- The paper presents a comprehensive survey of neural field frameworks, detailing their impact on 3D scene representation and robotics tasks.
- The paper analyzes key methods including occupancy networks, signed distance fields, neural radiance fields, and 3D Gaussian splatting for precise modeling.
- The paper highlights applications in robotics, noting advancements in pose estimation, manipulation, navigation, and physics simulation.
Neural Fields in Robotics: A Survey
The paper "Neural Fields in Robotics: A Survey" extensively explores the deployment of Neural Fields (NFs) within the context of robotics, highlighting their transformative potential in modeling 3D scenes for diverse robotics applications. It examines various frameworks and applications while critically analyzing their advantages and limitations.
Introduction
Neural Fields have emerged as a powerful tool for 3D scene representation, leveraging differentiable rendering to enable high-fidelity 3D reconstructions and novel viewpoint generation from 2D data. These continuous, compact, and differentiable representations provide significant benefits in robotics for tasks such as perception, planning, and control, particularly in real-time applications. By integrating seamlessly with foundation and generative models, NFs significantly enhance the adaptability and decision-making capabilities of robots.
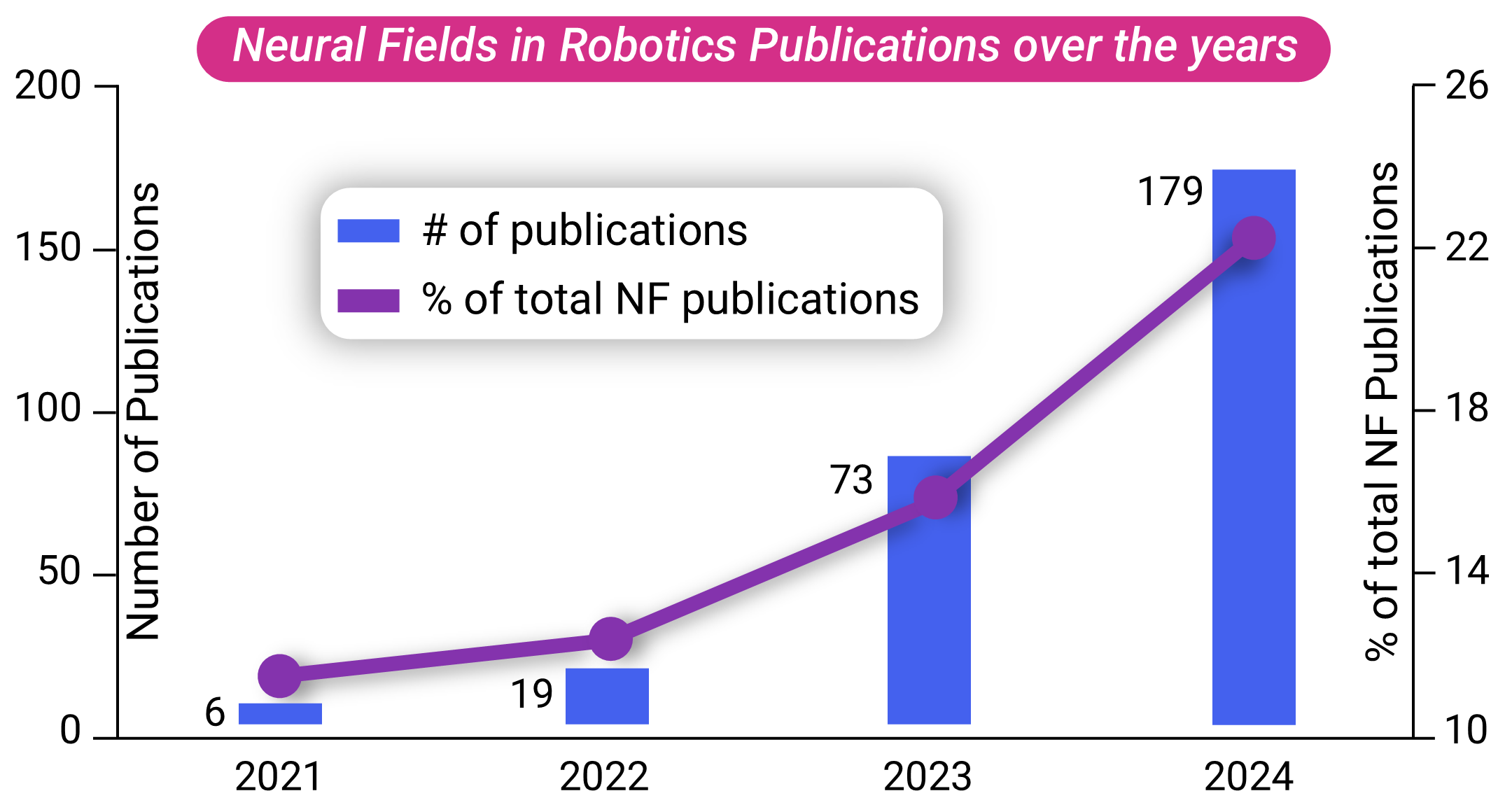
Figure 1: Growth of Neural Fields in Robotics: plotted as a rough number of publications vs. \% of total neural field publications per year.
