- The paper presents a modular soft gripper that leverages whole-body proprioceptive morphing to robustly grasp objects across a 10× scale range.
- It integrates self-sensing pneumatic actuators with a kirigami-inspired design and hierarchical control to enable smooth transitions between precise and enveloping grasps.
- Experimental validation shows 100% success on optimized configurations and reliable contact detection, highlighting the gripper’s potential for adaptive robotic manipulation.
Whole-Body Proprioceptive Morphing: Modular Soft Gripper for Robust Cross-Scale Grasping
Introduction and Motivation
The paper presents a modular soft gripper architecture that leverages whole-body proprioceptive morphing to achieve robust cross-scale grasping. Drawing inspiration from biological manipulators such as the octopus, which exhibit adaptive reconfiguration of their entire body for manipulation across diverse object scales and geometries, the proposed system overcomes the limitations of conventional soft grippers constrained by fixed global morphology. The architecture integrates distributed actuation and embedded sensing, enabling the gripper to intelligently reconfigure its topology and transition seamlessly between precise pinch and large envelope grasps. This approach expands the operational envelope, enhances generalization to irregular objects, and unlocks novel manipulation modalities.
System Architecture and Design
The gripper is constructed from a network of modular, self-sensing pneumatic actuators. The mechanical design comprises two actuator types: morphing palm actuators for global shape control and grasping finger actuators for local object envelopment. The palm actuators, based on kirigami-inspired PneuNet architecture, allow the gripper to morph its framework into various polygonal shapes (kite, rectangle, trapezoid), while the finger actuators provide compliant contact for secure grasping.
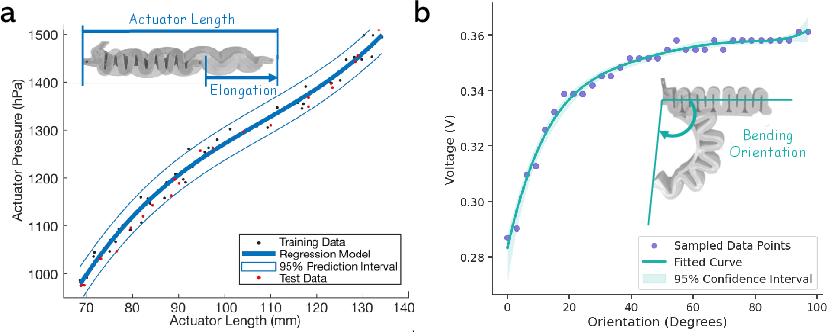
Figure 1: Characterization of palm and finger actuators shows predictable pressure-displacement relationships, enabling precise control over extension and bending for shape morphing and grasping.
The modularity is achieved via multi-material 3D printing (TPU and PLA), facilitating rapid prototyping, repair, and scalability. The actuators exhibit repeatable pressure-displacement characteristics, essential for closed-loop control. The palm actuators' controllability enables the generation of a shape manifold, allowing the gripper to pre-shape itself for diverse objects.
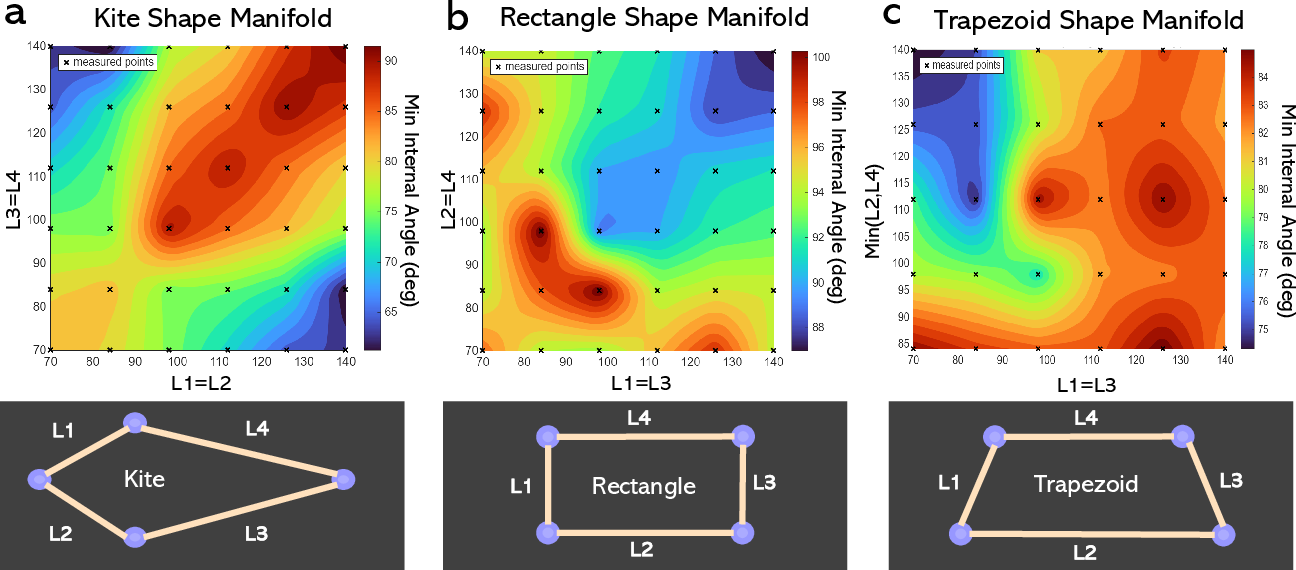
Figure 2: Heatmaps illustrate the palm module's ability to interpolate between target shapes by adjusting link lengths, supporting dynamic reconfiguration for object-specific grasping.
