- The paper introduces a novel framework that abstracts generative modeling to learning the infinitesimal generators of arbitrary Markov processes.
- It formulates a conditional generator matching loss using Bregman divergences to ensure stable training, effective model superposition, and multimodal extensions.
- Empirical results show that combining jump, flow, and diffusion models improves image and protein generation, yielding state-of-the-art performance on diverse tasks.
Generator Matching: A Unified Framework for Generative Modeling with Arbitrary Markov Processes
Introduction and Motivation
Generator Matching (GM) introduces a modality-agnostic framework for generative modeling that leverages the infinitesimal generators of arbitrary Markov processes. The central abstraction is the generator Lt, which characterizes the infinitesimal evolution of a Markov process and thus the evolution of probability distributions over time. This approach generalizes and unifies existing generative modeling paradigms—including denoising diffusion models, flow matching, and discrete diffusion—by formulating them as special cases of generator learning. GM further expands the design space to include previously unexplored Markov processes, such as jump processes, and enables rigorous construction of multimodal and superposed generative models.
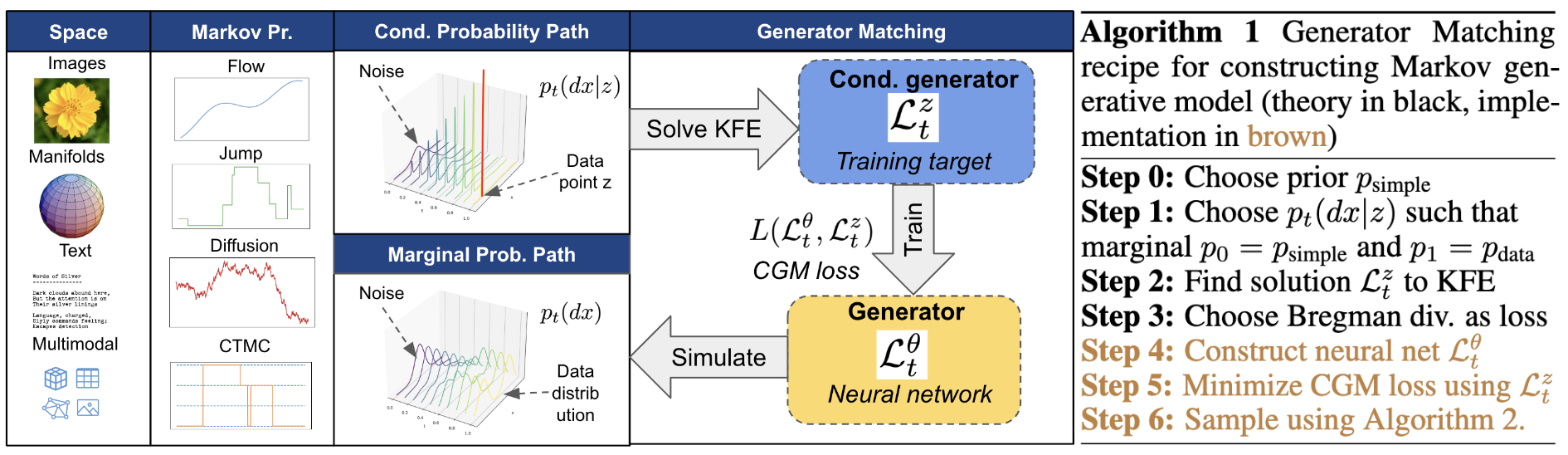
Figure 1: Overview of the Generator Matching (GM) framework, illustrating its applicability to arbitrary state spaces and Markov processes.
Mathematical Foundations
Probability Paths and Conditional Marginals
GM formalizes generative modeling as the construction of a probability path (pt)t∈[0,1] that interpolates between a tractable prior p0 and the data distribution p1. The conditional probability path pt(dx∣z), parameterized by data point z, is designed to be easy to sample from, enabling scalable training via conditional sampling. The marginal path is then pt(dx)=Ez∼p1[pt(dx∣z)].