Core Neural Field Frameworks
The paper outlines four key NF frameworks integral to robotics:
- Occupancy Networks: Utilizes NFs to learn continuous functions mapping 3D points to occupancy probabilities, effectively representing smooth and continuous surface geometries.
- Signed Distance Fields (SDFs): Assigns each spatial point a signed distance to the surface boundary of objects, facilitating efficient representation and manipulation of complex geometric structures.
- Neural Radiance Fields (NeRFs): Employs a neural network to predict radiance and density, enabling photorealistic 3D scene rendering and novel viewpoint synthesis.
- 3D Gaussian Splatting: Models scenes as a collection of anisotropic 3D Gaussians, allowing for efficient view-dependent rendering and modeling of dynamic geometries.

Figure 2: Neural Field Representations: showcasing four core Neural Field representations used in the survey.
Applications in Robotics
Pose Estimation
NFs have shown significant promise in both camera and object pose estimation. Techniques like iNeRF exploit pretrained NeRFs to achieve accurate pose estimation through gradient-based optimization. In SLAM applications, frameworks such as iMap and NICE-SLAM demonstrate real-time camera pose tracking and mapping advancements, leveraging NFs for enhanced environmental understanding.
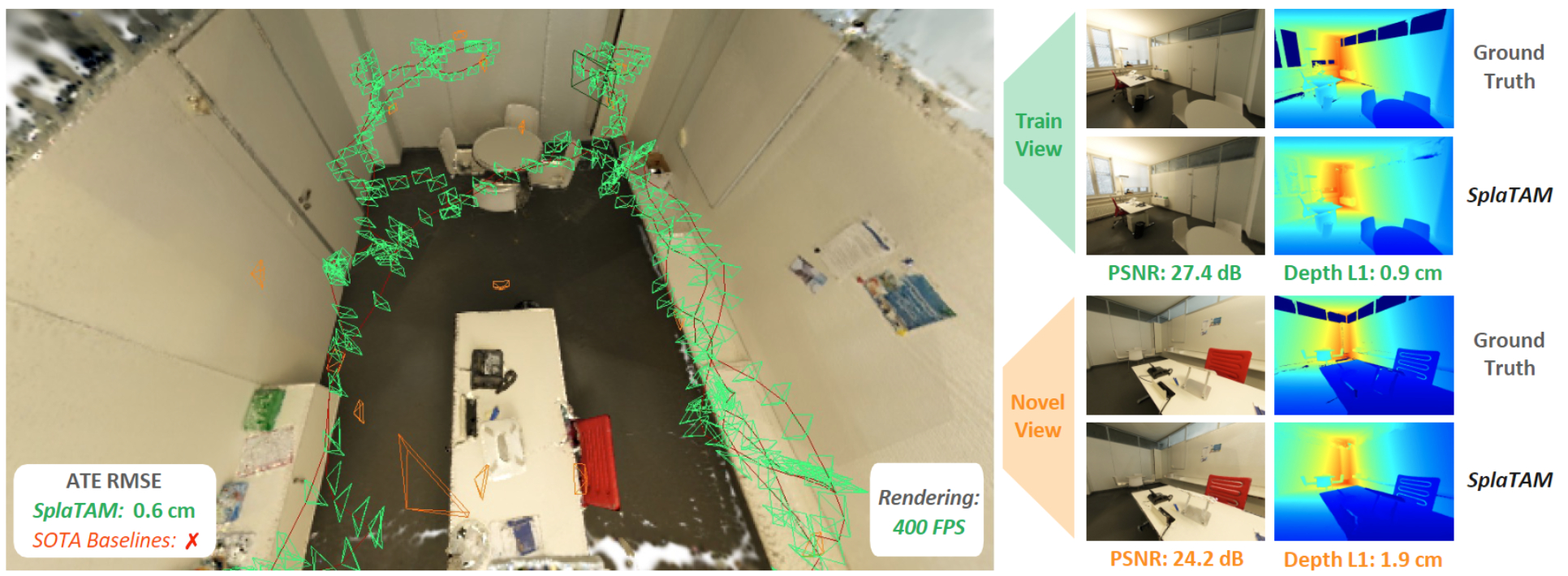
Figure 3: Mapping and tracking results from SplaTam utilize 3D Gaussian splatting for enhanced performance.
