- The paper introduces a structured representation that uses 2D planar priors to constrain Gaussian distributions, enabling concise mesh reconstruction with improved normal consistency.
- It employs a dynamic Gaussian re-classifier and mesh layout refinement to enforce explicit planar constraints and correct misclassifications for optimal surface quality.
- Experimental results on indoor and outdoor datasets show significant reductions in vertex count and enhancements in geometric accuracy and topological coherence, beneficial for simulation and scene editing.
Concise and Accurate Planar Reconstruction via Structured Representation: GSPlane
Introduction and Motivation
GSPlane introduces a structured approach for reconstructing planar regions in 3D scenes, leveraging 2D planar priors extracted from posed images. The method addresses the limitations of existing Gaussian Splatting (GS) techniques, which often fail to enforce geometric consistency and topological correctness in planar regions, resulting in unnecessarily dense meshes and suboptimal surface quality. By integrating segmentation and surface normal estimation, GSPlane establishes explicit planar constraints on Gaussian distributions, enabling concise mesh generation with fewer vertices and improved normal consistency. The approach is particularly relevant for man-made environments, where planar structures are prevalent and critical for downstream tasks such as physical simulation and scene editing.
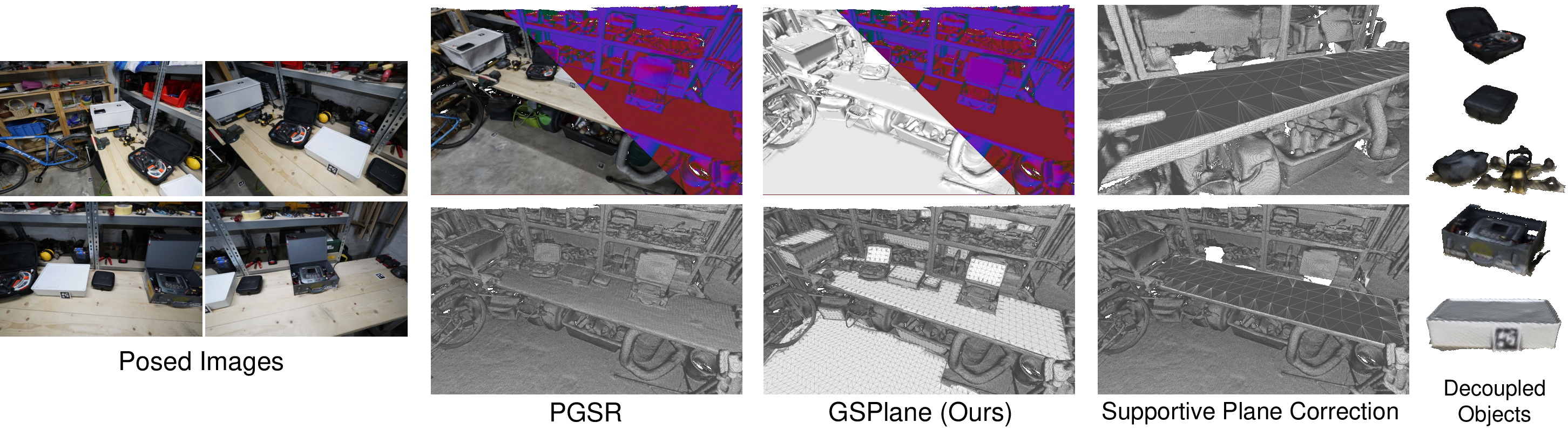
Figure 1: GSPlane leverages 2D planar priors to constrain planar Gaussian distributions, enabling topologically correct mesh refinement with reduced vertex count and object decoupling on supportive planes.
Methodology
Structured Planar Representation
GSPlane begins by extracting surface normal maps and segmentation masks from each input image using off-the-shelf models (Metric3Dv2 and SAM). Planar regions are identified via cosine similarity between pixel normals and region-averaged normals, followed by merging overlapping planar masks based on normal consistency. These 2D planar priors are projected into 3D space, where a graph-based clustering (Leiden algorithm) aggregates points into planar groups.
For each planar group, Gaussian centers are re-parameterized as normalized weighted combinations of three non-collinear basis points on the plane:
VP′=ω1F1+ω2F2+ω3F3,ω1+ω2+ω3=1
This formulation enforces that all planar Gaussians remain coplanar during optimization, with both basis points and weights updated throughout training.
