- The paper introduces a collaborative reconstruction and repair framework that mitigates the decoder’s identity mapping issue by repairing synthetic anomaly features.
- It applies feature-level random masking and segmentation-driven fusion to enhance pixel-level localization across diverse industrial settings.
- The framework achieves state-of-the-art performance on benchmarks like MVTec-AD, VisA, Real-IAD, and HSS-IAD with high precision and robustness.
Collaborative Reconstruction and Repair for Multi-class Industrial Anomaly Detection: An Expert Analysis
Introduction and Motivation
Multi-class industrial anomaly detection (MIAD) presents a challenging open-set scenario where the objective is to concurrently detect and localize out-of-distribution (OOD) patterns across diverse object categories, using only normal training data. Classical approaches usually require a separate model per category, which significantly increases memory and deployment costs—an impractical prospect for real-world industrial applications. Recent unified frameworks have attempted to train one model across all categories, but existing reconstruction-based methods often encounter the "identity mapping" problem, where the decoder generalizes excessively and reconstructs input features with little discrimination, undermining anomaly localization.
Collaborative Reconstruction and Repair (CRR) Framework
The proposed CRR framework innovatively addresses the identity mapping problem by operationalizing anomaly localization as a collaborative process of reconstruction and repair. The decoder is not merely trained to reconstruct normal samples, but is also compelled to repair synthesized anomaly features, driving those representations back into the normal manifold. This fundamental shift ensures feature discrepancies between encoder and decoder become informative cues for OOD regions, while maintaining similarity for in-distribution features.
The two-stage pipeline includes (1) optimizing the decoder with a combination of normal and synthetically abnormal inputs to enforce output normalization, and (2) refining anomaly localization via a segmentation network trained using the concatenated product of normalized encoder-decoder features.
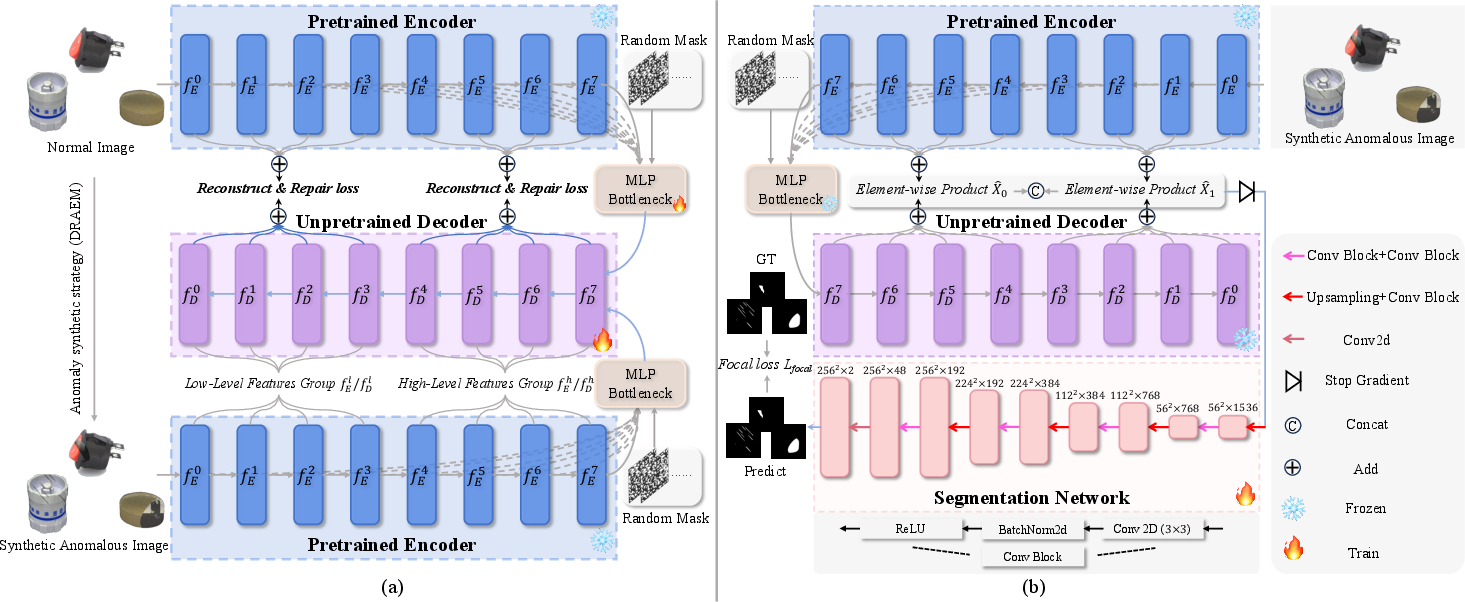
Figure 1: Schematic of the CRR pipeline: collaborative reconstruction/repair with random masking and segmentation-driven learning.