Manipulation
Robotic manipulation benefits from the precision and adaptability of NFs. Implementations such as Dex-NeRF enhance grasping abilities for transparent objects, while Neural Descriptor Fields enable 6-DoF grasp pose estimation, improving robotic manipulation accuracy in dynamic and cluttered environments.
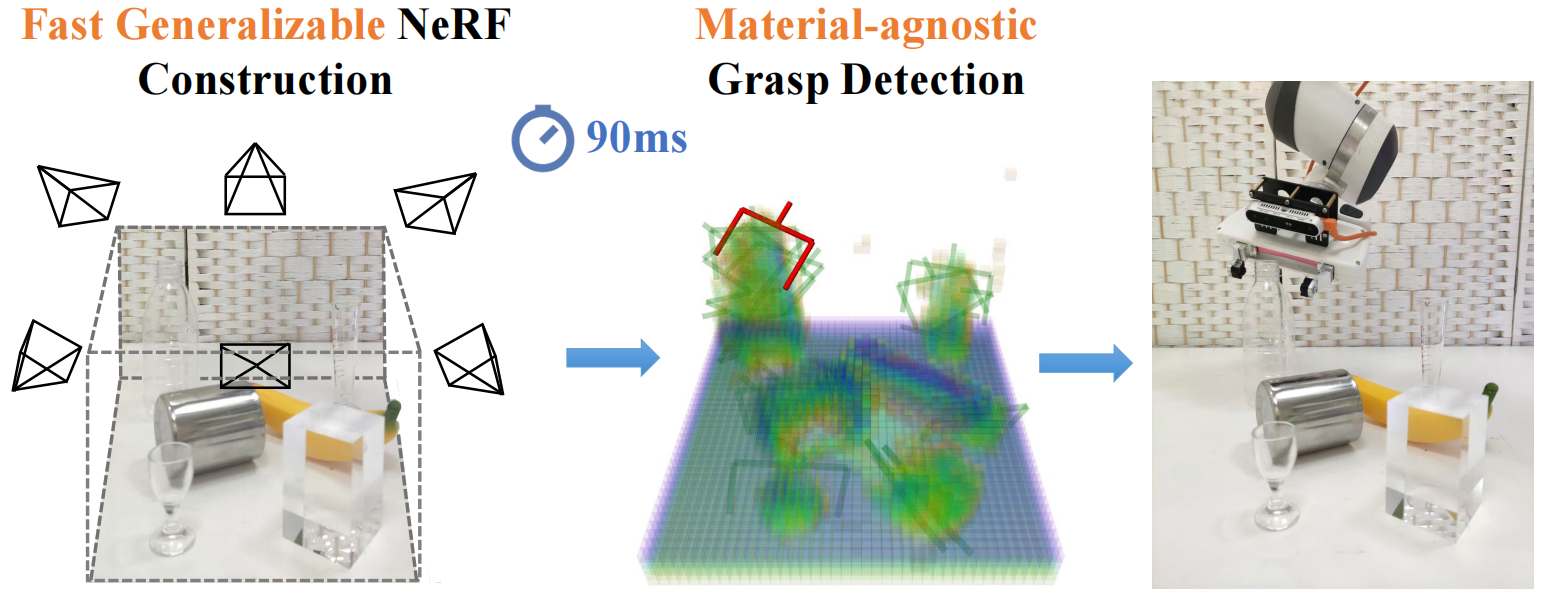
Figure 4: Generalizable grasping with sparse multi-view images using GraspNeRF highlights advanced robotic manipulation capabilities.