Dynamic Gaussian Re-classifier (DGR)
To mitigate misclassification of non-planar Gaussians as planar, GSPlane introduces the Dynamic Gaussian Re-classifier. DGR monitors gradient magnitudes during training, reclassifying planar Gaussians with persistently high gradients (indicative of poor fit) back to standard xyz coordinates. This adaptive mechanism ensures robust optimization and prevents erroneous planar constraints from degrading mesh quality.
Mesh Layout Refinement
Post-training, mesh layout refinement leverages the optimized planar priors to restructure mesh topology. Mesh vertices are assigned to planar regions via spatial proximity, and faces formed by coplanar vertices are removed. Interior vertices are replaced with uniformly distributed grid points within the minimum enclosing rectangle of the planar region, followed by Delaunay triangulation to reconstruct the surface. This process yields meshes with reduced vertex density, improved normal consistency, and coherent topology.
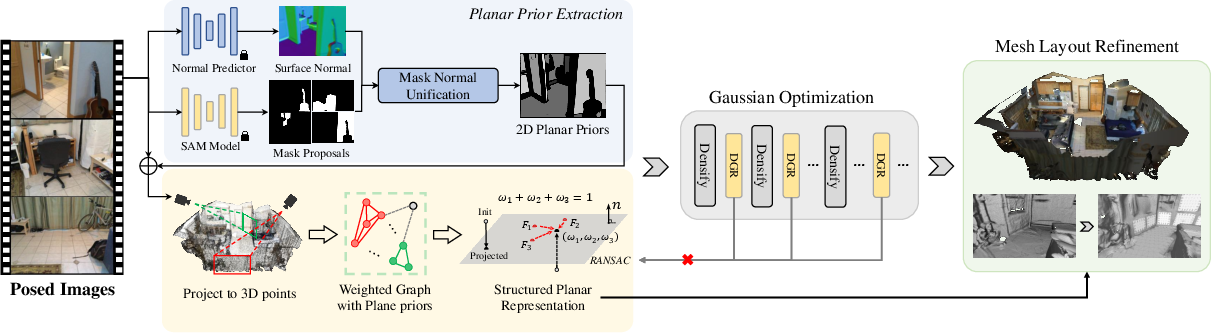
Figure 2: GSPlane pipeline: extraction of 2D planar priors, alignment with point cloud, re-parameterization of Gaussians, DGR correction, and mesh refinement using structured planar information.
Supportive Plane Correction (SPC)
SPC extends mesh refinement to supportive planes (e.g., tables, floors), enabling decoupling of objects and sealing of contact regions. During SPC, grid points outside the projected planar region are retained, and boundary vertices defining voids are excluded from triangulation. This ensures the reconstructed plane remains intact and continuous, facilitating realistic object manipulation and scene editing.
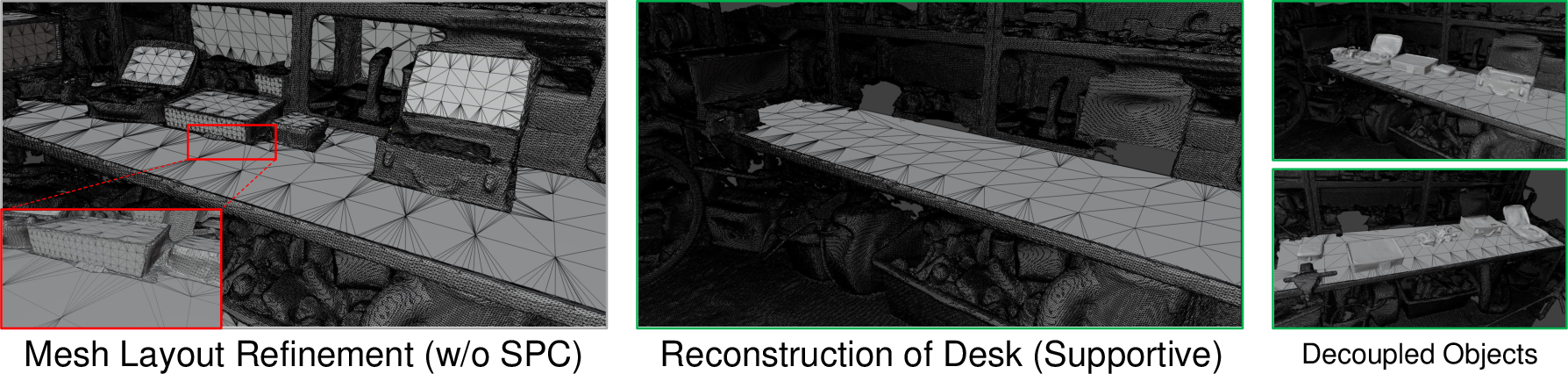
Figure 3: SPC enables exclusion of object boundaries from plane reconstruction, resulting in intact, manipulable supportive planes.
