- The paper introduces targeted fine-tuning methods, including Downstream and Partial Layer Fine-tuning, to adapt models to varied LiDAR sensor setups.
- The proposed techniques yield significant performance improvements, with ablation studies confirming balanced gains in model efficiency and detection accuracy.
- A comprehensive multi-configuration dataset is constructed to simulate real-world autonomous driving scenarios, validating the robustness of the adaptation methods.
Domain Adaptation for Different Sensor Configurations in 3D Object Detection
This paper focuses on a critical yet underexplored aspect in autonomous driving: domain adaptation across differing LiDAR sensor configurations in 3D object detection. The authors propose methods to enhance the generalization of 3D object detection models across varying sensor setups, which is particularly relevant for diverse autonomous vehicle platforms such as buses and taxis. The research introduces new techniques for fine-tuning and evaluates their efficacy through a thorough experimental setup on specially constructed datasets.
Introduction
The paper begins by detailing the importance of 3D object detection in autonomous driving scenarios, emphasizing the prominence of LiDAR sensors due to their robustness and precision. Different autonomous platform types utilize distinct LiDAR configurations, leading to variations in point cloud characteristics and subsequent performance degradation when models trained under one configuration are applied to another. The paper posits that addressing this domain gap is imperative to improve the generalization capability of autonomous systems across diverse vehicle types.
Proposed Methods
Downstream Fine-tuning and Partial Layer Fine-tuning
The authors propose two primary methodologies: Downstream Fine-tuning and Partial Layer Fine-tuning. Downstream Fine-tuning involves a two-stage training strategy that initially trains a model on multiple datasets to learn general features and then fine-tunes it on specific datasets to adapt to unique sensor configurations.
Partial Layer Fine-tuning selectively updates a subset of model layers that are more sensitive to changes in sensor configurations. This method seeks to balance computational efficiency with performance by targeting changes in the backbone and neck layers, which are more responsive to spatial feature variations while keeping the encoder and head layers unchanged due to their stability in consistent environments.
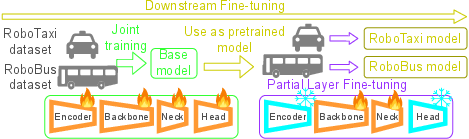
Figure 1: Overview of the proposed training strategy combining Downstream Fine-tuning and Partial Layer Fine-tuning, as our concept of domain adaptation for different sensor configurations.
Multi-Configuration Dataset
A significant contribution of the paper is the construction of a multi-configuration dataset that reflects real-world autonomous vehicle scenarios with differing sensor setups. These include a RoboTaxi configuration with a top-mounted LiDAR and several sub-LiDARs, and a RoboBus configuration with LiDARs positioned to mitigate blind spots for larger vehicles. This dataset serves as a testbed to explore sensor configuration domain gaps.
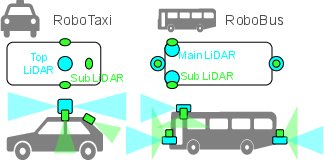
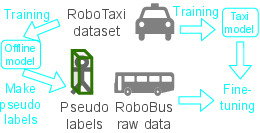
Figure 2: (a) Multi-configuration dataset with a consistent annotation format across different sensor setups. (b) Overview of the unsupervised domain adaptation pipeline.
Experiments and Results
The authors report comprehensive experiments demonstrating the efficacy of their adaptation methods. The joint training followed by fine-tuning consistently outperformed naive joint training across different sensor setups, with substantial mAP improvements noted in the Bus and Bicycle categories. This advancement underscores the adaptability and specialization potential of the proposed techniques.
The paper further details the performance impact of the proposed methods across scenarios using the multi-configuration dataset, affirming the strategies against a backdrop of robust experimental evaluations.
Ablation Studies
Through systematic ablation studies, the paper dissects the contributions of each component in their methods. Specifically, the study confirms that partial layer fine-tuning of backbone and neck layers yields balanced improvement in adaptation efficiency and accuracy than a full model fine-tuning approach.
Analysis
An in-depth parameter analysis complements the empirical results, where the magnitude of changes in different model layers is calculated to deduce which modules are most influenced by domain shifts. The paper provides a procedural algorithm for computing these differences, shining light on which aspects of the model architecture require adaptation during domain shifts.