To further avoid overfitting to global image statistics and to strengthen sensitivity to local anomalies, feature-level random masking is performed during training. Random masks applied to the encoder features prevent the decoder from trivially copying local or global contexts, requiring real inference over masked neighborhoods. Masked Generative Distillation plays a central role in this process, improving fine-grained localization.
Segmentation-Driven Anomaly Localization
Unlike prior methods relying on fixed anomaly scores derived from pixel-wise feature discrepancy, CRR includes a lightweight upsampling segmentation network that adaptively fuses multi-level encoder-decoder feature relations. This architecture is optimized via a focal loss, emphasizing difficult foreground anomaly pixels given severe class imbalance. The segmentation head produces pixel-level anomaly masks that are aggregated into refined region-level anomaly maps.
Quantitative and Qualitative Results
CRR establishes new state-of-the-art (SoTA) performance on the MVTec-AD, VisA, Real-IAD, and HSS-IAD benchmarks, dominating both image-level detection and pixel-level localization metrics. For example, on MVTec-AD, image-level AUROC, AP, and F1-max reach 99.7, 99.9, and 99.2, respectively, with pixel-level AUPRO exceeding 95.5. Across more challenging and fine-grained domains such as HSS-IAD and Real-IAD, CRR maintains consistent improvements over leading baselines, particularly in pixel-level AP and F1-max, signifying robust defect perception at industrial scale.
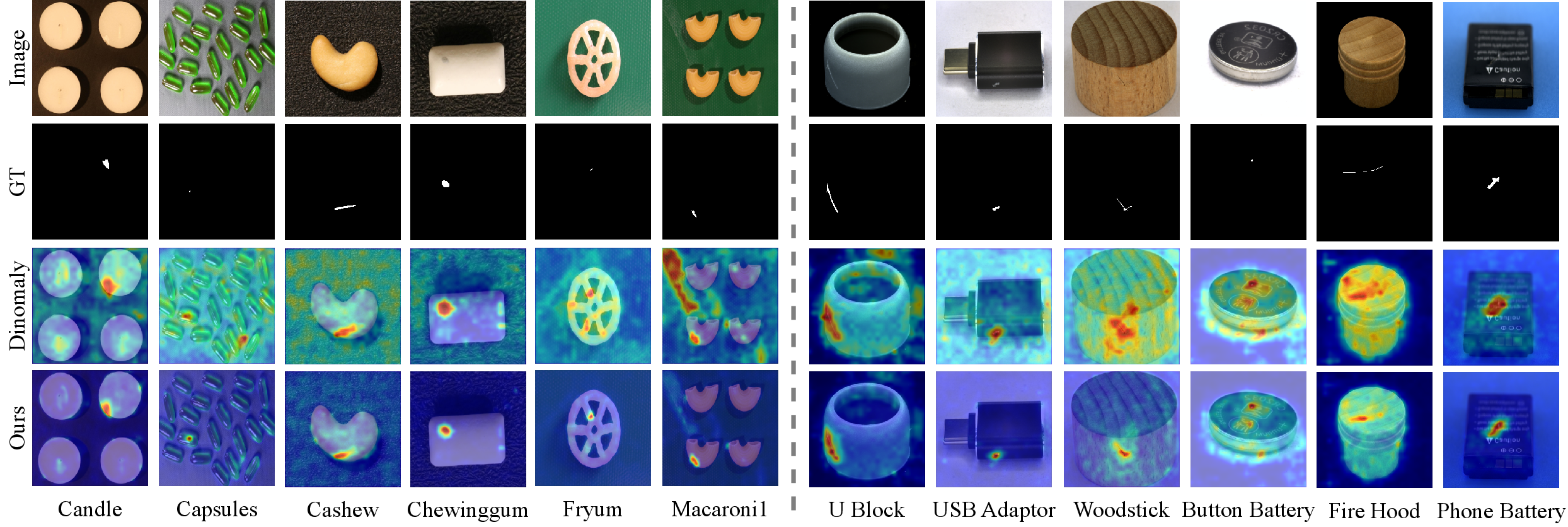
Figure 2: Visual examples of segmentation outputs for anomalies in VisA and Real-IAD, highlighting pixel-accurate localization.
