Inversion of biological strategies in engineering technology: in case underwater soft robot
Abstract: This paper proposes a biomimetic design framework based on biological strategy inversion, aiming to systematically map solutions evolved in nature to the engineering field. By constructing a "Function-Behavior-Feature-Environment" (F-B-Cs in E) knowledge model, combined with NLP and multi-criteria decision-making methods, it achieves efficient conversion from biological strategies to engineering solutions. Using underwater soft robot design as a case study, the effectiveness of the framework in optimizing drive mechanisms, power distribution, and motion pattern design is verified. This research provides scalable methodological support for interdisciplinary biomimetic innovation.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper shows a clear, step-by-step way to copy smart ideas from nature and use them in engineering. The authors build a “translation guide” between biology and engineering and use AI to read biology texts, pick out useful tricks (like how a squid jets forward), and turn them into designs for machines. They test their method by making and testing soft underwater robots that move like fish tails, squids, and inchworms.
What questions did the researchers ask?
The authors wanted to solve four simple questions:
- How can we describe a living thing’s strategy (what it does, how it works, and why) in a way engineers can use?
- Can AI help read lots of biology papers and pull out the key ideas automatically?
- When there are several nature-inspired ideas, how do we pick the best one for the job?
- Does this process actually work on a real problem, like building better soft underwater robots?
How did they do it?
To make this understandable, think of their method as a recipe with three main steps: build a shared language, teach AI to read, and choose the best plan.
