SODA10M: A Large-Scale 2D Self/Semi-Supervised Object Detection Dataset for Autonomous Driving
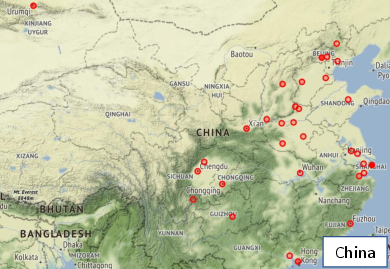
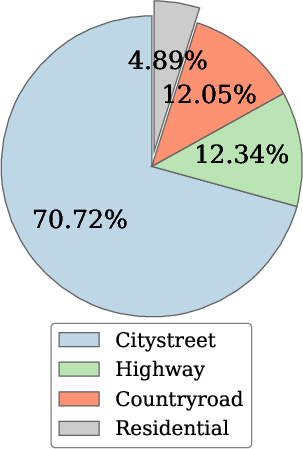
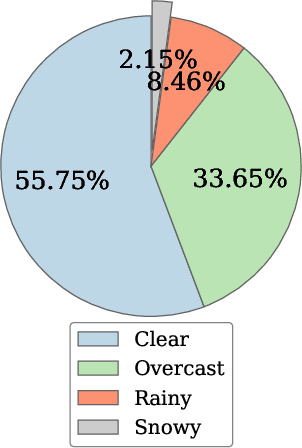
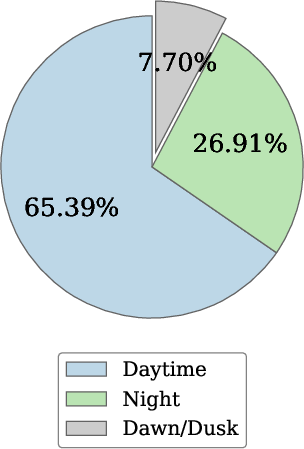
Abstract: Aiming at facilitating a real-world, ever-evolving and scalable autonomous driving system, we present a large-scale dataset for standardizing the evaluation of different self-supervised and semi-supervised approaches by learning from raw data, which is the first and largest dataset to date. Existing autonomous driving systems heavily rely on `perfect' visual perception models (i.e., detection) trained using extensive annotated data to ensure safety. However, it is unrealistic to elaborately label instances of all scenarios and circumstances (i.e., night, extreme weather, cities) when deploying a robust autonomous driving system. Motivated by recent advances of self-supervised and semi-supervised learning, a promising direction is to learn a robust detection model by collaboratively exploiting large-scale unlabeled data and few labeled data. Existing datasets either provide only a small amount of data or covers limited domains with full annotation, hindering the exploration of large-scale pre-trained models. Here, we release a Large-Scale 2D Self/semi-supervised Object Detection dataset for Autonomous driving, named as SODA10M, containing 10 million unlabeled images and 20K images labeled with 6 representative object categories. To improve diversity, the images are collected within 27833 driving hours under different weather conditions, periods and location scenes of 32 different cities. We provide extensive experiments and deep analyses of existing popular self/semi-supervised approaches, and give some interesting findings in autonomous driving scope. Experiments show that SODA10M can serve as a promising pre-training dataset for different self-supervised learning methods, which gives superior performance when fine-tuning with different downstream tasks (i.e., detection, semantic/instance segmentation) in autonomous driving domain. More information can refer to https://soda-2d.github.io.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.