Navigation
NFs enhance robotic navigation by providing robust environmental models. Techniques like AutoNeRF allow autonomous agents to dynamically map and navigate environments, leveraging NFs to synthesize novel views and path planning.
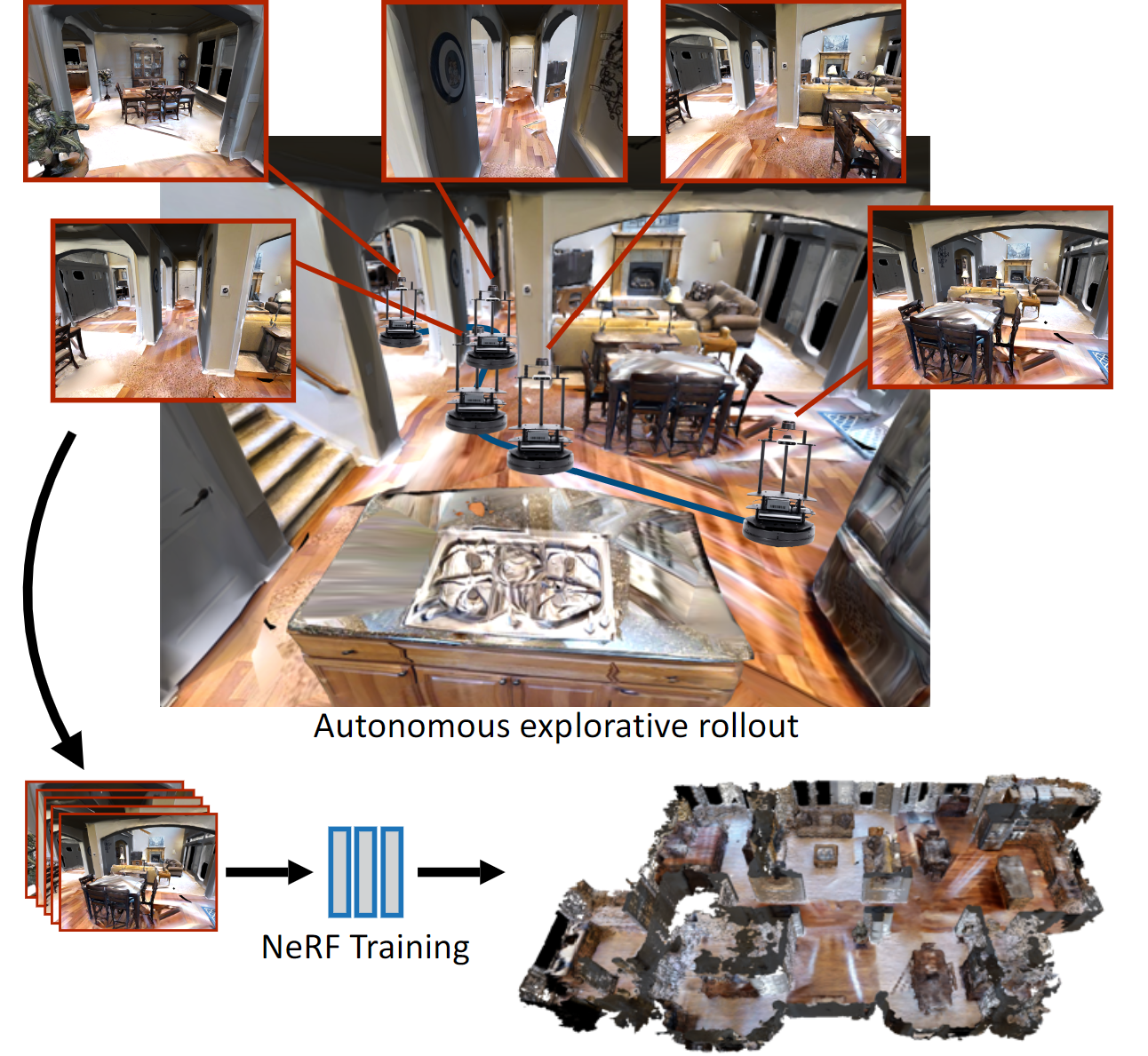
Figure 5: AutoNeRF demonstrates the training of scene representations with autonomous agents, improving navigation.
