- The paper introduces a novel morphology-conditioned geometry matching method that improves grasp generalization across diverse robot end-effectors.
- It employs graph convolutional networks combined with self- and cross-attention to correlate gripper and object geometries for accurate contact point prediction.
- The approach enables robust zero-shot generalization on unseen grippers, setting the stage for more adaptive robotic manipulation systems.
GeoMatch++: Enhancing Grasp Generalization through Morphological Insights
Introduction
The paper "GeoMatch++: Morphology Conditioned Geometry Matching for Multi-Embodiment Grasping" (2412.18998) addresses substantial challenges in the domain of robot dexterous grasping, especially focusing on generalization across different robot end-effectors. Traditional approaches have made strides with single grippers or unseen objects, yet they commonly show limited capacity to generalize to unseen robotic grippers. GeoMatch++ introduces a novel methodology that employs robot morphology as a pivotal factor, leveraging its inherent information to enhance the learning of geometry correlations between the gripper and object, thus facilitating cross-embodiment grasping.
Methodology and Architecture
The core of GeoMatch++ is its ability to correlate geometry features of grippers and objects under varying gripper morphologies. Robot morphology, representing how joints and links are articulated, is crucial for grasping tasks. The model utilizes attention mechanisms on morphology graphs to learn enhanced geometry features, effectively predicting contact points for diverse and stable grasps.