CRR anomaly maps are markedly superior in localization fidelity, with tight outlines on anomalous regions and minimal false positives in challenging backgrounds, as seen in the random sample visualizations.
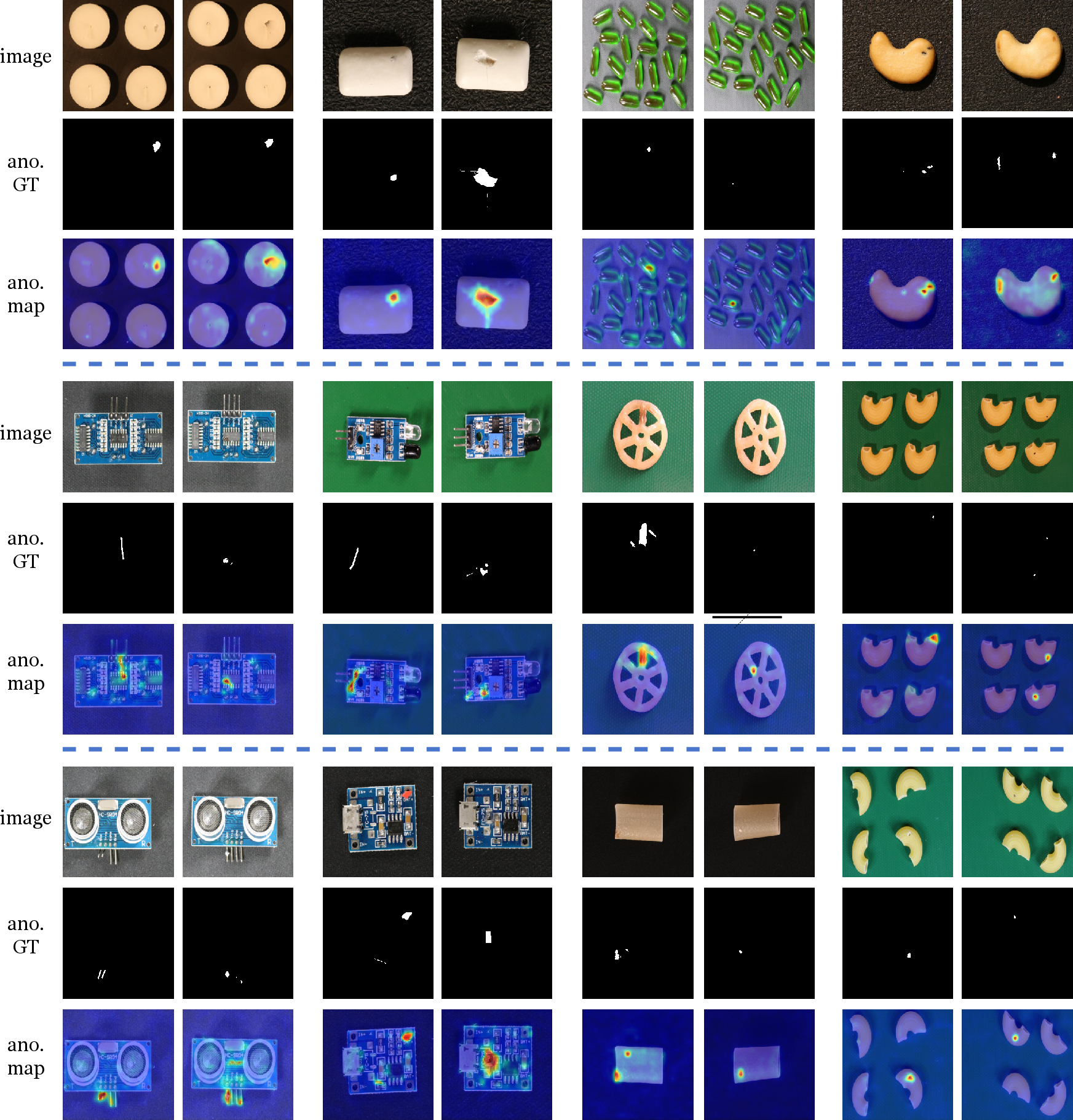
Figure 3: Example CRR anomaly maps on VisA, demonstrating cross-category generalization and high precision at defect boundaries.
