- The paper introduces LTLDoG, a novel diffusion-based framework that integrates soft and regressor guidance to satisfy LTL constraints in robot trajectory planning.
- It employs a differentiable formula evaluator and a neural network to guide trajectory adjustments, outperforming conventional diffusion methods in safety compliance.
- Experimental results in Maze2D and real-world trials confirm LTLDoG’s effectiveness in achieving high LTL satisfaction rates while ensuring goal-reaching trajectories.
LTLDoG: Satisfying Temporally-Extended Symbolic Constraints for Safe Diffusion-based Planning
The paper introduces LTLDoG, a planning framework that leverages diffusion-based models to generate robot trajectories constrained by Linear Temporal Logic (LTL) formulae. The work addresses the inherent limitation of conventional diffusion models, which often fail to adapt to novel constraints during deployment, resulting in unsafe behaviors.
Key Concepts and Methodology
Problem Statement
In complex environments, generating safe and constrained trajectories for robots is critical. The challenge lies in formulating paths that not only optimize the trajectory but also comply with temporally-extended symbolic constraints, specified through LTL. Previous methods inadequately addressed static safety constraints, lacking the flexibility to adapt to temporally extended goals.
Framework Overview
LTLDoG stands for LTL Diffusion-orienting Guidance, and utilizes a diffusion-based framework to satisfy LTL constraints. The model integrates a two-pronged strategy:
- LTLDoG-S (Soft Guidance): Utilizes a differentiable formula evaluator that outputs real-valued indications of whether a trajectory satisfies a given LTL formula, allowing for gradient-based improvements in the diffusion process (Figure 1).
- LTLDoG-R (Regressor Guidance): Uses a neural network trained to predict satisfaction values from noisy trajectories, generalizing over new LTL formulae.
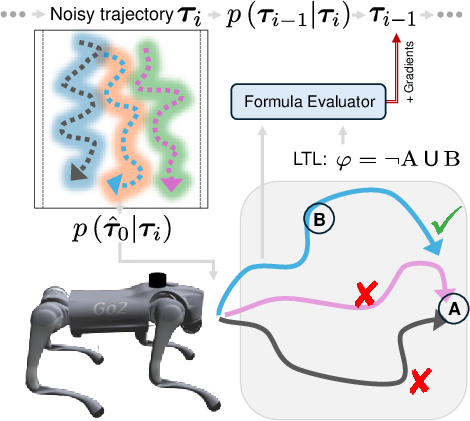
Figure 2: We present LTLDoG, a diffusion-based planning framework for generating trajectories that comply with specified LTL formulae. In the example above, a robot dog is tasked to arrive at the goal position (A), but first has to visit B and avoid obstacles (crosses).
These strategies ensure trajectories fulfill LTL constraints, enabling safe navigation in dynamic settings.
Experimental Results
Benchmarks and Comparisons
Maze2D and PushT Tasks:
- LTLDoG demonstrated superior performance in benchmark environments (Maze2d, PushT) over baseline diffusion model methods (Diffuser, Diffusion Policy) by achieving higher satisfaction rates on LTL constraints during both planning and execution phases (Tables 1-2).
Real-World Environments:
- In real-world trials involving a quadruped robot navigating a lab and an office setting, LTLDoG significantly outperformed standard diffusion approaches by maintaining high LTL satisfaction without compromising goal-reaching capabilities (Figure 3).



Figure 4: Real world environments for quadruped robot navigation.
Detailed Analysis
LTLDoG robustly handled complex symbolic constraints, such as preventive maneuvers and sequenced region visits. An adaptive trajectory length and the inclusion of symbol reasoning in the planning phase were pivotal in achieving high compliance rates with temporal constraints.
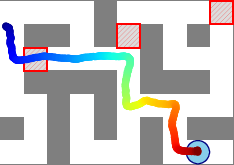
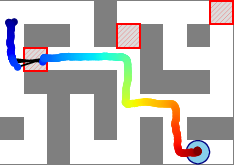
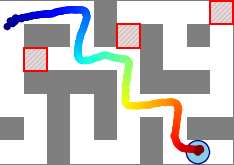
Figure 3: Examples of safe planning in Maze2d-Large. LTLDoG can detour around obstacles and satisfy LTL constraints successfully.
Despite its success, LTLDoG's effectiveness is contingent on the richness of its training dataset. Extensive path diversity is required to ensure that the model can stitch segments effectively under all potential LTL scenarios.
Conclusion
LTLDoG represents a substantial step forward in trajectory planning within diffusion models. By integrating temporal constraints through flexible LTL specifications, LTLDoG ensures safer and more reliable robot navigation, aligning closer with real-world operational demands. Future developments could focus on enhancing data efficiency and handling partial observable conditions for further robustness.