Experimental Results
Quantitative Evaluation
GSPlane was evaluated on ScanNetV2 (indoor) and Tanks and Temples (outdoor) datasets. Metrics included geometric accuracy (Accuracy, Completion, Precision, Recall, F-score), planar-wise metrics (Fidelity, L1-Chamfer), and rendering quality (PSNR, SSIM, LPIPS). Across five GS-based baselines (3DGS, 2DGS, GOF, RaDe-GS, PGSR), GSPlane consistently improved geometric and planar-wise metrics while significantly reducing mesh vertex count. For example, on ScanNetV2, 2DGS + GSPlane achieved an F-score of 0.689 and reduced mesh vertices from 1.73M to 946.1K. Planar-wise metrics demonstrated superior fidelity and chamfer distance compared to prior methods.
Qualitative Analysis
Visualizations confirm that GSPlane produces meshes with consistent normals and coherent topology across planar regions, maintaining rendering quality and enabling efficient scene manipulation.
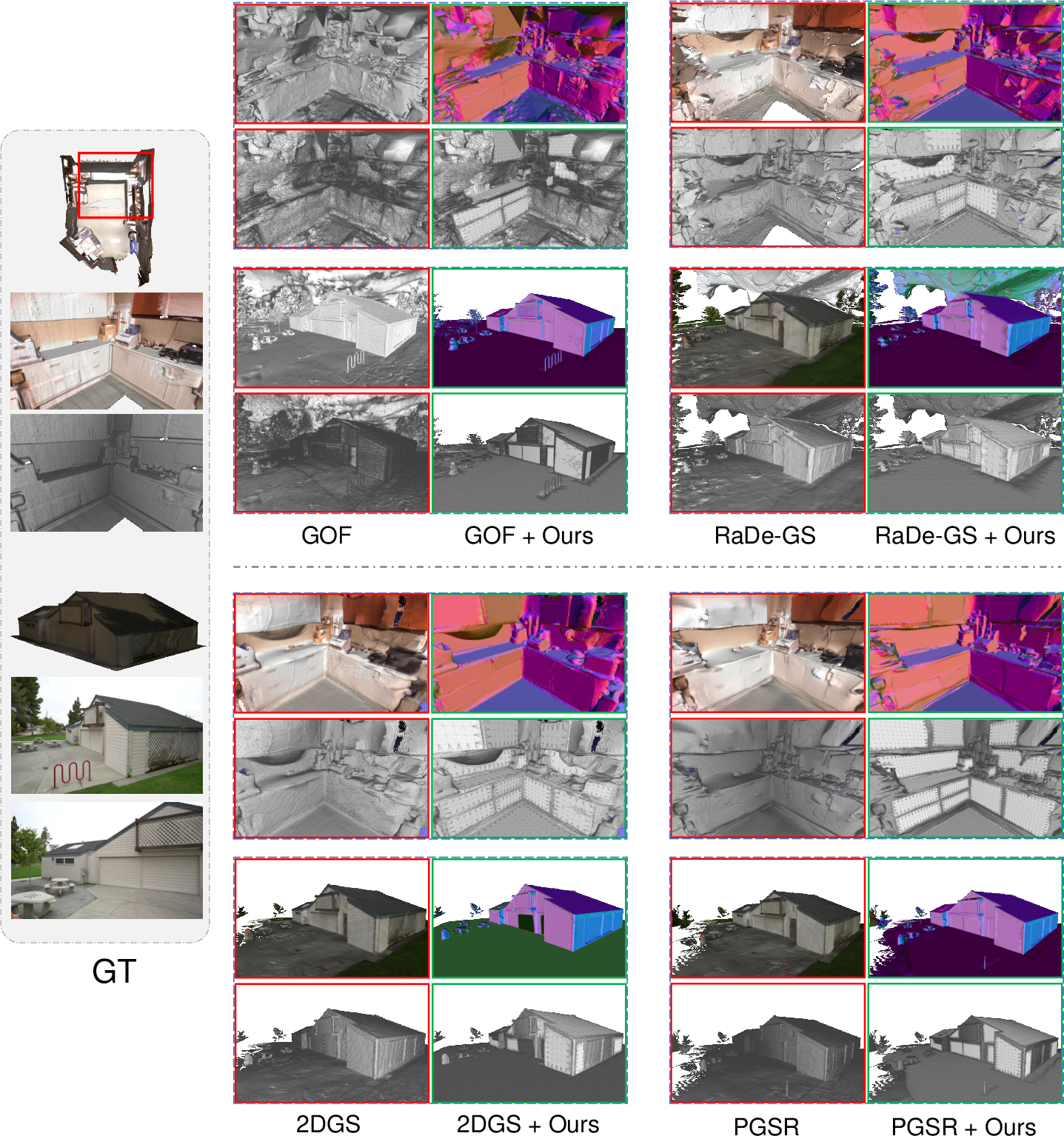
Figure 4: Mesh visualizations on indoor and outdoor scenes show reduced vertex count and consistent topology with GSPlane compared to baselines.
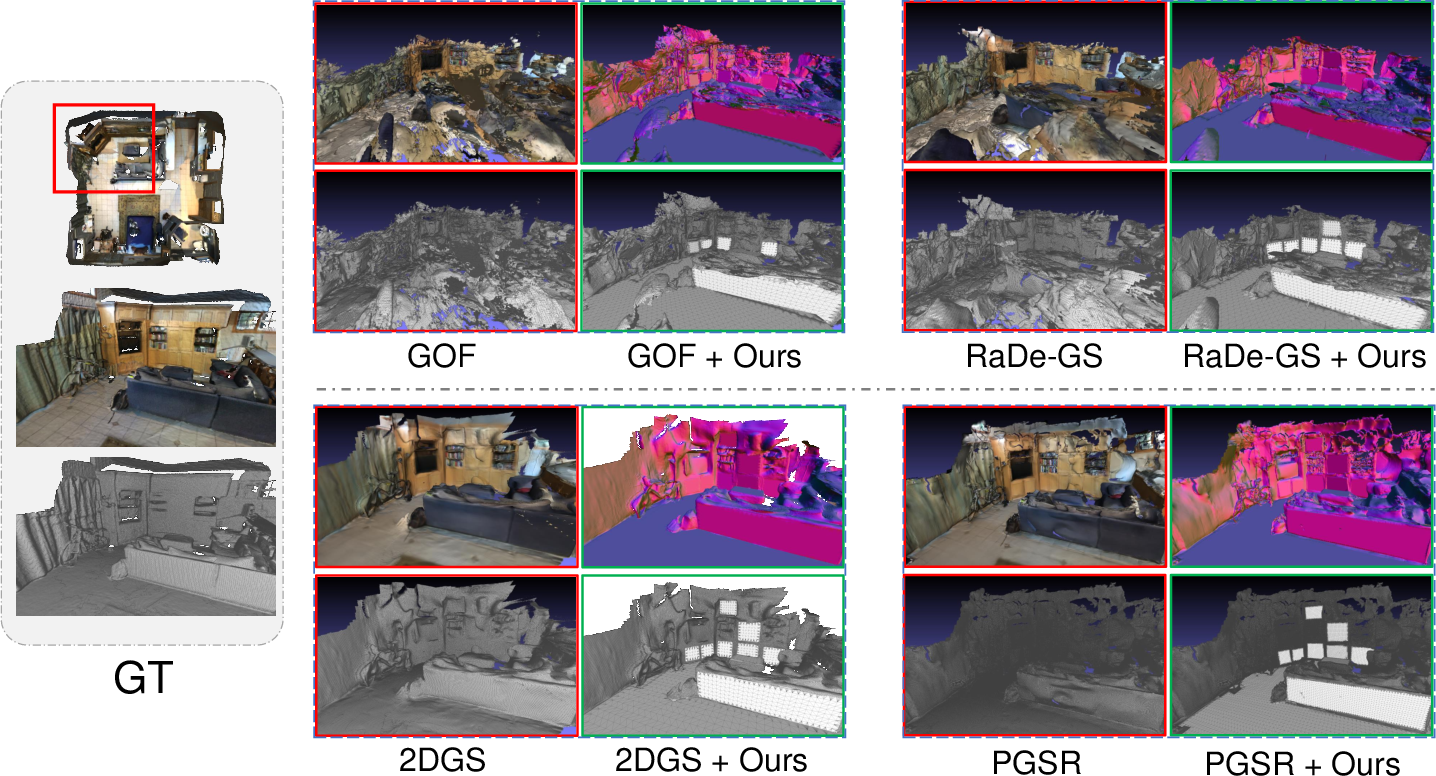
Figure 5: Reconstructed mesh performance highlights the geometric accuracy and topological improvements of GSPlane.