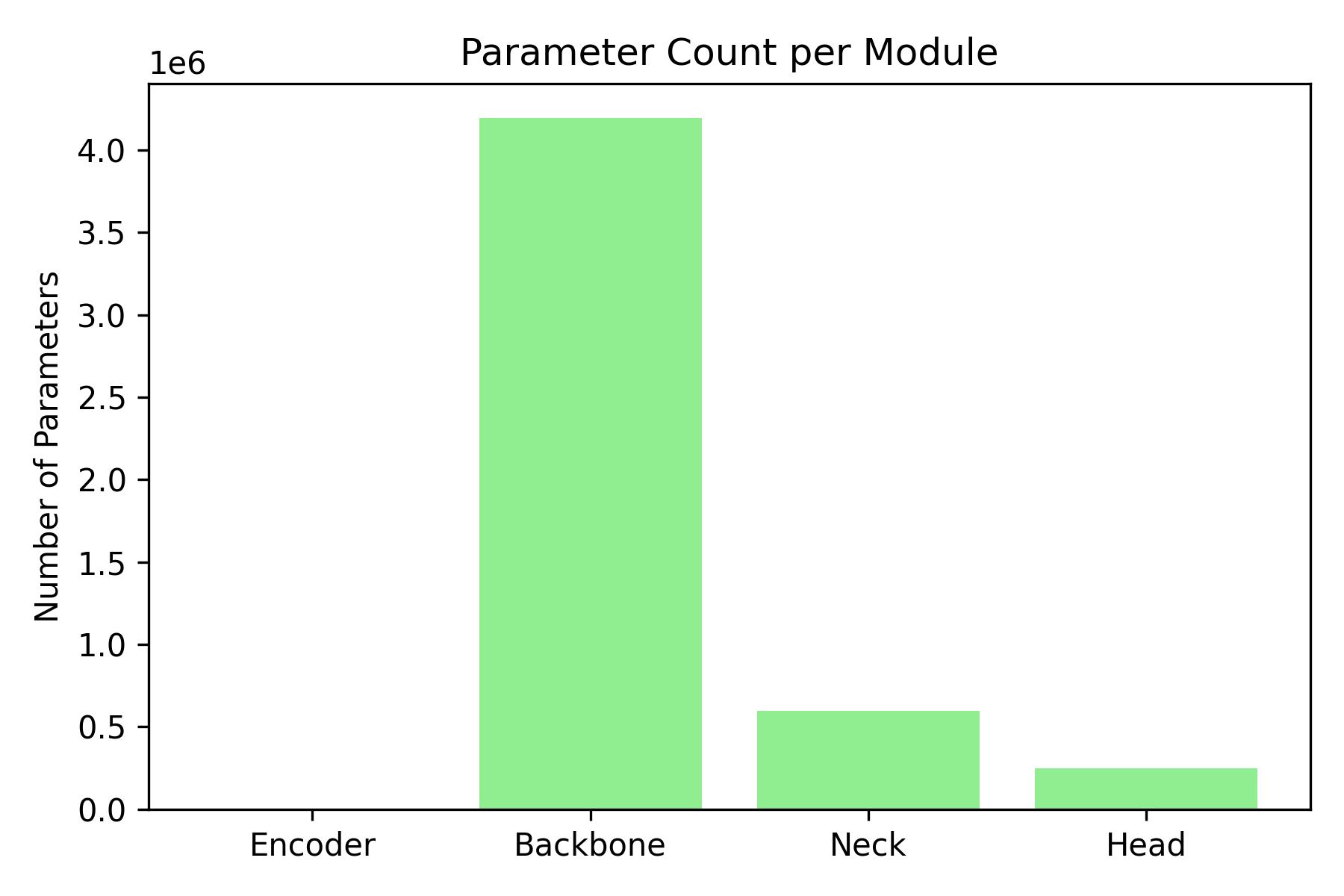
Figure 3: The total number of parameters for each layer.