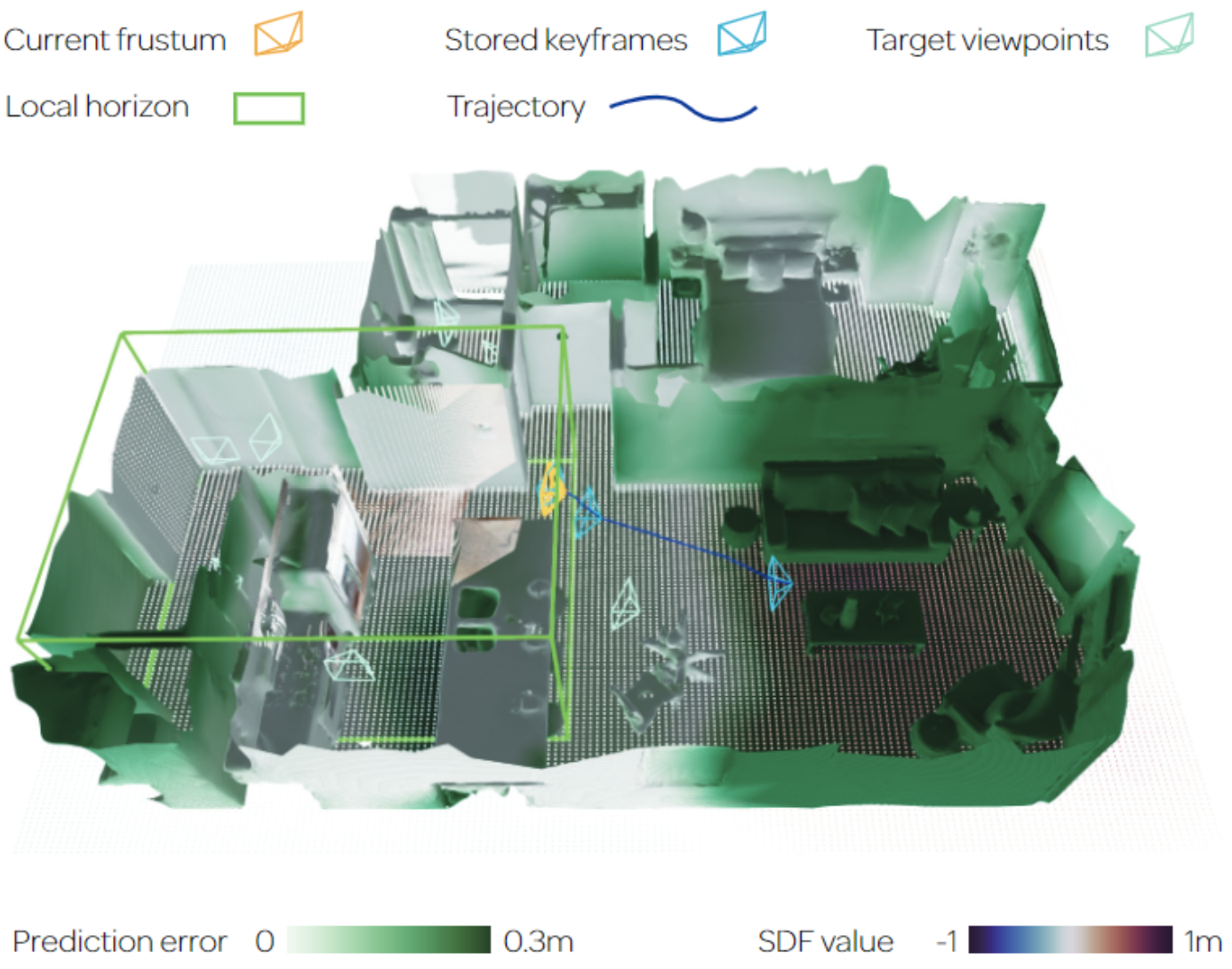
Figure 6: Active exploration of a mobile robot to minimize prediction uncertainty shows the integration of NFs with robotics for enhanced navigation.
Physics and Simulation
Incorporating physics within NFs enables realistic simulation of dynamic environments and object interactions. PAC-NeRF and PhysGaussian represent significant strides in this direction, using NFs for material simulation and dynamic scene rendering.