Markov Processes and Generators
A Markov process (Xt)t∈[0,1] is defined by its transition kernel kt+h∣t, with the generator Lt capturing the infinitesimal change in the distribution. The generator is formally defined via test functions f as
Ltf(x)=h→0limhE[f(Xt+h)∣Xt=x]−f(x)
and admits universal representations on discrete and Euclidean spaces:
- Discrete: Ltf(x)=fTQtT (rate matrix Qt)
- Euclidean: Ltf(x)=∇f(x)Tut(x)+21∇2f(x)⋅σt2(x)+∫[f(y)−f(x)]Qt(dy;x)
This characterization exhaustively describes the design space for Markovian generative models on Rd and discrete spaces.
Kolmogorov Forward Equation (KFE)
The evolution of the marginal distribution is governed by the KFE:
∂tEx∼pt[f(x)]=Ex∼pt[Ltf(x)]
Given a conditional generator Ltz for pt(⋅∣z), the marginal generator is
Ltf(x)=Ez∼p1∣t(⋅∣x)[Ltzf(x)]
This linearity enables scalable training and model combination.
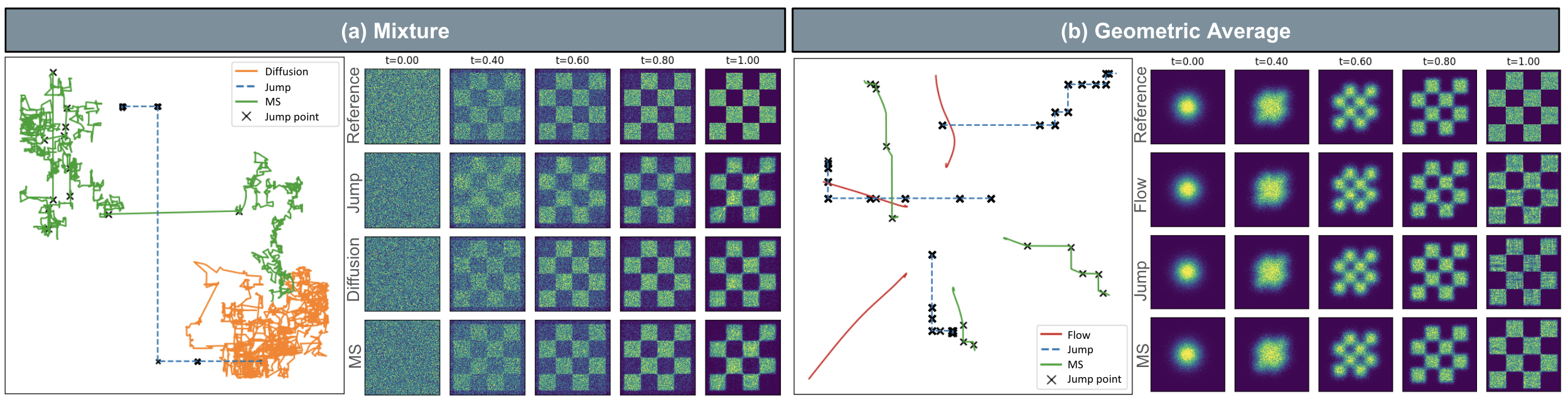
Figure 2: Illustration of sample paths and marginal distributions for different Markov models trained on the same probability path. Marginals are preserved despite distinct sample trajectories.
Training via Generator Matching
Conditional Generator Matching Loss
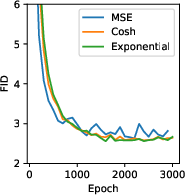
GM trains a parameterized generator Ltθ (typically via a neural network) to approximate the true marginal generator. The loss is formulated as a conditional generator matching (CGM) objective using Bregman divergences:
Lcgm(θ)=Et,z,x∼pt(⋅∣z)[D(Ftz(x),Ftθ(x))]
where Ftz is the conditional parameterization and D is a Bregman divergence (e.g., MSE, KL). The key result is that minimizing the CGM loss is equivalent (in gradient) to minimizing the intractable marginal generator loss, provided D is a Bregman divergence.