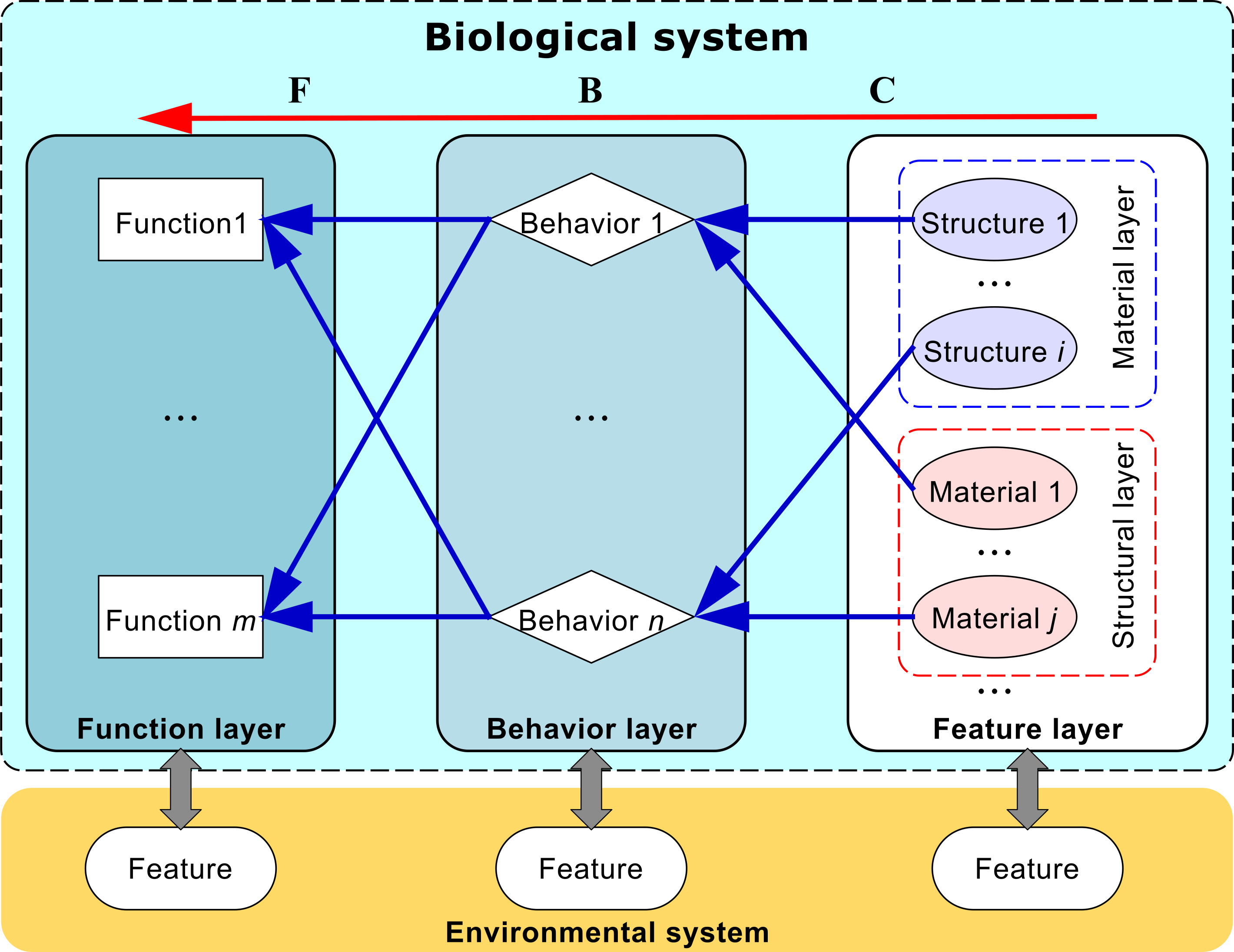
1) The F-B-C-E map: a shared language
They created a simple model called F-B-C-E to describe a biological strategy:
- Function (F): What the system is trying to do (the goal), like “move forward” or “reduce drag.”
- Behavior (B): How it does it (the process), like “flapping” or “pumping.”
- Characteristic (C): What it’s made of or its special features, like “flexible fins” or “elastic chamber.”
- Environment (E): Where it works, like “underwater with currents.”
You can think of F-B-C-E as a fill-in-the-blank template: what-it-does, how-it-does-it, what-it’s-made-of, and where-it-lives.
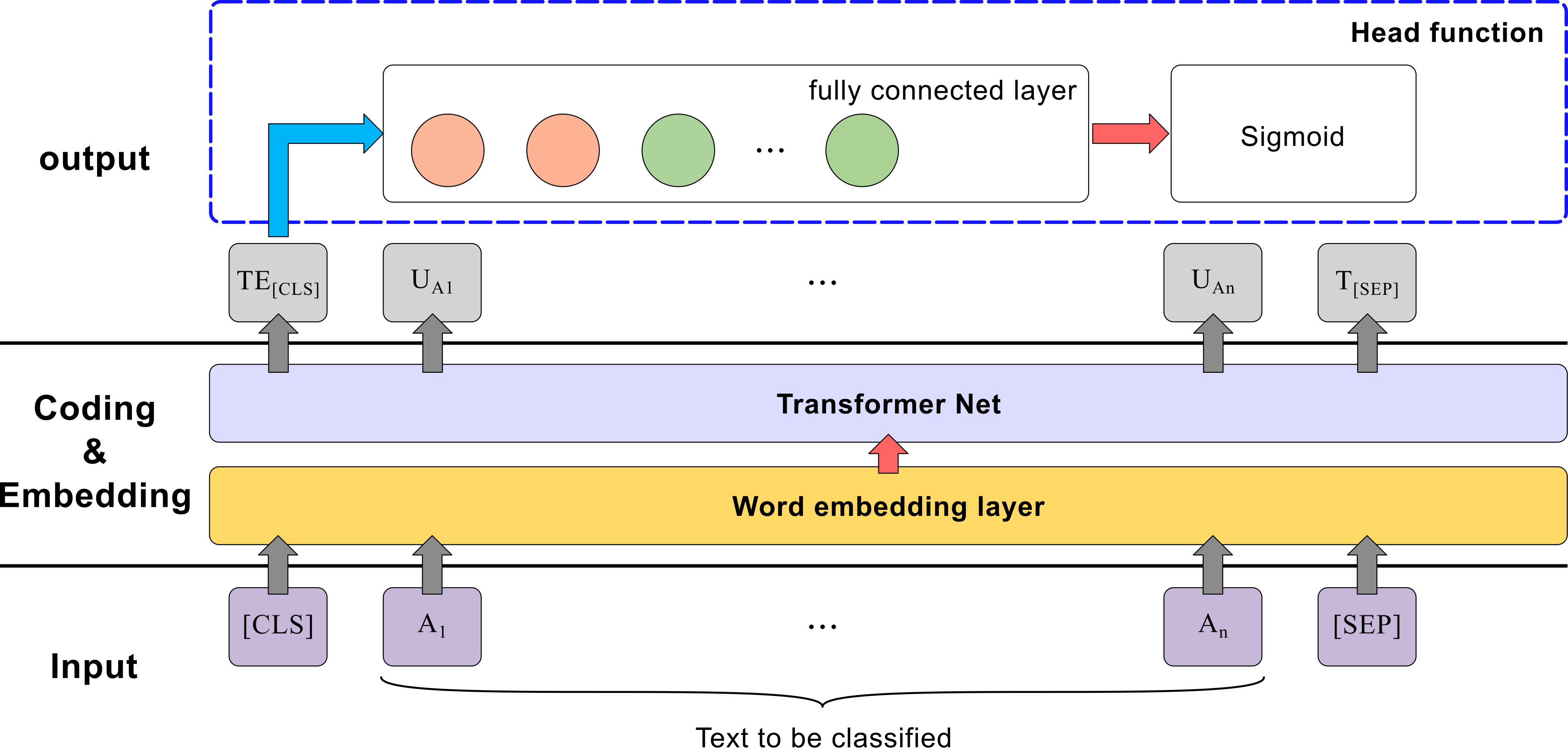
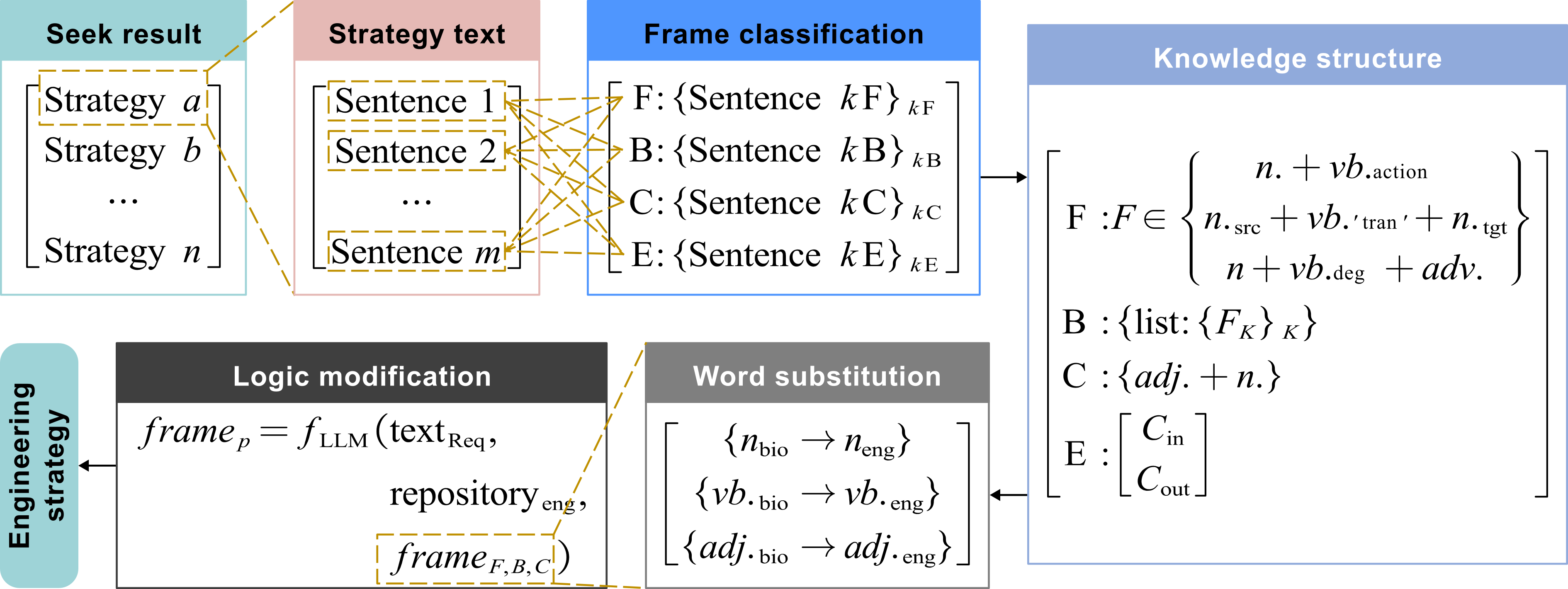
2) Teaching AI to read biology and “translate” it
The team used LLMs, a kind of AI that understands text, to read thousands of sentences from biology sources about animal movement and structures.