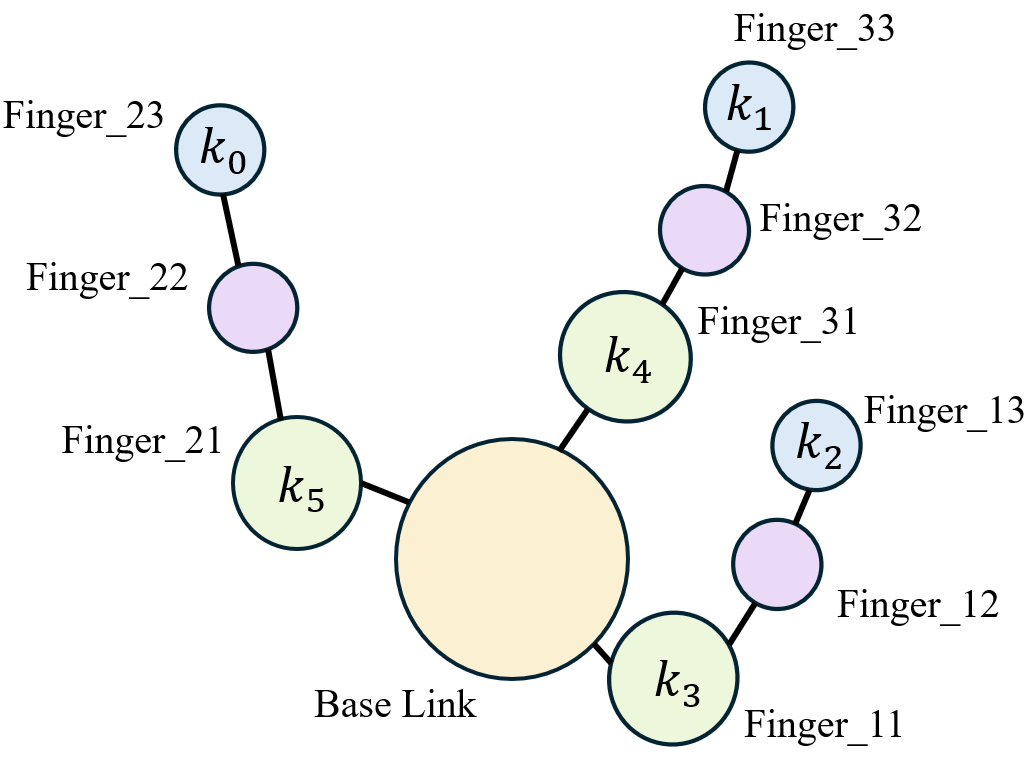
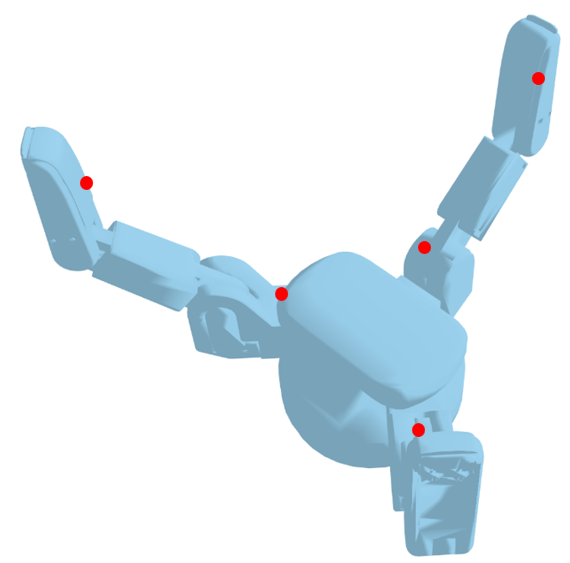
Figure 1: Sample morphology graph for Barrett hand with labelled keypoints.
The architecture (Figure 2) exploits Graph Convolutional Networks (GCNs) to encode object and morphology features. These are processed through self-attention and cross-attention transformers, capturing correspondence between object point clouds and robot morphology, yielding enhanced embeddings used for autoregressive contact point prediction. The model's training employs a well-structured loss function combining geometric embedding loss and contact prediction loss to refine grasp prediction accuracy.
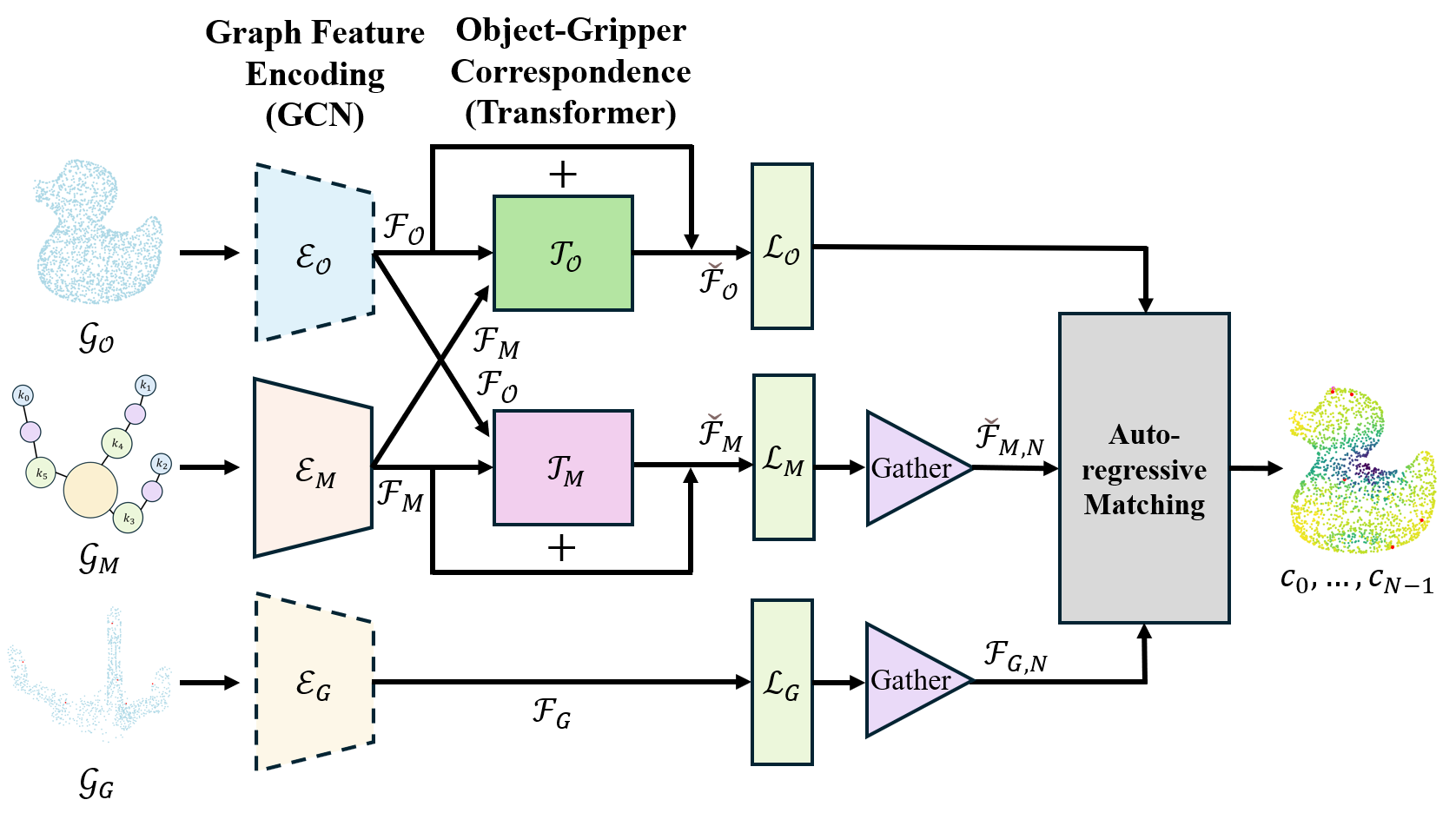
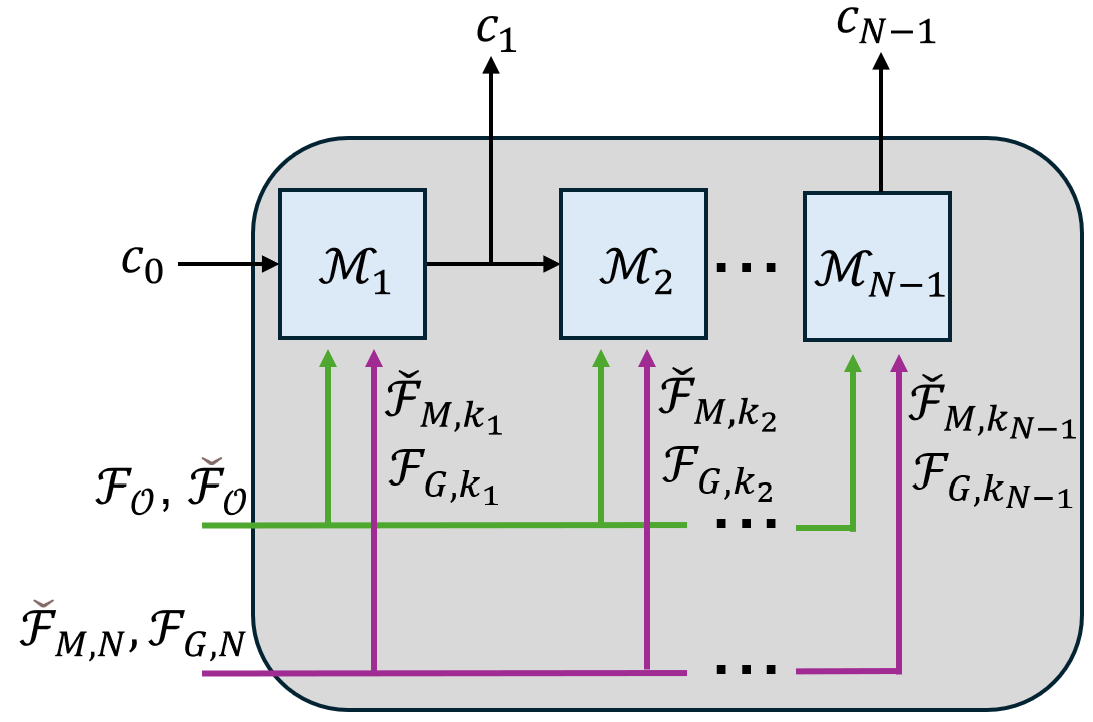
Figure 2: Model architecture.
