- The paper introduces a novel decoupling method that independently manages position and force, improving precision in joint robot operations.
- It employs a locally invertible mapping from joint to task space, enabling separate and effective designs for motion tracking and force regulation.
- Simulation results validate the controller's performance in contour tracking and dual-arm grasping, demonstrating its robust adaptability in complex tasks.
"A Hybrid Position/Force Controller for Joint Robots" (2010.15350)
Introduction
The paper presents a hybrid position/force controller aiming to enhance the performance of joint robots by effectively managing both motion tracking and force regulation. This dual objective is achieved through a decoupling strategy executed via a smooth and invertible mapping from joint to task space. The decoupling allows the design and implementation of independent controllers for these objectives. The approach underlines significant utility in automation tasks requiring intricate environmental interaction, such as precise manipulative and contact-intensive applications.
Hybrid Controller Design
The hybrid position/force controller is constructed by initially defining the position and force control objectives in different dimensions of the task space. Leveraging previously established theoretical frameworks, a motion controller is implemented for task-space regulation, while the force controller maneuvers the trajectory indirectly to stabilize targeted forces.
Motion Control: In adhering to the task space motion control paradigm, the paper applies a locally invertible mapping from joint to task parameters, represented by [joint angle, position]. The motion controller is structured upon standard control dynamics, ensuring responsive trajectory tracking.
Force Control: The force controller targets specific degrees of freedom tied to the end-effector, particularly decoupling positional adjustments that counter unwanted forces, as elucidated in their block and interaction models.
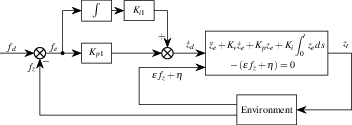
Figure 1: Control diagram for the force controller.

Figure 2: Interaction model between the end-effector and the environment.
Case Studies
Contour Tracking/Polishing Surfaces
The paper applies the hybrid controller to a contour tracking task, which simulates polishing with a required force continuity. The mapping function identifies surface irregularities, allowing simultaneous trajectory and force regulation. The simulation substantiates the controller's capability via trajectory adherence and interaction force maintenance.

Figure 3: (a) Setup for Case A. (b) Initial state. (c) Intermediate state during contour tracking.
Grabbing Boxes
In a practical implementation featuring dual robotic arms, the paper demonstrates the grasp of a box, requiring unified motion and force control to ensure secure handling and coordination between the arms. Custom mappings configure the grasp to maintain force alignment while navigating a prescribed path.
Simulation Results
The controller's efficacy is tested through simulations incorporating varying environmental parameters and force demands. Notably, the simulations confirm the controller's adeptness in modulating and stabilizing force interactions while fulfilling motion trajectories within rigid and compliant surface contexts.
Conclusion
The hybrid controller proposed in this study expands the operative range of robotic systems in environments necessitating nuanced interaction management, with significant implications for industrial applications. Future work intends to extend testing to more complex interaction models and explore potential real-world deployments. Current findings provide a promising foundation for achieving enhanced control precision in automated robotic systems.
The study’s critical contribution lies in its novel decoupling method, offering a robust framework for advancing joint robot control systems without reliance on external constraints. Further explorations could refine the interaction model assumptions and adapt the framework to real-time applications where environmental dynamics are less predictable.