Sensing, Electronics, and Control
Embedded flexible bending sensors in the fingers and pressure sensors in the palm actuators provide rich proprioceptive feedback. A Raspberry Pi Pico microcontroller orchestrates parallel control loops for each module, with custom PCBs and L298N drivers managing solenoid valves for independent pneumatic actuation. The hierarchical control strategy separates low-level actuator regulation (PID-based pressure control) from high-level grasping logic.
The adaptive grasping policy consists of three phases: initialization (open configuration), global reconfiguration (palm morphing to match object scale), and envelopment (fingers actuate until contact is detected via sensor thresholding). Contact state detection is implemented by analyzing the rate of change in filtered sensor signals, registering contact events when the signal exceeds a predefined threshold.
Experimental Validation
The gripper's performance was evaluated on a diverse set of standardized and real-world objects, spanning a 10× scale range. Experiments demonstrated that fixed-morphology configurations are insufficient for robust grasping across scales and shapes. Only dynamic, whole-body morphing enabled successful manipulation of all objects.
(Figure 3)
Figure 3: The gripper adapts its global shape during approach and executes an enveloping grasp, mimicking biological manipulators.
(Figure 4)
Figure 4: System architecture showing modular palm and finger actuators, distributed sensing, and hierarchical control for adaptive grasping.
Figure 1: Actuator characterization validates precise control over extension and bending, supporting reliable morphing and grasping.
Figure 2: Shape manifold characterization demonstrates the gripper's ability to interpolate between multiple polygonal configurations.
(Figure 5)
Figure 5: Grasping sequences for standard and irregular objects illustrate the gripper's versatility and secure manipulation across scales.
(Figure 6)
Figure 6: Sensor readings during grasping trials show clear state transitions from non-contact to contact, validating the proprioceptive feedback and contact detection algorithm.
(Figure 7)
Figure 7: Novel grasping modalities, including multi-object and internal hook grasping, are enabled by the modular, morphing architecture.
Numerical Results and Claims
- The gripper robustly grasped objects with a size ratio up to 10×, outperforming fixed-morphology designs.
- Success rates for standardized objects were 100% when the palm configuration matched the object geometry and scale, but dropped to 0% for mismatched configurations, underscoring the necessity of dynamic morphing.
- Real-world grasping success was contingent on the ability to select appropriate palm shapes, with the kite configuration uniquely enabling stable caging of cylindrical objects.
- Proprioceptive sensing reliably detected contact events, with the transition point algorithm consistently identifying the onset of secure grasping.
Implications and Future Directions
The integration of distributed actuation and embedded sensing in a modular, low-cost framework establishes a scalable pathway toward biologically inspired dexterity in robotic manipulation. The architecture supports rapid fabrication, repair, and reconfiguration, making it suitable for research, education, and deployment in unstructured environments. The demonstrated manipulation modalities—multi-object grasping and internal hook grasping—extend the functional repertoire beyond conventional designs.
Future work will focus on augmenting the gripper's intelligence via tactile sensing and learning-based control policies for complex tasks such as in-hand manipulation. Physical scalability will be explored to address applications ranging from delicate agricultural harvesting to robust logistics automation.
Conclusion
The paper introduces a paradigm of proprioceptive morphing for soft robotic grippers, enabling robust cross-scale grasping through collaborative, whole-body reconfiguration. The modular, sensor-integrated design expands the grasping envelope, enhances generalization, and unlocks novel manipulation strategies. The results substantiate the claim that dynamic, whole-body morphing is essential for achieving biological levels of dexterity in robotic manipulation, with significant implications for future research in adaptive, sensor-driven soft robotics.