Implementation
Model Combinations and Multimodal Extensions
Markov Superpositions
The linearity of generators and the KFE allows for superposition of models:
Ltsuper=αt1Lt+αt2Lt′
where αt1+αt2=1. This enables combining flows, diffusions, and jumps, yielding improved performance and flexibility.
Multimodal Modeling
GM rigorously constructs multimodal generative models by combining unimodal generators on product spaces S1×S2. The marginal generator is the sum of the unimodal generators, and training decomposes into independent losses per modality, greatly simplifying high-dimensional and multimodal generative modeling.
Empirical Results
Image Generation
Jump models, a novel class for Rd, are shown to generate realistic images, albeit with lower FID scores than state-of-the-art flow models. However, Markov superpositions of jump and flow models outperform pure flows, especially when combining different samplers.
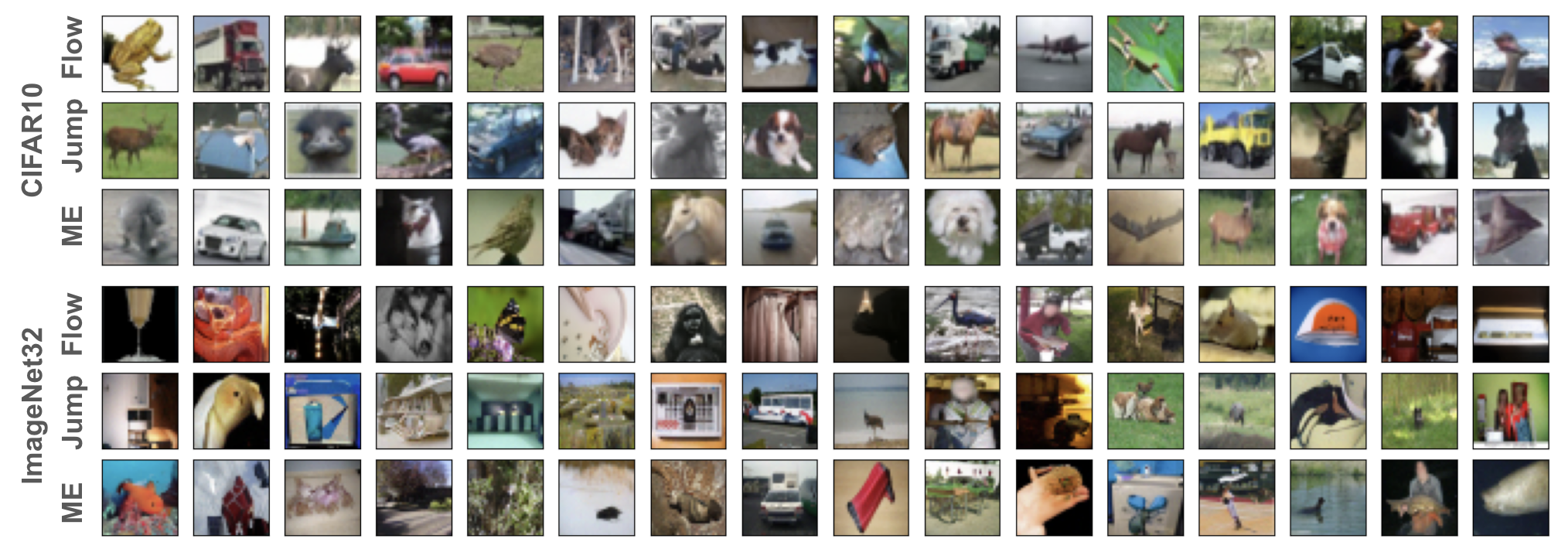
Figure 4: Examples of generated images on CIFAR10 (top) and ImageNet32 (bottom) using jump and flow models.
Protein Structure Generation
GM enables multimodal generative modeling for protein sequence and structure. Incorporating SO(3) jump models into MultiFlow yields state-of-the-art diversity and novelty metrics, outperforming previous baselines.
