- The paper introduces AhaRobot, a novel low-cost open-source bimanual mobile manipulator designed to reduce cost barriers in Embodied AI research.
- It employs a dual-motor control system with backlash and static friction compensation alongside the RoboPilot teleoperation method, enhancing data collection efficiency by 30%.
- Experimental results validate AhaRobot’s robust performance in complex household tasks and long-horizon operations, paving the way for scalable autonomous research.
AhaRobot: A Low-Cost Open-Source Bimanual Mobile Manipulator for Embodied AI
Introduction
The paper "AhaRobot: A Low-Cost Open-Source Bimanual Mobile Manipulator for Embodied AI" (2503.10070) introduces AhaRobot, a dual-arm mobile manipulation robot designed to overcome high costs and limited accessibility in real-world Embodied AI research. Despite technological advancements, commercial mobile manipulation robots remain prohibitively expensive, constraining research in practical settings. AhaRobot emerges as a solution by offering a cost-effective, open-source platform, significantly undercutting the cost of prevalent robotic systems by utilizing readily available components for a base price of $1,000.</p>
<h3 class='paper-heading' id='system-design-and-features'>System Design and Features</h3>
<p>AhaRobot's architecture embodies three primary elements: a low-cost hardware design, precise control solutions, and an efficient teleoperation method named <a href="https://www.emergentmind.com/topics/robopilot" title="" rel="nofollow" data-turbo="false" class="assistant-link" x-data x-tooltip.raw="">RoboPilot</a>.
<img src="https://emergentmind-storage-cdn-c7atfsgud9cecchk.z01.azurefd.net/paper-images/2503-10070/Aha2.png" alt="Figure 1" title="" class="markdown-image" loading="lazy">
<p class="figure-caption">Figure 1: Overview of AhaRobot. The system costs only \$1,000 for the robot and \$1,000 for extra power and computing. Above left: Hardware Configuration of AhaRobot. Above right: Fully Remote Mobile Manipulation Teleoperation RoboPilot. Below: AhaRobot can perform various tasks in daily life.
Hardware Configuration
The hardware structure of AhaRobot integrates off-the-shelf components, optimizing cost without sacrificing functionality. It features a novel sliding rail for the shoulder joint, minimizing the need for high-torque motors. The system employs dual-motor joints to enhance precision by mitigating backlash and static friction, significantly improving its operational accuracy for daily tasks.
Control System
The control system incorporates dual-motor backlash control and static friction compensation, crucial for maintaining trajectory accuracy. It employs a counter-drive mechanism, applying bias torque to eliminate backlash effectively. This dual-motor strategy is critical in addressing the precision challenges posed by the use of low-cost components.
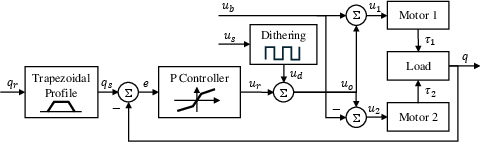
Figure 2: Block Diagram of Dual-Joint Control System.
Teleoperation Method: RoboPilot
RoboPilot facilitates an intuitive teleoperation environment that mirrors piloting simplicity. It enhances data collection efficiency by 30% over traditional 3D mouse and leader-follower systems and supports long-horizon teleoperation without the need for physical proximity or VR setups, enabling comprehensive task management remotely.
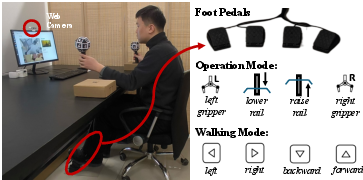
Figure 3: RoboPilot Teleoperation Workstation. By capturing the 6D pose of the handle through a web camera, we can fully remotely teleoperate the robot, with the entire setup costing no more than \$50. Foot pedals can switch between two modes, respectively controlling the base's movement and the upper limbs' operation.
Experimental Results
The experimental evaluation underscores AhaRobot's efficacy in complex manipulation tasks. Through various household applications, the robot demonstrated its ability to complete extensive sequences autonomously, showcasing adaptability in real-world scenarios.

Figure 4: Very Long-horizon Remote Teleoperation. We used RoboPilot to control AhaRobot and demonstrated two specially designed complex tasks. Task 1 involves a very long sequence of operations with a total movement distance exceeding 200m, requiring remote tele-communication, agile movement, and precise environmental interaction. Task 2 specifically showcases AhaRobot's lifting and lowering capabilities, enabling it to touch the ground and complete more complex tasks in everyday life. We also demonstrated AhaRobot's bimanual coordination by opening a microwave and placing sushi inside.
Implications and Future Work
The introduction of AhaRobot holds significant implications for the field of Embodied AI. It provides a scalable platform that not only reduces the financial barrier to entry but also lays the groundwork for future developments in teleoperation and autonomous manipulation. The open-source nature of the system encourages community-driven enhancements and widespread adoption in research and practical applications. Looking forward, enhancing collision sensing and reducing latency in dynamic tasks remain key areas for innovation.
Conclusion
AhaRobot presents a transformative advancement in making bimanual mobile manipulators accessible for real-world applications, promoting equitable participation in robotic research across varied economic contexts. Its comprehensive design and robust control capabilities are set to catalyze further advancements in Embodied AI, supporting large-scale data collection and exploration in autonomous task execution. This initiative sets a precedent for the future direction of low-cost, high-functionality robotic systems.

