use case: Define safety rules for reconfiguration (e.g., gripper engagement verification, E-stop handling, current limits, trajectory smoothing).
- Tools/products/workflows: Test suites based on actuator step-response and load tests; compliance documentation templates.
- Assumptions/dependencies: Engagement of standards bodies; industry feedback; incident reporting mechanisms.
- Commercial productization of high-torque modular actuators and connectors
- Sector: robotics hardware
- Use case: Offer compact actuator modules (HD + BLDC + ODrive + encoders) and genderless grippers as catalog components for mobile manipulators and legs.
- Tools/products/workflows: Manufacturing scale-up; reliability testing; integration guides for ROS 2 and CAN.
- Assumptions/dependencies: Supply chain stability; long-term support; environmental certifications (dust, shock, vibration).
Glossary
- Active suspension: A control approach where actuators adjust wheel or body positions to absorb terrain disturbances and maintain stability. "Vehicle suspension mode (a), in which the limbâs middle pitch joints adjust wheel spacing and provide active suspension,"
- Backlash: Mechanical play between mating parts in a transmission that can cause positioning error; reducing it improves precision. "Actuation method: joint-based actuation with high accuracy and minimal backlash."
- BLDC outrunner motor: A brushless DC motor whose rotor surrounds the stator, offering high torque at low speeds and fast acceleration. "a brushless DC (BLDC) outrunner motor"
- CAN bus: A robust, multi-node automotive/industrial communication network used for real-time control. "All motor drivers are connected via a daisy-chained CAN bus,"
- Capacitive encoder: A position sensor that uses changes in capacitance to measure angular position, often resilient to dust and vibration. "Encoder & \begin{tabular}[c]{@{}l@{}Capacitive,\ Same Sky\ (CUI devices)\end{tabular}"
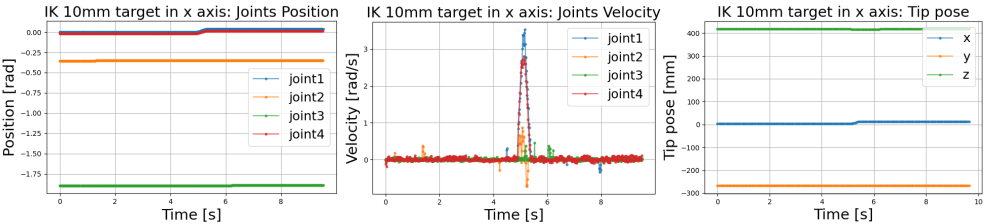
- Cartesian pose: A robot’s position and orientation expressed in a Cartesian coordinate frame. "Finally, the IK mode was tested by sending Cartesian pose targets along individual axes."
- Degrees of Freedom (DOF): Independent joint or motion axes a robot can control to move or manipulate. "Developed four degree-of-freedom (DOF) modular limbs arranged on a palette."
- Duralumin: A strong, lightweight aluminum alloy commonly used in aerospace structures and housings. "HD\ Housing\end{tabular} & Custom, HERO Lab. & Duralumin"
- Field-Oriented Control (FOC): A motor control technique that regulates torque and flux in the motor’s rotating frame for smooth, efficient actuation. "ODrive motor drivers, which implement nested FOC controllers operating at \SI{8}{\kilo\hertz}."
- Functionally reconfigurable: A system that adapts task-level functionality by rearranging modules without major structural redesign. "This qualifies the architecture as functionally reconfigurable, allowing task-level adaptation through module rearrangement rather than extensive structural redesign."
- Genderless connector: A mechanical/electrical interface that does not require male/female pairing, enabling symmetric coupling. "For limb-to-limb connections, the interface is genderless, enabling symmetric, bidirectional coupling."
- Harmonic Drive: A strain-wave gear transmission offering high reduction ratios with precision and compactness. "A Harmonic Drive CSD-25-160-2A-GR was employed for its high precision and torque density."
- Heterogeneous robotic architecture: A system composed of different types of modules (e.g., limbs and wheels) that work together. "macro-modular, heterogeneous robotic architecture composed of 4-DOF limb modules and wheel modules,"
- IMU (Inertial Measurement Unit): A sensor that measures accelerations and angular rates for balance, navigation, and control. "The bike mode requires an inertial measurement unit (IMU)-based balance controller,"
- Inchworm motion: A grasp–release locomotion routine that incrementally shifts a module across fixtures. "Specific routines implemented in the middle level include inchworm motion (pallet-top displacement via grasping fixtures),"
- Inverse kinematics (IK): The computation of joint angles required to reach a desired end-effector pose. "Reconfiguration... by executing pre-defined joint trajectories and IK commands."