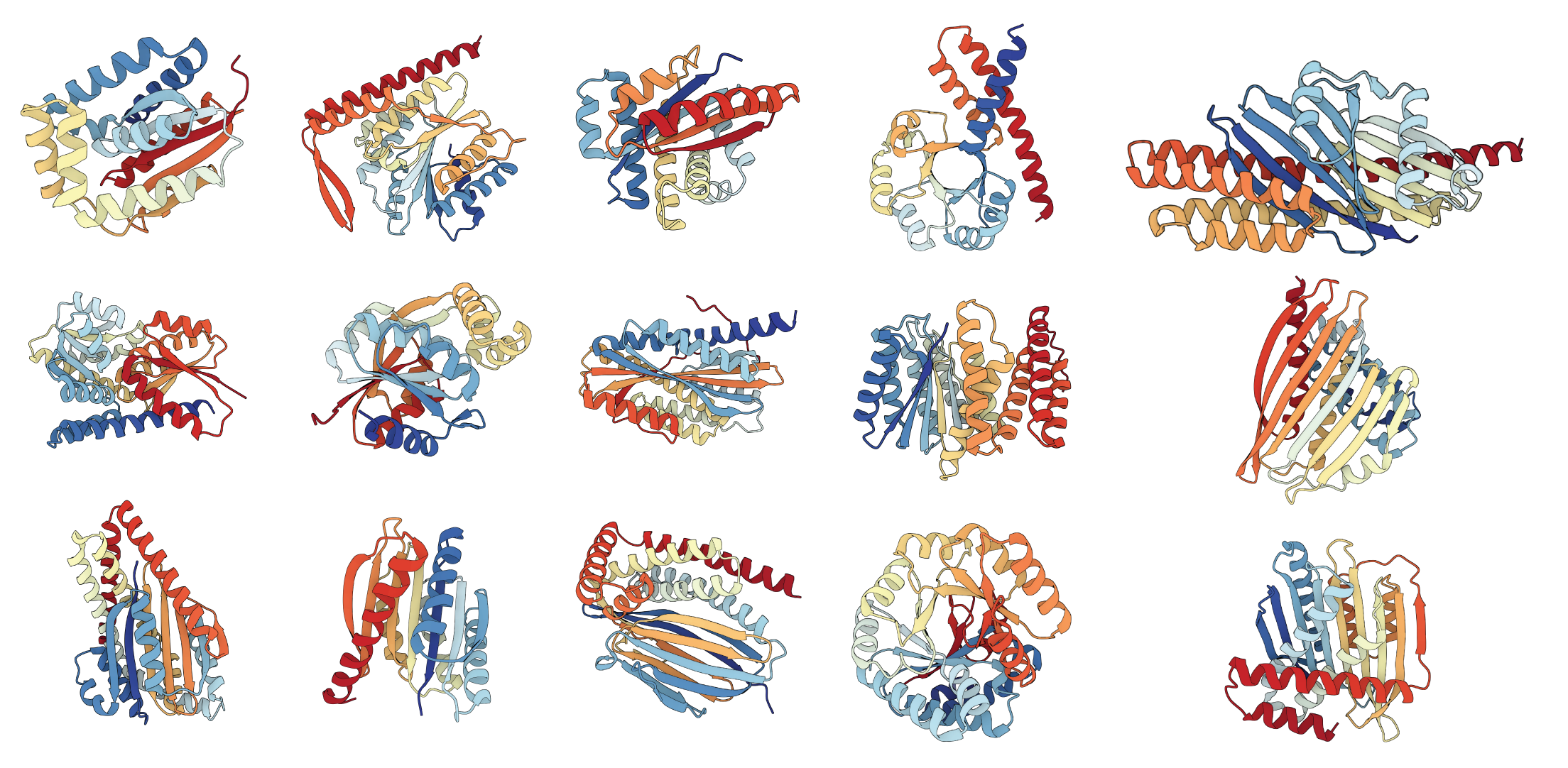
Figure 5: Examples of generated proteins with SO(3) jumps and MultiFlow, each passing designability and being structurally unique.