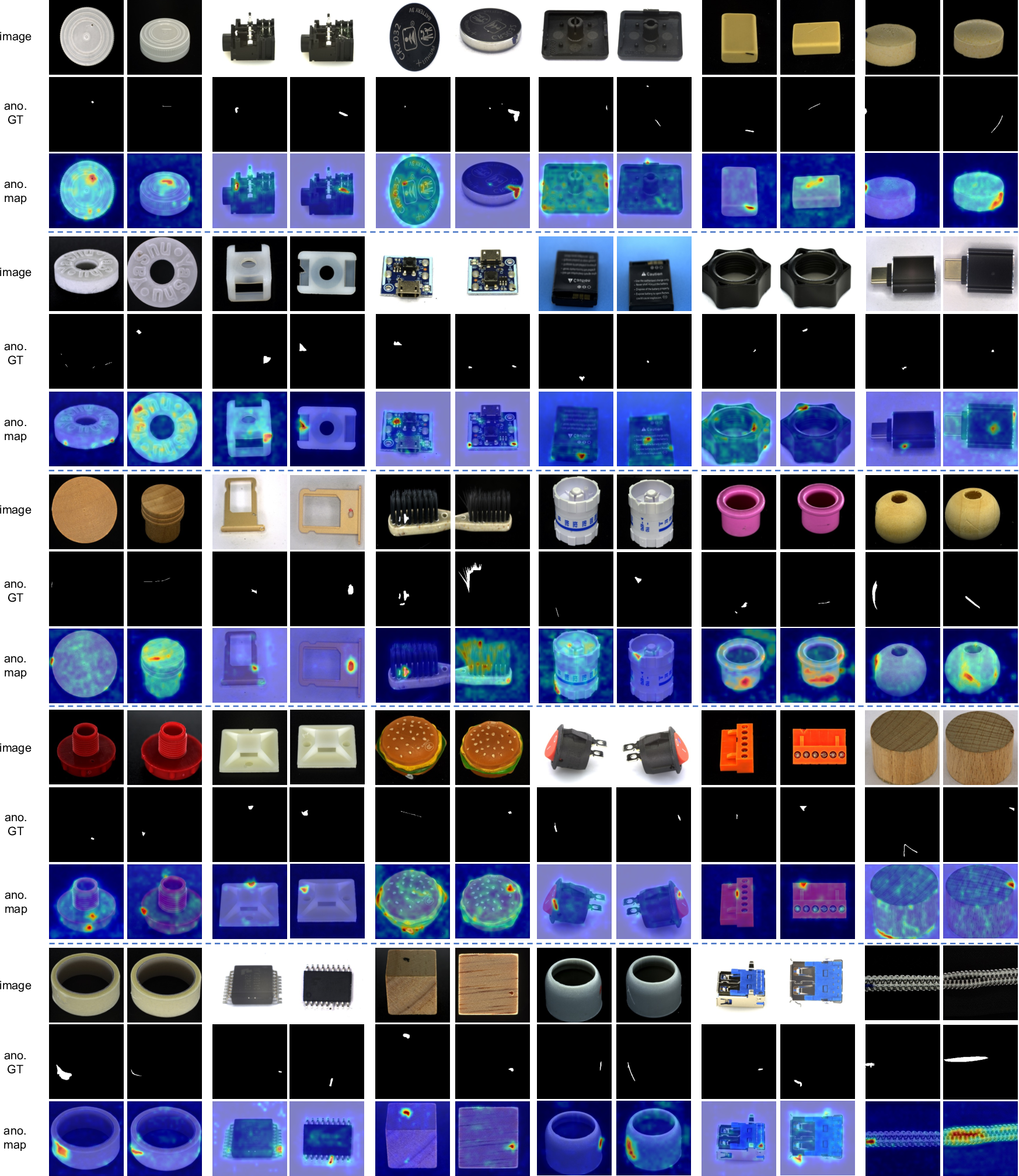
Figure 4: Representative anomaly maps on Real-IAD, demonstrating robust discrimination of subtle and small-sized surface distresses.