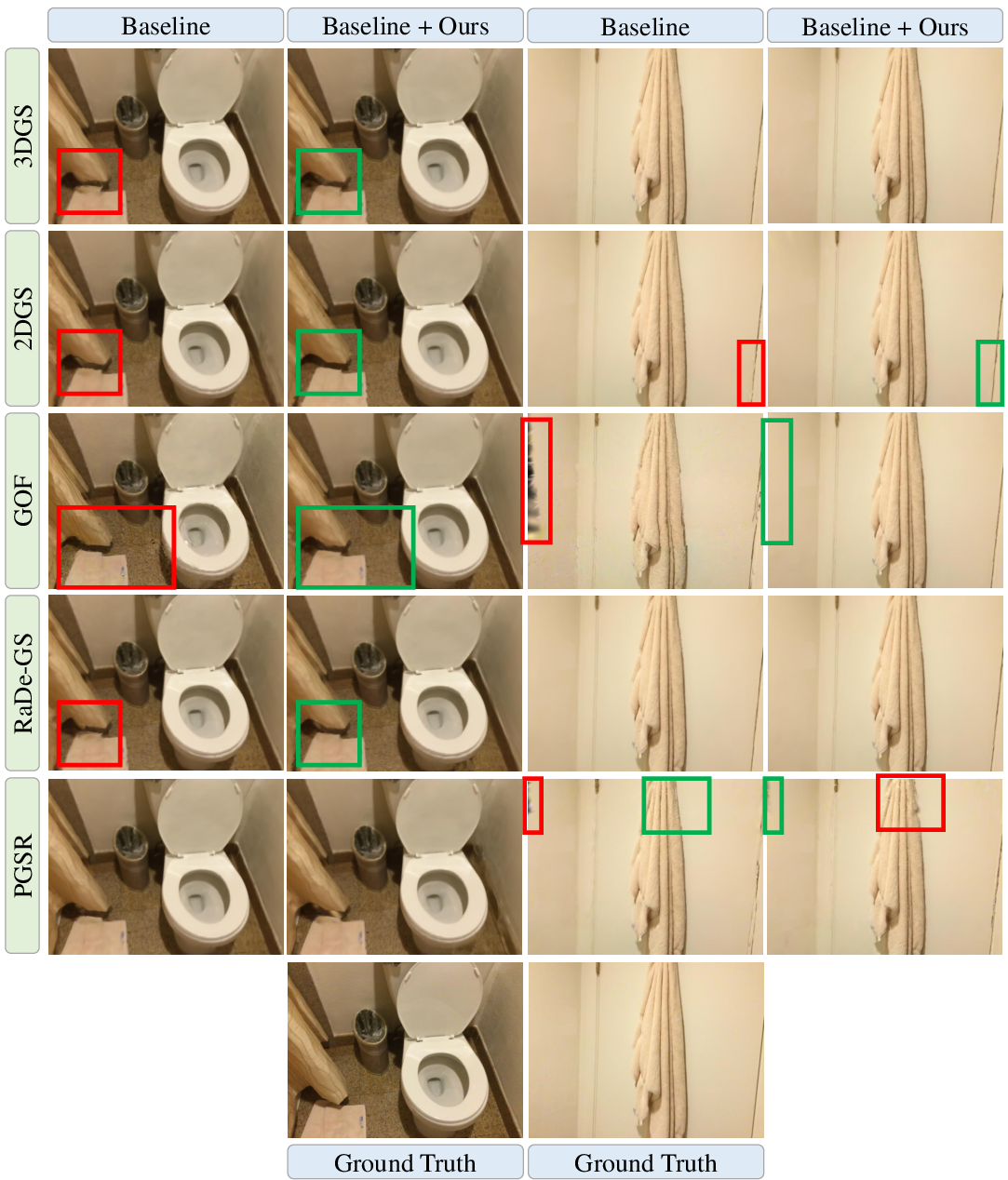
Figure 6: Novel View Synthesis results demonstrate that GSPlane maintains high rendering fidelity.