Systematic Study of Probability Paths and Markov Models
A systematic ablation over probability paths (mixture, CondOT) and Markov model classes (flow, diffusion, jump, superposition) reveals that performance and discretization error are highly dependent on the choice of path and model. Flows excel on CondOT paths, jumps on mixture paths, and superpositions often yield the best results.
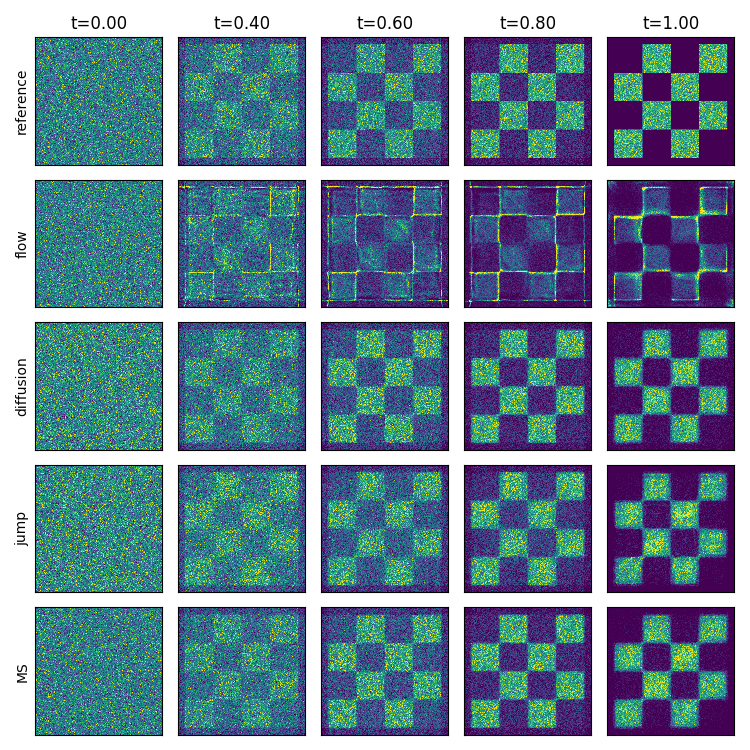
Figure 6: 2D histograms of generated samples for mixture path models, showing jump models outperform flows on discontinuous paths.
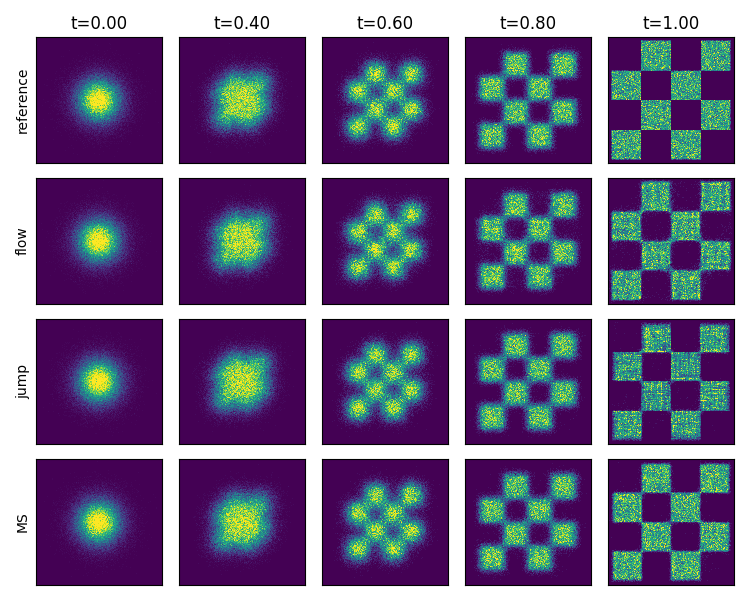
Figure 7: 2D histograms for CondOT path models, with flows outperforming jumps on continuous transport paths.