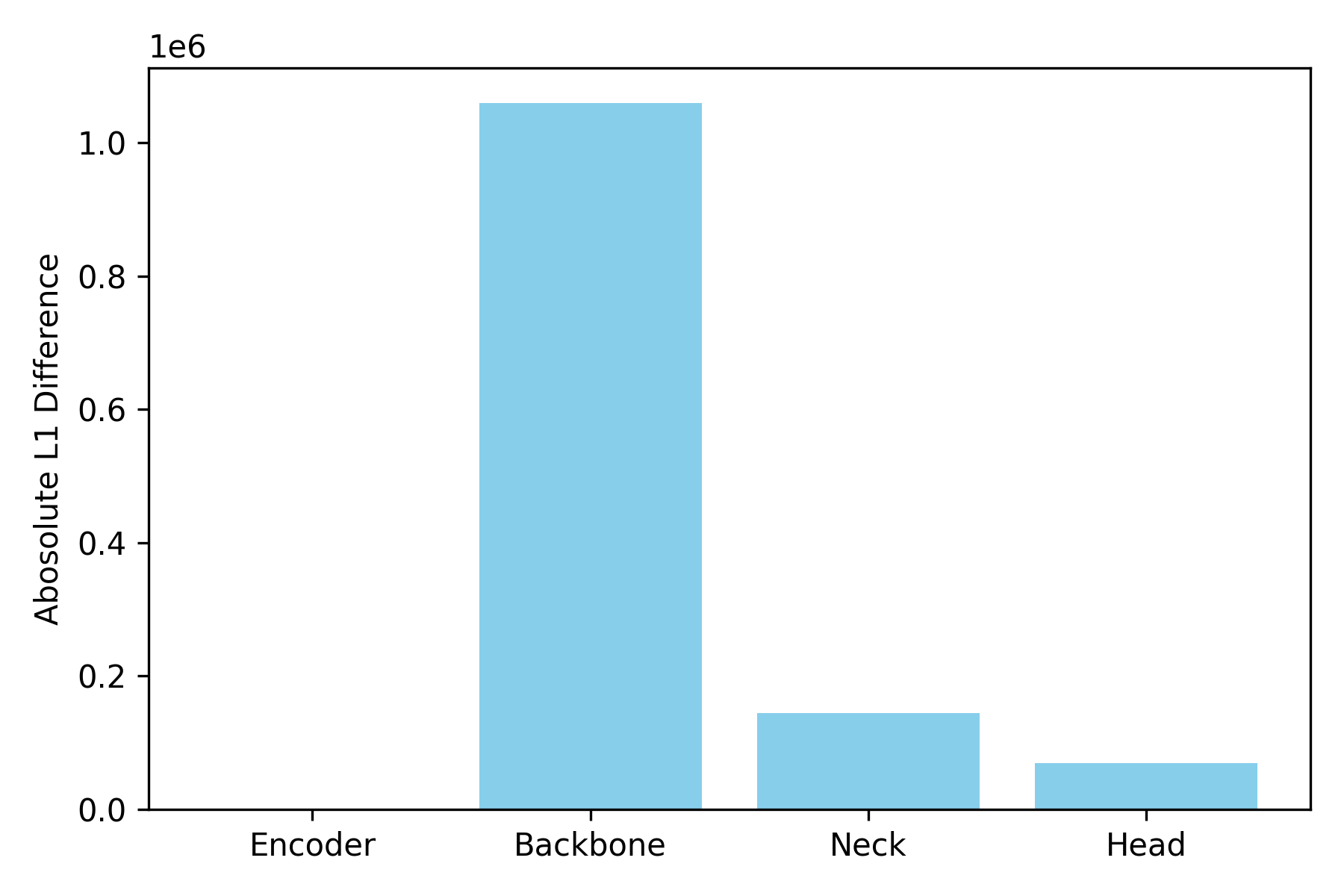
Figure 4: The absolute parameter differences between the RoboTaxi model and the RoboBus model.