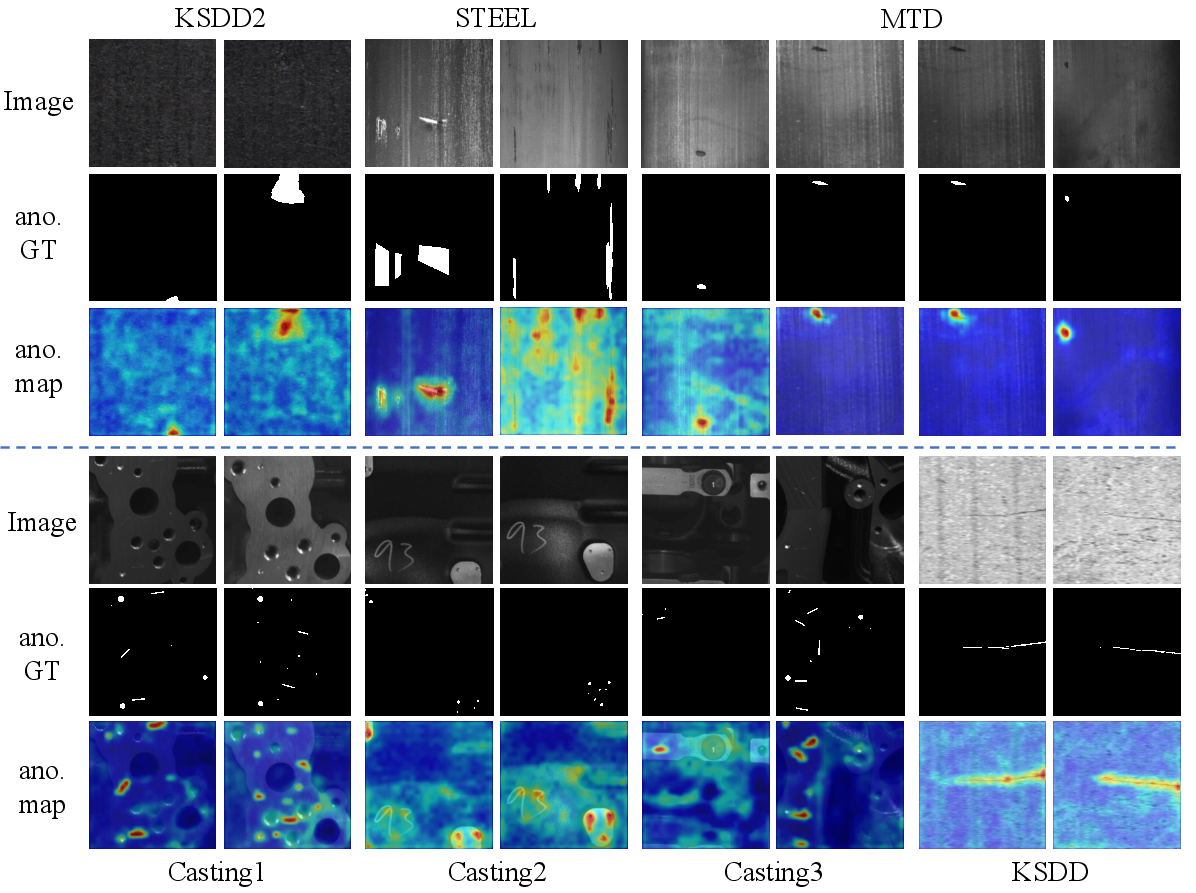
Figure 5: Qualitative maps for HSS-IAD, showing consistent localization even with confounding process marks and intra-class variability.
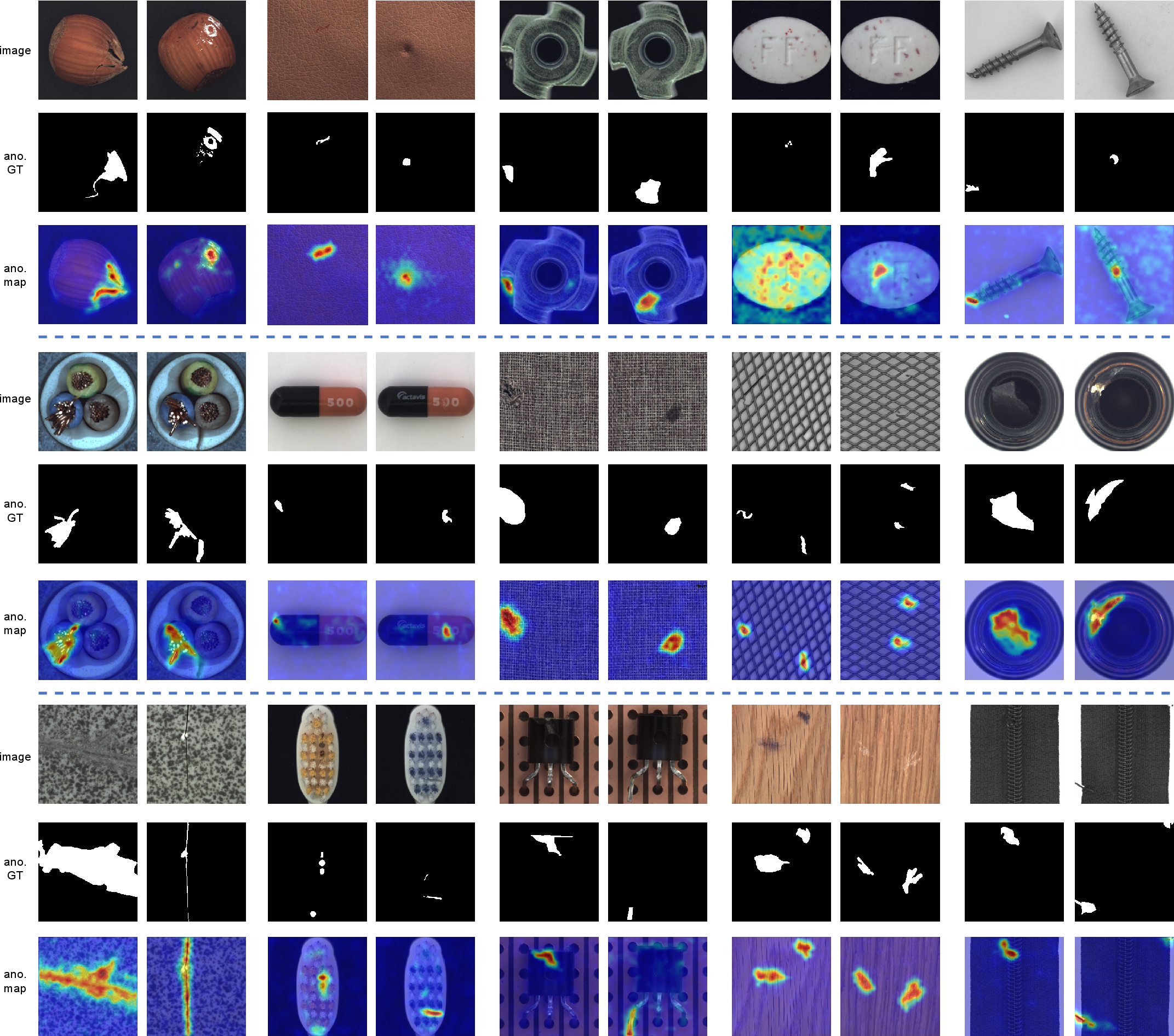
Figure 6: CRR anomaly visualization on MVTec-AD—high sensitivity to tiny anomalies and structural irregularities.
Detailed Ablation Analysis
CRR's performance is enabled by three interacting mechanisms: collaborative repair, random feature masking, and segmentation-driven fusion. Ablation studies demonstrate that each module contributes both individually and synergistically, with the segmentation component particularly refining pixel-level metrics.
Experiments on the masking rates reveal that the approach is robust to a range of ratios, with moderate masking generally increasing pixel-level AP and F1-max, as the decoder is forced to infer local context instead of identity mapping.
Different segmentation heads were also compared; the proposed lightweight convolutional-upsampled segmentation module outperformed ResNet-based alternatives, especially in pixel-precise AP and F1-max, highlighting the necessity of domain-custom upsampling in industrial AD.
Practical and Theoretical Implications
Practically, CRR scales to industrial environments with many (30+) object categories, showing strong generalization, fine-grained detection, and significantly reduced model overhead compared to class-specific models. Theoretically, the collaborative reconstruction and repair paradigm provides a unified solution to the encoder-decoder identity mapping deadlock in OOD detection, and the feature-masked repair training may have wider applications in other domain-adaptive or few-shot OOD tasks.
Nevertheless, current limitations are evident in the detection of "logical anomalies"—those involving global consistency or relational constraints rather than strictly pixel-level appearance changes. Pixel-level segmentation approaches, including CRR, may of necessity underperform in these cases, as the ground-truth anomaly is not visually localized.
Conclusion
The Collaborative Reconstruction and Repair (CRR) methodology represents a significant methodological advance for unified MIAD, systematically mitigating the identity mapping dilemma and delivering cross-dataset SoTA for both detection and segmentation. By bridging the encoder-decoder gap with targeted synthetic anomaly repair, CRR offers a scalable, generalizable framework well-suited for real-world multi-product industrial settings. Future work should extend this approach with global constraint modeling to address logical and relational anomalies, thus approaching true open-world unsupervised industrial AD.