Experimental Results
GeoMatch++ was benchmarked against leading methods such as GeoMatch and GenDexGrasp. The proposed model demonstrated a notable increase in grasp success rates by 9.64% on out-of-domain end-effectors. Specifically, its effective handling of unseen grippers, evidenced by maintaining a high success rate with minimal performance loss compared to in-domain scenarios, underscores the robustness of the morphology-attention method.
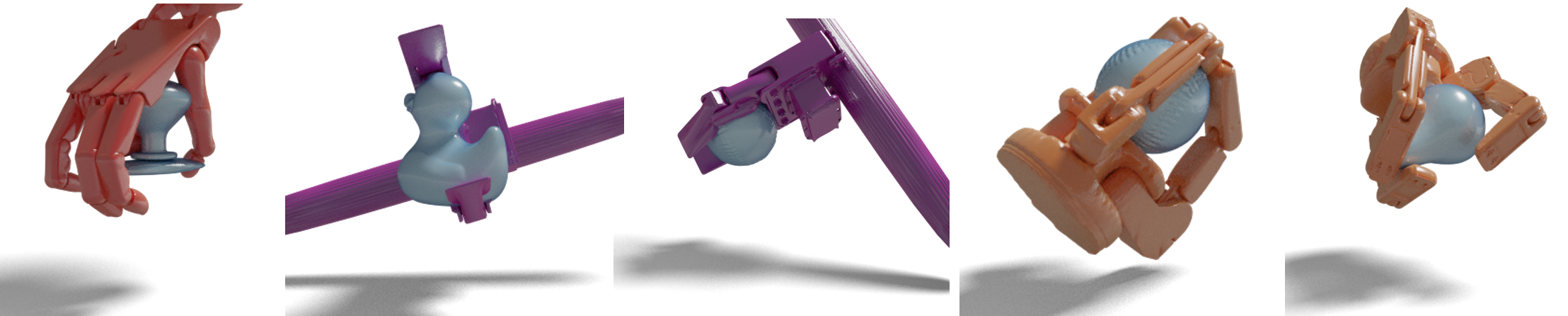
Figure 3: Qualitative grasp results on unseen grippers.
The experimental evaluations utilized asseverate metrics for grasp success and diversity, including assessing standard deviations of joint angles across successful grasps, enhancing the model's comprehensiveness in practical applications.
Discussion and Implications
GeoMatch++'s utilization of robot morphology not only advances multi-embodiment dexterous grasping but also ignites new avenues in robotics research. Its framework facilitates zero-shot generalizations, laying the groundwork for adaptive systems capable of handling varied robotic hand configurations without additional training. This approach is pivotal for deploying robots in real-world settings where adaptability to different hardware embodiments is mandatory.
The implications of this research extend beyond grasping tasks. By demonstrating effective attention-based morphology learning, GeoMatch++ suggests potential applications in broader robotics challenges, including manipulation and interaction tasks involving diverse robot architectures.
Conclusion
GeoMatch++ significantly enhances the generalization capabilities of robotic systems tasked with dexterous grasping by leveraging detailed robot morphology insights. Its methodological innovations in geometry correlation and grasp prediction set new benchmarks in the multi-embodiment grasping domain, enabling improved adaptability and performance across varied robotic grippers. Future directions will likely explore extending this approach to dynamic environments and multiple concurrent robot interactions, further amplifying the impact of morphology-conditioned learning in robotics.