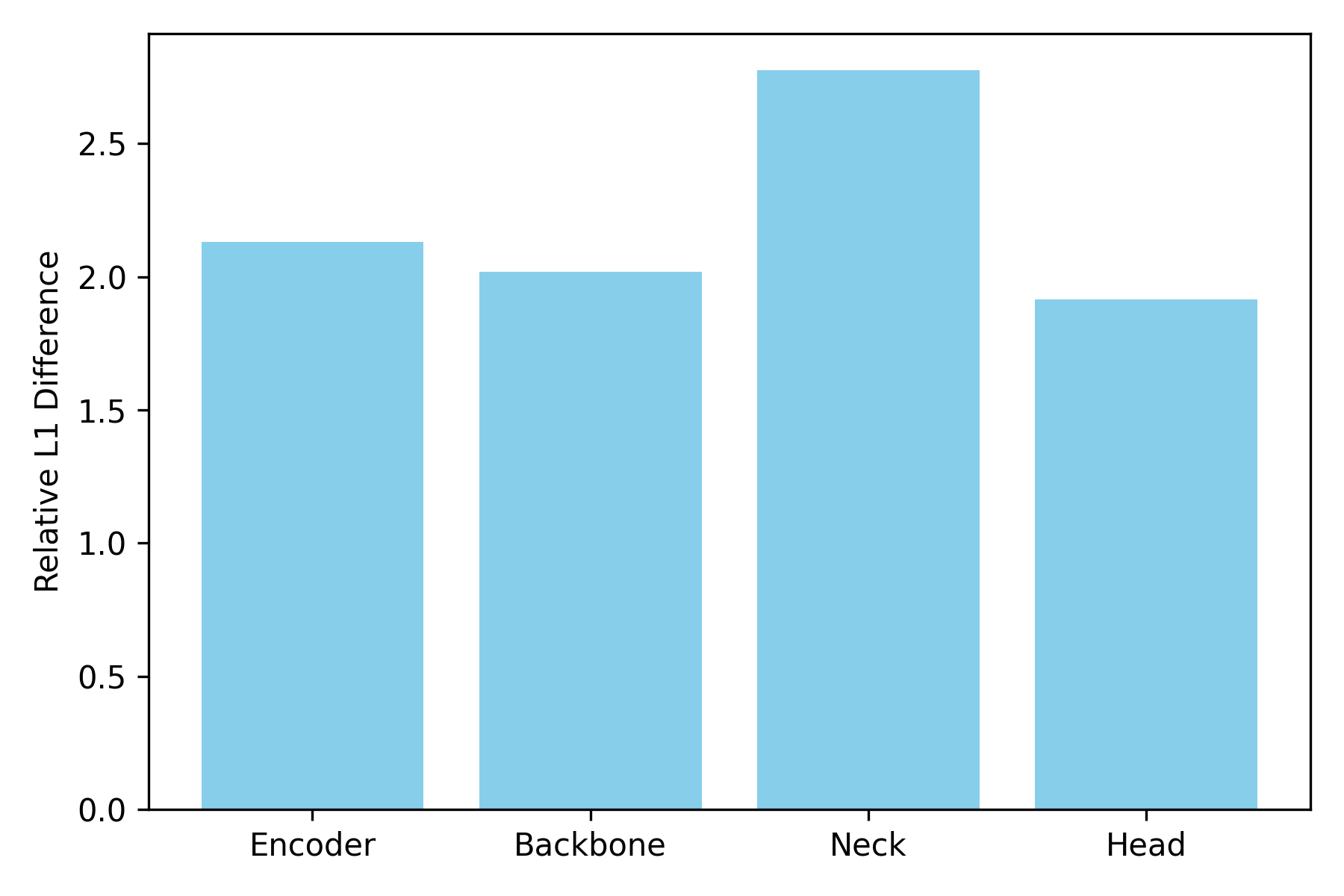
Figure 5: The relative parameter differences between the RoboTaxi model and the RoboBus model.
Conclusion
The research concludes by highlighting the value of the proposed fine-tuning strategies for enhancing 3D object detection in the face of diverse sensor configurations. It posits that these methodologies offer a scalable, practical approach to extend the capabilities of existing autonomous systems, ultimately contributing to more adaptive and versatile autonomous driving solutions.
The implications of this research extend beyond theoretical interest, providing concrete steps towards accommodating the rich diversity of sensor configurations encountered in real-world autonomous driving.