Ablation Studies
Ablation experiments validate the contributions of basis point optimization, DGR, and mesh layout refinement. Structured planar representation outperforms direct normal map supervision in geometric reconstruction. Hyperparameter studies on cosine similarity threshold (α) and minimum pixel count (σ) confirm robustness of the approach.

Figure 7: Ablation results show the impact of each GSPlane module and superiority of structured representation over normal map supervision.
Limitations
GSPlane focuses on planar regions; structured representation for non-planar surfaces remains an open challenge. The accuracy of planar priors is contingent on the performance of segmentation and normal estimation models. Future work may explore alternative representations for complex surfaces and improved prior extraction.
Implications and Future Directions
GSPlane demonstrates that explicit incorporation of planar priors into GS-based reconstruction pipelines yields concise, topologically correct meshes suitable for downstream applications such as simulation, editing, and embodied interaction. The structured representation facilitates object decoupling and manipulation, advancing the utility of 3D scene reconstruction in practical settings. The approach suggests further research into structured representations for non-planar regions, integration with foundation models for improved prior extraction, and real-time scene editing capabilities.
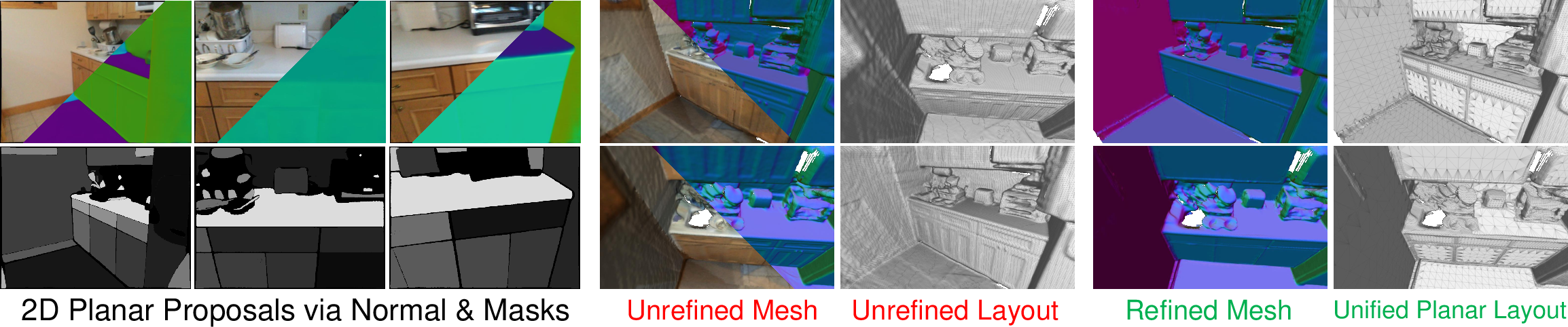
Figure 8: Visualization of planar prior extraction and mesh refinement, showing improved normal consistency and reduced vertex density after GSPlane processing.
Conclusion
GSPlane establishes a robust framework for concise and accurate planar reconstruction via structured representation, integrating 2D planar priors, adaptive Gaussian reclassification, and mesh refinement. The method achieves state-of-the-art geometric and topological performance in planar regions, reduces mesh complexity, and enables realistic scene manipulation. These advances have significant implications for 3D reconstruction, digital twin creation, and interactive scene editing, motivating future research into structured representations for complex geometries and enhanced prior extraction methodologies.