- The AI labeled each sentence with F, B, C, and E tags (a sentence can have more than one tag).
- Then, using this labeled info, the AI rewrote the ideas in engineering language. For example, it might replace “muscle contraction” with “soft actuator pressurization” if that matches what engineers can build.
- Finally, the system checked the logic against an engineering knowledge base and cleaned up mistakes, so the ideas make sense for real machines.
3) Choosing the best idea fairly
Often, there’s more than one good nature-inspired idea. The authors used a fair scoring method called multi-criteria decision making to rank them.
- They used a method named VIKOR, which is like finding the best overall compromise when you have many goals (for example: performance, cost, reliability).
- Experts can adjust what matters most (like speed vs. energy use), and the method ranks the options without forcing perfect agreement.
4) Trying it on underwater soft robots
They applied everything to design soft robots that move underwater. They broke the problem into levels:
- Component level: parts like soft actuators and valves.
- Subsystem level: power and pressure control.
- System level: the robot’s overall movement plan.
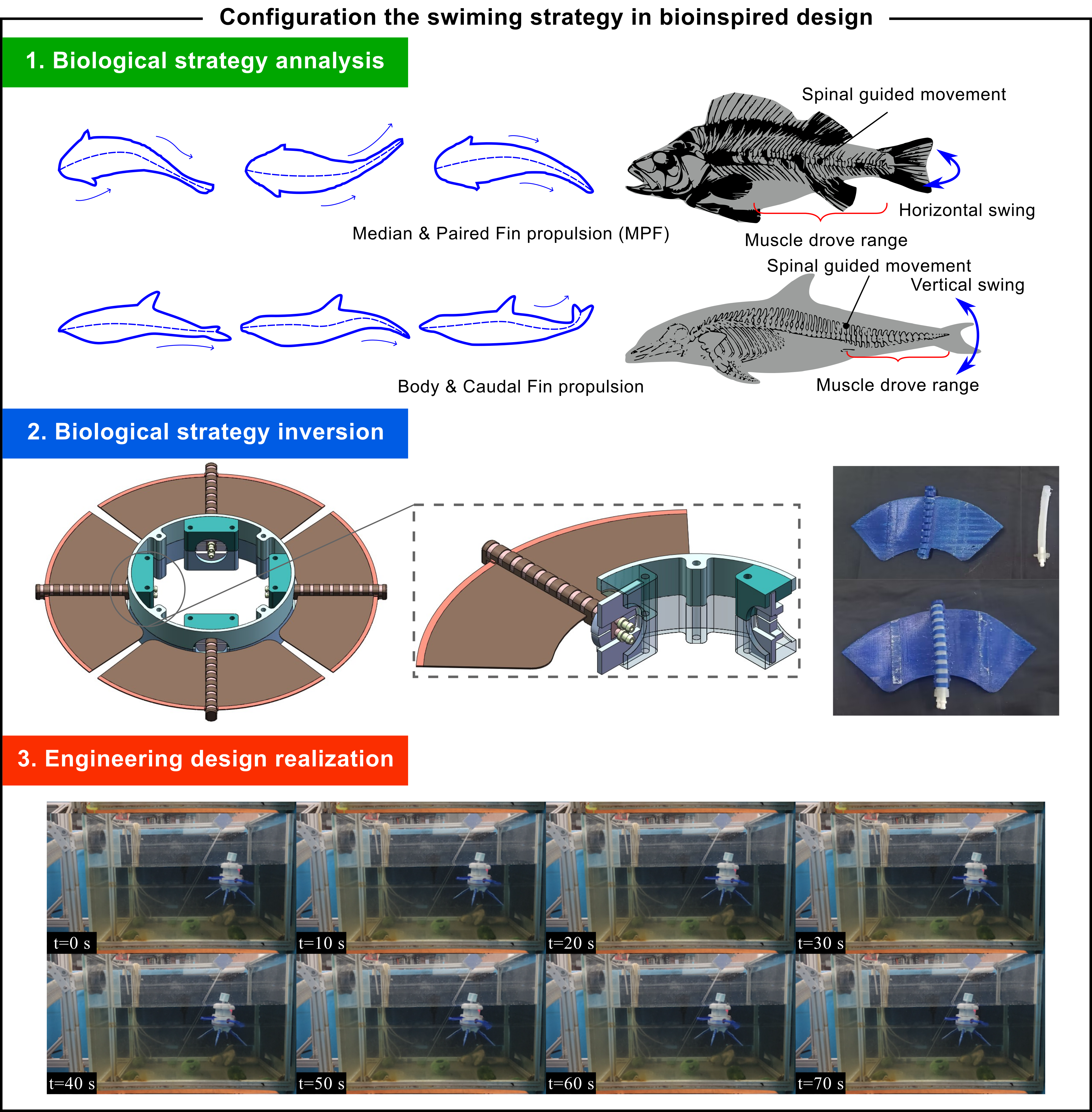
They built and tested three kinds of motion:
- Tail swing (like fish/whales, using a flapping fin).
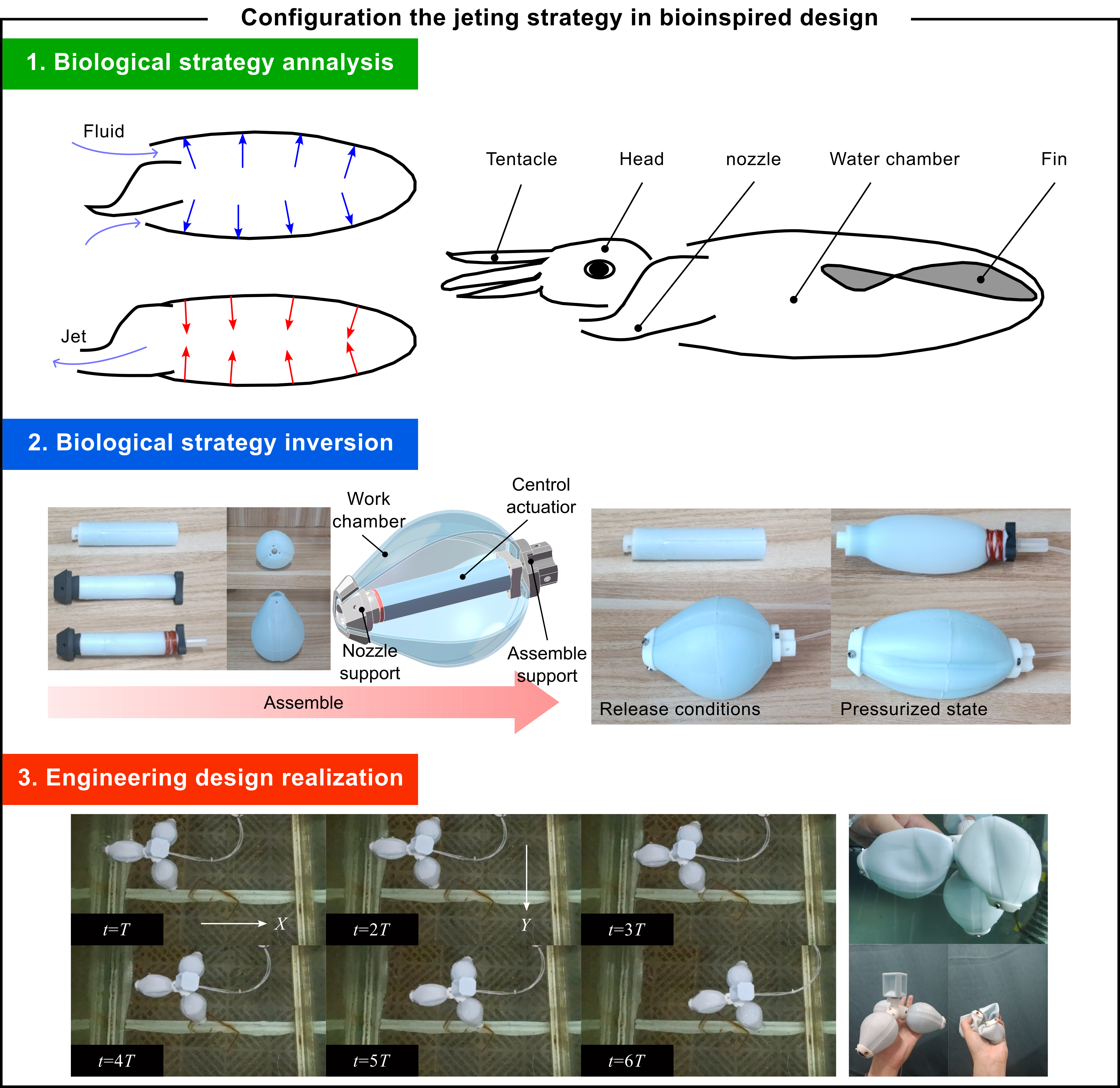
- Jet propulsion (like squids, pushing water out through a nozzle).
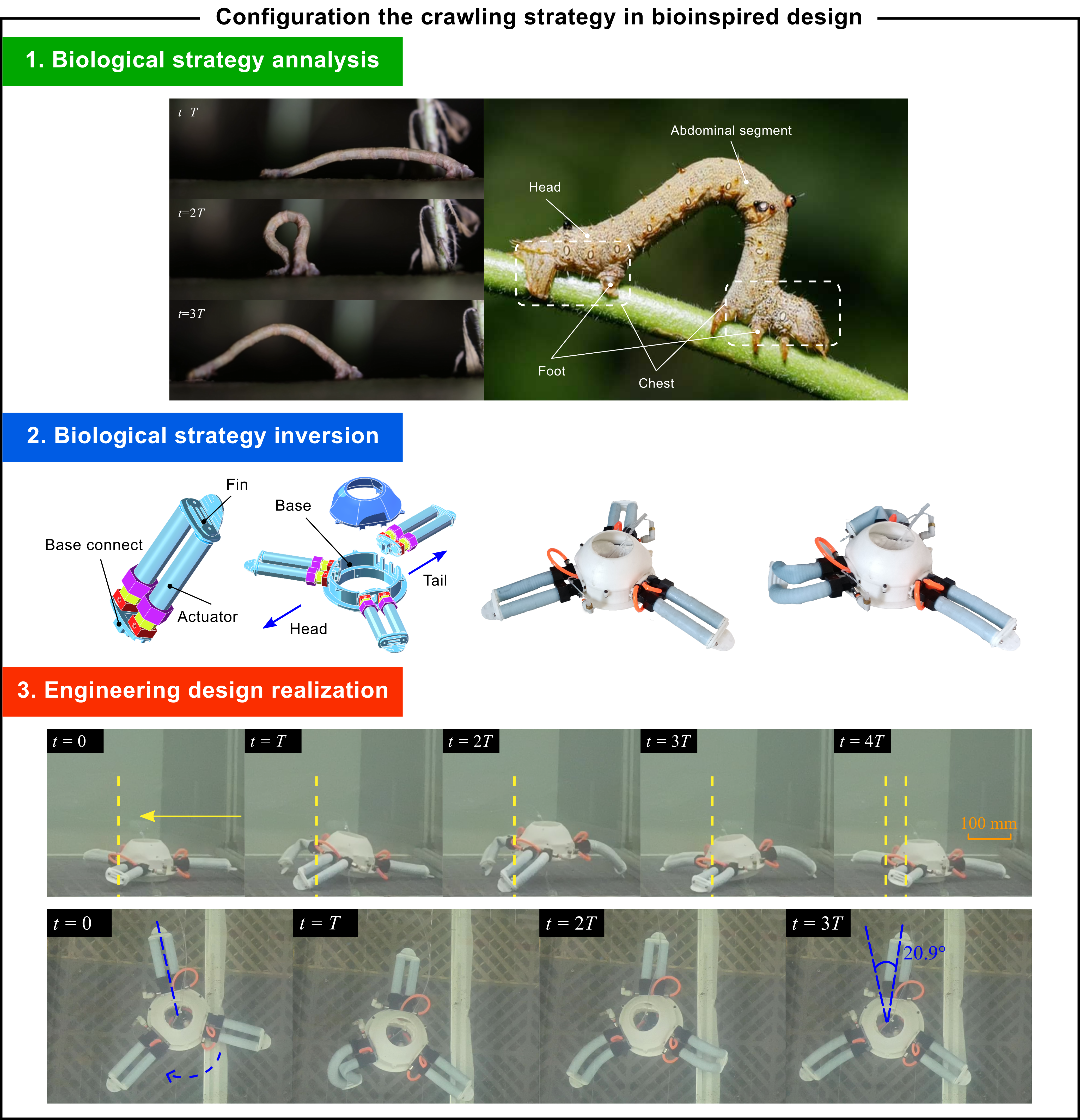
- Crawling (like inchworms, using a squeeze-and-release wave).
What did they find?
Here are the key results the authors report:
