- The paper formalizes the reality gap using a POMDP framework, distinguishing discrepancies in dynamics, perception, and actuation between simulation and reality.
- It proposes a taxonomy of sim-to-real transfer methods, focusing on gap reduction through improved simulation fidelity and robust policy adaptations.
- The analysis presents evaluation metrics and outlines open research directions to enhance scalable robot learning and real-world deployment.
The Reality Gap in Robotics: A Comprehensive Analysis
Introduction
The reality gap—the divergence between simulated and real-world environments—remains a central challenge in robotics, particularly as simulation becomes increasingly critical for scalable robot learning, benchmarking, and data generation. This survey provides a rigorous dissection of the reality gap, formalizes its sources, and systematically reviews both reduction and mitigation strategies, with a focus on their practical implications for sim-to-real transfer. The work also introduces a taxonomy of methods, evaluation metrics, and discusses open problems and future research directions.
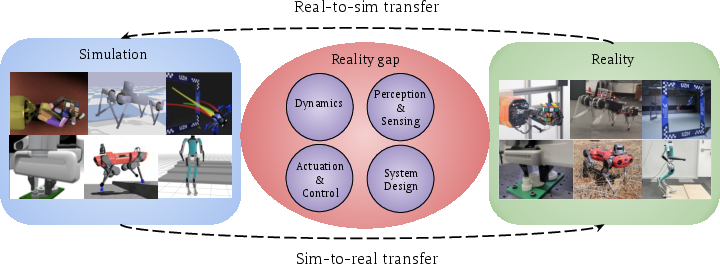
Figure 1: The reality gap is the difference between a simulated and real environment in aspects related to dynamics, perception, sensing, actuation, control, and system design. By carefully designing these modules, the gap can be reduced to a reasonable size. Sim-to-real as well as real-to-sim transfer require methods that can carefully overcome the remaining reality gap.
The paper formalizes the sim-to-real problem using the POMDP framework, distinguishing between the reality gap (differences in dynamics and perception models between simulation and reality) and the performance gap (the difference in policy performance across domains). The reality gap is decomposed into:
Sources of the Reality Gap
The survey provides an exhaustive breakdown of the atomic sources of the reality gap:
- Dynamics: Rigid-body simplifications, chaotic phenomena, stochastic disturbances, battery and powertrain effects, contact modeling, parameter misestimation, numerical integration, human-robot interaction, unmodeled effects, and asset fidelity.
- Perception and Sensing: Sensor model fidelity (e.g., RGB, depth, LiDAR), sensor noise (often non-Gaussian and state-dependent), environment and robot model representation, and collision sensing.
- Actuation and Control: Nonlinearities in actuators, low-level control stack mismatches, power electronics, and their impact on control authority and latency.
- System Design: Communication reliability, safety mechanisms, reward and termination criteria, and discretization mismatches.
The analysis emphasizes that these gaps are not independent; their interactions can amplify sim-to-real transfer failures.
Taxonomy of Sim-to-Real Transfer Methods
A central contribution is the taxonomy of sim-to-real transfer methods, distinguishing between gap reduction (improving simulation fidelity, choosing robust modalities/representations, and system design choices) and gap overcoming (domain randomization, adaptation, and robust policy learning).
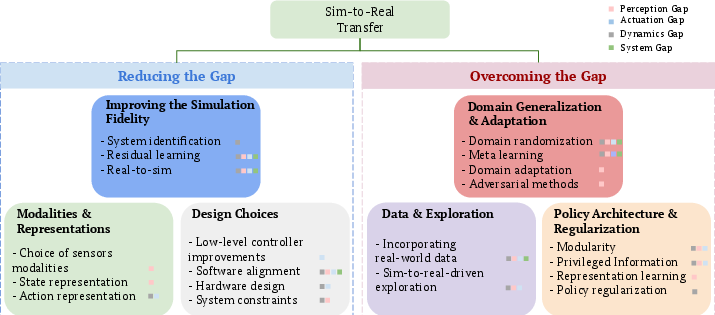
Figure 3: A taxonomy of sim-to-real transfer methods, distinguishing clearly between approaches and techniques that are designed to reduce the reality gap and those designed to overcome it. The colored squares indicate which reality gap each method addresses.
Gap Reduction
- Improving Simulation: System identification (including online/iterative methods), learned residual models (augmenting simulators with neural corrections), and real-to-sim environment creation (leveraging real data for geometry, kinematics, and rendering).
- Choice of Modalities/Representations: Using depth or point clouds instead of RGB, keypoint or feature-based state representations, and action spaces (e.g., velocity vs. torque control) that minimize transfer sensitivity.
- System Design: High-frequency low-level controllers, software stack alignment, hardware choices for robustness, and constraining system dynamics to quasi-static regimes.
Gap Overcoming
- Domain Randomization: Training over a wide distribution of simulation parameters to induce robustness.
- Adversarial Training: Introducing adversarial disturbances during training.
- Meta-Learning and Domain Adaptation: Enabling policies to adapt online to new dynamics or observation shifts.
- Data Selection and Exploration: Incorporating real-world data for co-training, active exploration for system identification, and sim-to-real-driven exploration.
- Policy Architecture and Regularization: Modular architectures, use of privileged information, representation learning for domain invariance, and explicit policy regularization (e.g., smoothness, action penalties).
Evaluation Metrics
The paper delineates metrics for both the reality gap and sim-to-real transfer:
- Reality Gap Metrics: Sim-to-real correlation coefficient (SRCC), offline replay error (open-loop trajectory divergence), and visual fidelity metrics (IS, FID, KID, SSIM, PSNR, IPD).
- Sim-to-Real Transfer Metrics: Success rate, cumulative reward, and task-specific indicators (e.g., path efficiency, object distance to goal).
The analysis highlights that high simulation performance with low SRCC is problematic, as it undermines the utility of simulation for policy selection and benchmarking.
Open Problems and Future Directions
The survey identifies several open research directions:
- Model-based Control with Imperfect Simulators: Emphasizes that minimizing the performance gap is more critical than achieving high-fidelity simulation. There is evidence that optimizing models for high-return regions is more effective than uniform accuracy.
- Differentiable Simulators: The integration of differentiable simulation with learning-based models is promising, but challenges remain in scalability, stability, and hybrid modeling.
- Video and World Models: World models learned from real data may offer a path to smaller reality gaps, but suffer from compounding errors, poor generalization, and high data requirements.
- Simulation-Based Inference: Bayesian and neural posterior estimation methods for system identification are highlighted as promising, but the ill-posedness and multimodality of the inverse problem remain significant challenges.
- Simulation for Large-Scale Robotics Models: The use of simulation for data generation and policy evaluation in large-scale robotics models is promising, but the scalability of gap reduction methods and the calibration of simulation for evaluation remain open questions.
Conclusion
This survey provides a comprehensive and systematic treatment of the reality gap in robotics, offering a detailed taxonomy of sources, solutions, and evaluation strategies. The work underscores that while perfect simulation fidelity is unattainable, robust sim-to-real transfer is achievable through a combination of simulation improvements, robust policy learning, and careful system design. Theoretical and practical implications extend to the design of future robot learning pipelines, the development of large-scale robotics models, and the integration of simulation-based inference and differentiable simulation. The open problems identified will shape the trajectory of sim-to-real research and its impact on the deployment of autonomous systems.