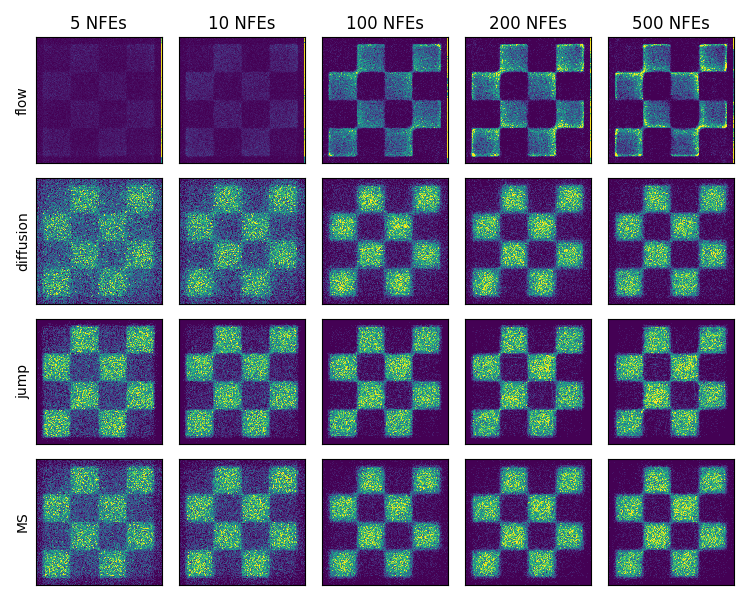
Figure 8: NFE ablation for mixture path, showing jump models are less sensitive to discretization error.
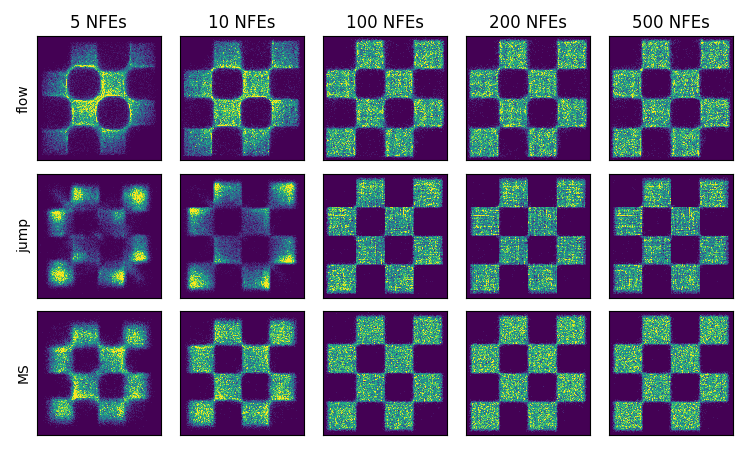
Figure 9: NFE ablation for CondOT path, showing flows are less sensitive to discretization error.
Theoretical and Practical Implications
GM provides a rigorous foundation for generative modeling with arbitrary Markov processes, unifying disparate approaches and enabling principled exploration of new model classes. The framework's linearity facilitates model combination, multimodal extensions, and systematic loss design via Bregman divergences. Practically, GM enables scalable training, flexible architecture choices, and improved sample quality through superposition and multimodal integration.
Future Directions
Potential avenues include:
- Learning state-dependent diffusion coefficients and jump kernels for richer dynamics.
- Developing efficient samplers and distillation techniques to reduce computational cost.
- Extending GM to more complex manifolds and trans-dimensional state spaces.
- Systematic exploration of Bregman divergences for improved training stability and generalization.
Conclusion
Generator Matching establishes a unified, scalable, and theoretically grounded framework for generative modeling with arbitrary Markov processes. By abstracting generative modeling to the learning of infinitesimal generators, GM subsumes existing paradigms and opens new directions for model design, combination, and multimodal integration. The empirical and theoretical results demonstrate the framework's versatility and potential for advancing generative modeling across diverse domains.