- Lattice-like structure: A modular robot design where actuators sit at fixed grid positions, enabling systematic assembly. "Structure: lattice-like, with actuators in fixed positions;"
- LiPo battery: A lightweight, high-discharge lithium polymer battery commonly used in robotics and UAVs. "two 6S \SI{2400}{mAh} LiPo batteries connected in series."
- Lunar regolith: The loose, granular surface material covering the Moon, affecting locomotion strategies. "a wheeled vehicle for efficient travel over flat lunar regolith,"
- Macro-scale modules: Larger modular units intended for high payloads and field deployment, as opposed to micro-scale units. "Form factor: macro-scale modules."
- Macro-modular: A design approach using relatively large, self-contained modules that can be reassembled for different tasks. "Development of a macro-modular, heterogeneous robotic architecture composed of 4-DOF limb modules and wheel modules,"
- Monogamous connector: A coupling that forms only one simultaneous link, simplifying structural constraints. "Connector type: monogamous, with each connector forming a single link at a time."
- Motion-Stack (MS) framework: A control framework supporting synchronized multi-joint and IK-based control for modular robots. "the Motion-Stack (MS) framework~\cite{ms_api}, which supports synchronized multi-joint and IK-based control."
- ODrive motor driver: A high-performance open-source BLDC motor controller supporting position, velocity, and current modes. "ODrive motor drivers, which implement nested FOC controllers"
- Outrunner motor: A BLDC motor variant where the rotor spins around the stator, yielding higher torque at lower RPM. "Outrunner motors, typically used in UAVs, were chosen for its low weight, high torque at low rotational speeds,"
- Passthrough mode: A motor control mode where setpoints are applied directly without trajectory shaping or filtering. "The tested modes were passthrough, position filter, and trapezoidal trajectory."
- Payload capacity: The maximum load a robot or actuator can carry or sustain while maintaining performance. "The objective of this test was to determine the maximum payload capacity of the actuators when maintaining a fixed position."
- Position filter: A control mode that smooths position commands to reduce velocity spikes and oscillations. "The tested modes were passthrough, position filter, and trapezoidal trajectory."
- Reduction ratio: The gear ratio between input and output that determines speed reduction and torque amplification. "Reduction ratio: 1:160"
- Regenerated energy: Energy recovered during braking that can be absorbed or reused by the system. "enabling the absorption of regenerated energy during active braking."
- ROS 2: A middleware framework for robotic software that provides communication, control, and tooling for distributed systems. "ROS~2 serves as the core middleware for control and communication."
- RS485/SSI: Industrial serial communication interfaces used for robust encoder data transmission. "Comm. Interface: RS485/SSI"
- Singular configurations: Robot poses where the kinematic Jacobian loses rank, leading to loss of controllable directions and large joint motions. "The limb was positioned away from singular configurations before testing."
- Strain-wave speed reducer: A compact, high-ratio gearing mechanism (harmonic drive) using elastic deformation to transmit motion. "a strain-wave speed reducer"
- Step response: The system’s transient behavior when subjected to a sudden change in command, used to assess control performance. "Position control step response experiments under different loads and control modes."
- Teleoperation: Remote control of a robot via human inputs such as joystick or keyboard. "High level: Currently supports joystick and keyboard teleoperation,"
- Torque density: Torque per unit mass or volume, indicating how much torque a compact actuator can deliver. "A Harmonic Drive... was employed for its high precision and torque density."
- Torque-to-speed ratio: A characteristic of actuators describing the balance between torque output and rotational speed. "a common actuator characterized by a high torque-to-speed ratio,"
- Trapezoidal trajectory mode: A motion profile with constant acceleration, constant velocity, and constant deceleration phases for smooth moves. "the trapezoidal trajectory mode was selected for subsequent limb operation."
- UAVs: Unmanned Aerial Vehicles; referenced here as typical applications for outrunner motors. "Outrunner motors, typically used in UAVs,"
- USB–CAN converter: An interface device that bridges USB from a computer to a CAN bus for motor/robot communication. "which interfaces with the LattePanda through a USBâCAN converter."
Collections
Sign up for free to add this paper to one or more collections.