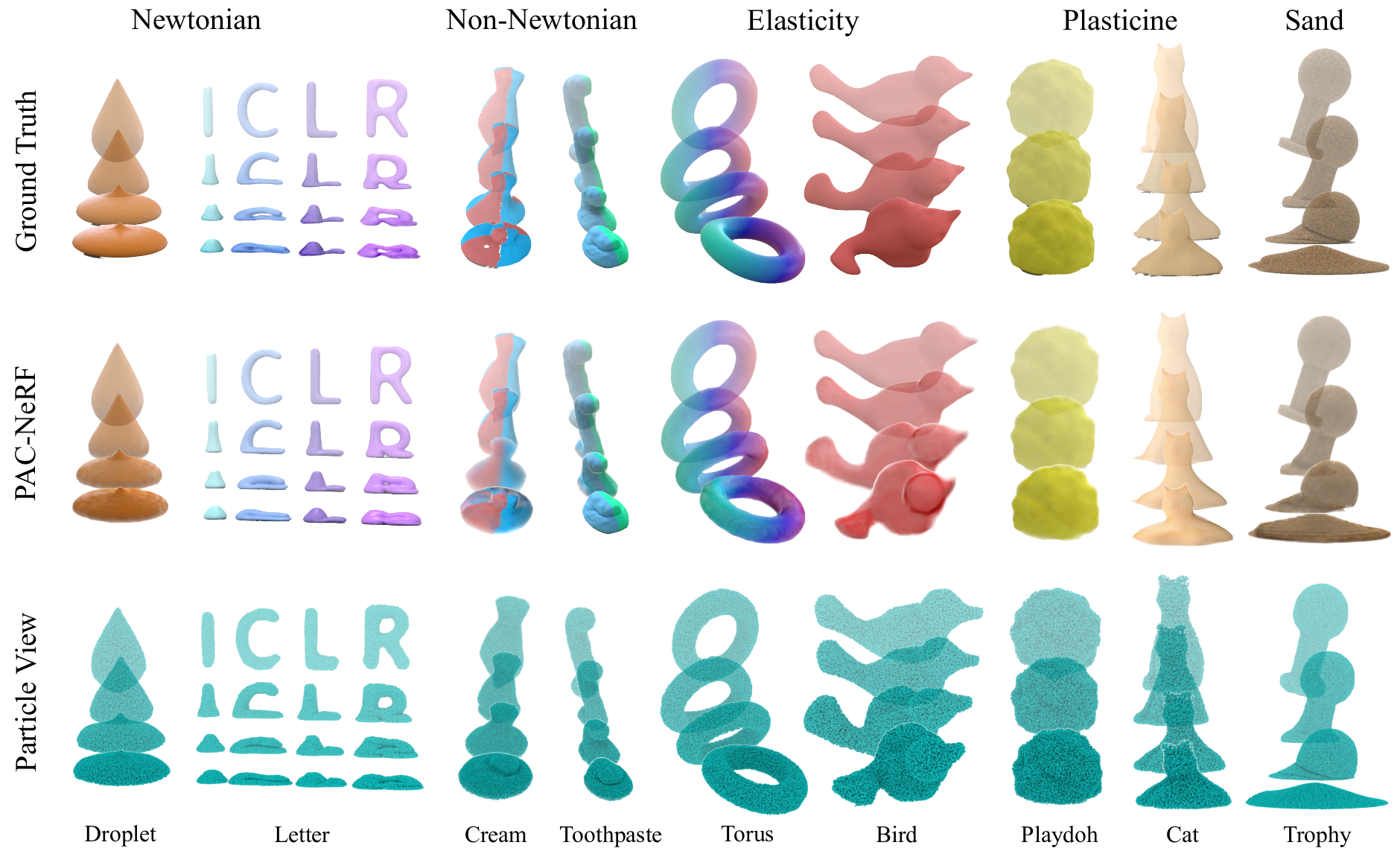
Figure 7: An overview of the different materials model-based NFs are able to simulate, highlighting their extensive capabilities.
Conclusion
The survey provides a comprehensive overview of NFs' capabilities in robotics, highlighting their profound impact across diverse applications from pose estimation to real-time navigation. The paper identifies critical challenges such as efficiency, scalability, and integration of physical properties, emphasizing the need for future research. The potential for seamless integration with generative models presents exciting opportunities for deploying NFs in real-world robotics, enhancing generalization and adaptability across tasks.