- The paper introduces an equivariant grasp synthesis method that generalizes to multiple gripper designs while utilizing less than half the typical data volume.
- It leverages a geometric scene encoder and a kinematics encoder with Wigner-D matrices to transform joint configurations efficiently.
- Experimental results demonstrate competitive grasp success rates and highlight potential for zero-shot synthesis in versatile robotic applications.
Towards a Multi-Embodied Grasping Agent
Introduction
The paper "Towards a Multi-Embodied Grasping Agent" (2510.27420) presents an innovative approach to multi-embodiment grasping in robotics, focusing on designing a system that works efficiently across various gripper designs and degrees of freedom. It addresses challenges associated with generalizing robotic grasping techniques to diverse gripper architectures without requiring extensive, large-scale data. The authors propose a flow-based equivariant grasp synthesis architecture that intelligently utilizes the kinematic models derived from gripper and scene geometry, achieving smoother learning and faster inference. This approach is notable for its implementation in JAX, offering advanced batching capabilities that enhance performance and memory efficiency.
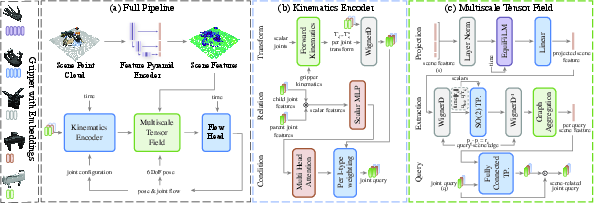
Figure 1: Method Overview. (Left) Grippers are represented with per-joint equivariant embeddings. (a) Full Pipeline: Scene point cloud encoded into a multi-scale equivariant feature pyramid. (b) Kinematics Encoder: Uses joint and kinematic values for transformation. (c) Multiscale Tensor Field: Hierarchical features time-conditioned with an equivariant FiLM layer.
Method Overview
The proposed method begins by encoding scene point clouds into a feature pyramid through a geometric scene encoder. This pyramid facilitates efficient querying of pose and joint information. The kinematics encoder then processes joint values and applies transformations to embeddings using Wigner-D matrices, enabling interaction between parent-child features. The multiscale tensor field conditions hierarchical features on time using equivariant techniques, allowing detailed extraction and manipulation of grasp-related scene data.
A central innovation in this work is the application of equivariant layers throughout the model's architecture, leveraging symmetries to enhance robustness and generalization. The architecture's design aims at efficiently capturing the multimodal nature of grasping data, which has become a defining feature in state-of-the-art robotic grasping.

Figure 2: Multi-Embodiment Grasp Synthesis Examples: Renderings of sampled pre-grasp configurations for distinct grippers in cluttered scenes.
Equivariant Gripper Embeddings
The paper describes a sophisticated method for encoding the kinematics of various grippers into the system, thereby facilitating the synthesis of stable pre-grasp configurations. Gripper embeddings are transformed according to their joint states, with the model ensuring that feature representations covary with physical states via the Wigner-D matrix operations. This geometric representation is fundamental to precisely modeling gripper dynamics and predicting successful grasp outcomes.
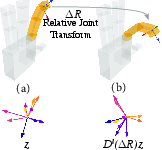
Figure 3: Equivariant Gripper Embeddings: Initial gripper configuration represented by a feature embedding that is transformed via the Wigner-D matrix after joint rotation.
Experimental Results
The authors report that their method, despite using less than half the available data for successful grasps, maintains competitive grasp success rates compared to state-of-the-art models—particularly highlighting OrbitGrasp (2510.27420). The robust experimental setup demonstrates the method's capability to generalize across different grippers, with the multi-embodiment model showing clear performance advantages. Evaluation focuses on grasp success rates across several benchmark settings, underscoring the flexibility and applicability of the proposed approach.
Implications and Future Directions
The equivariant approach described promises substantial contributions to the field of robotic manipulation, particularly in environments where adaptability to various gripper types is required. By focusing on geometry and symmetries, the system enhances the robustness of robotic grasping across multiple scenarios. However, limitations exist, notably in real-time applicability and the current need for manually implemented kinematic models.
Future work could explore automated generation of kinematic encoders, potentially leveraging larger datasets for diverse gripper embodiments. Additionally, further optimization of the architecture may enable real-time processing, which is crucial for practical robotic applications. Emphasizing zero-shot grasp synthesis for unseen grippers remains an exciting frontier, which could revolutionize autonomous manipulation capabilities.
Conclusion
The paper "Towards a Multi-Embodied Grasping Agent" provides a significant step forward in equivariant robotic grasp synthesis, illustrating a balance between efficiency and generalization across multiple gripper embodiments. Its JAX-based implementation ensures advanced performance and scalability. These capabilities have broad implications for the future development of versatile grasping systems, promoting adaptability and efficiency in robotic manipulation tasks.