- Their framework makes it faster and more organized to turn biology ideas into engineering designs, using AI to do much of the reading and sorting.
- They built working soft robot modules:
- Tail-fin swimming: a tetherless robot that moved at about 1.42 mm/s in tests.
- Squid-like jet: a soft jet unit reaching about 24 mm/s at 100 kPa.
- Inchworm-style crawl: moved about 46 mm per pressure cycle and could turn about 21° per cycle.
- They improved soft actuators:
- A fiber-guided actuator showed about 37% better motion by combining different fiber directions.
- Spider-leg-inspired hydraulic parts offered smoother control and quick, low-loss connections.
- Overall, combining these strategies led to about 18–32% energy efficiency gains in their multimode underwater system.
Why does this matter?
This work shows a practical way to turn nature’s smart designs into real machines:
- It reduces guesswork: the F-B-C-E template and AI help teams quickly find and translate biological ideas.
- It helps teams choose wisely: the ranking method balances speed, stability, cost, and other needs.
- It works in the real world: the team built and tested underwater soft robots, proving the approach can deliver.
Looking ahead, the authors plan to:
- Build better physics models of thrust and motion.
- Use detailed scanning and simulations to copy biology more precisely.
- Create shared measures so different animal-inspired motions can be compared fairly.
In short, this research could speed up bio-inspired inventions in robotics and beyond, helping engineers reuse nature’s best strategies to make machines that are more flexible, efficient, and adaptable.
Collections
Sign up for free to add this paper to one or more collections.