- The paper presents a comprehensive technical review of lunar reference systems, detailing both inertial (LCRS) and body-fixed (LRS) frames and highlighting meter-scale discrepancies.
- The paper introduces advanced relativistic corrections to define lunar time-scales with microsecond-level precision critical for synchronizing ground, surface, and orbital clocks.
- The paper demonstrates through simulations that integrating additional lunar laser ranging and altimetric data can reduce measurement covariance by up to 85% for key lunar parameters.
Lunar Reference Systems and Time-scales in the ESA Moonlight Program
Introduction
The accurate definition, realization, and dissemination of lunar reference frames and time scales is vital for cislunar navigation, geodesy, and scientific missions planned in the context of the ESA Moonlight program. The paper "Lunar References Systems, Frames and Time-scales in the context of the ESA Programme Moonlight" delivers an extensive review and technical assessment of the state of the art, contemporary proposals, and simulation-backed improvements for lunar reference systems. It addresses both inertial frames (LCRS) and body-fixed frames (LRS), evaluates frame accuracy, examines implications for gravity field modeling and satellite dynamics, and investigates covariance reduction with next-generation measurement infrastructure.
State-of-the-Art Lunar Reference Frame Definitions
Two primary lunar reference systems are currently in use for surface mapping and orbital dynamics: the Mean Earth/Rotation Axis (ME) frame and the Principal Axis (PA) frame. The PA frame leverages the diagonalization of the lunar inertia tensor, facilitating integration of rotational dynamics, whereas the ME frame defines the prime meridian and pole based on the mean direction to Earth. Transformations between these systems are parameterized via static Euler angles dependent on lunar ephemerides and gravity field models. Ephemerides such as JPL's DE series and IMCCE/OCA's INPOP deliver these parameters at sub-meter accuracy, but systematic offsets exist between frame realizations, typically on the order of 860 meters for lunar surface points.
The Moon-centered inertial frame required for spacecraft orbit determination is commonly adapted from the IAU Geocentric Celestial Reference System (GCRS) to selenocentric coordinates, as detailed in proposals for the GRAIL mission and subsequent literature. These are formalized in the Lunar Celestial Reference System (LCRS), equipped with relativistic metric tensor formalism and associated lunar time scales.
Relativistic Reference Systems and Lunar Time-scales
The LCRS is rigorously defined on the basis of IAU 2000 Resolution B1.3 and the Damour-Soffel-Xu metric, yielding a selenocentric, kinematically non-rotating celestial system. The transformation from Solar System barycentric (BCRS) to LCRS coordinates involves corrections up to post-Newtonian order for position, velocity, and time. Key attention is paid to the lunar coordinate time scale TCL, which is derived analogously to TCG for Earth, with explicit expressions for its relation to TCB and TCG, and corrections up to c−4 providing microsecond level precision per day.
Time synchronization for lunar navigation is further detailed for ground, surface, and orbital clocks. The secular drift and periodic terms of TCL-TT, reaching 58.7 microseconds per day and 0.6 microseconds amplitude respectively, are demonstrated in the results.
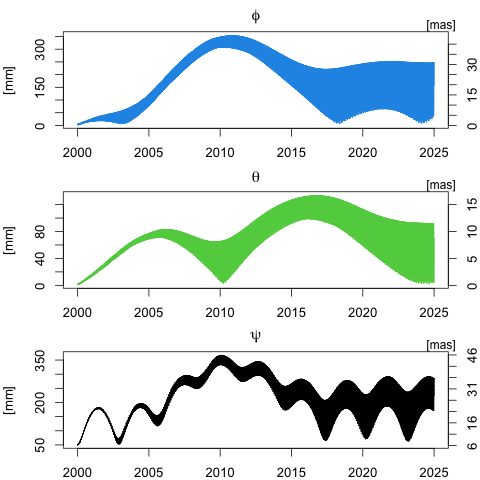
Figure 1: Propagation of the INPOP21a covariance matrix for the three libration angles (ψ, θ, φ), showing temporal evolution and stability.
Frame Realization and Numerical Accuracy
Frame realization is contingent on the underlying planetary and lunar ephemeris. Comparison of DE421 and INPOP19a solutions reveals meter-level discrepancies in selenocentric positions, primarily in the Z-component, with gravitational mass discrepancies at 1.2×10−8 relative difference. Rotational Euler angle variations between PA realizations are quantified, remaining within 30–50 cm over 5 years for state-of-the-art models and up to meters for older or less physically detailed solutions. Covariance propagation (see Figure 1) confirms stability at this level for the libration angles, essential for precision orbit determination and lunar geodesy.
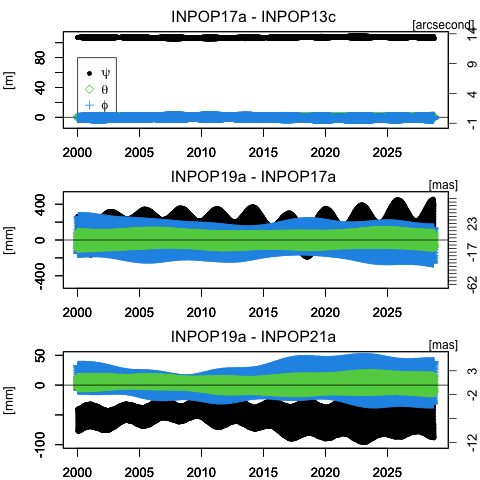
Figure 2: Comparisons between the three libration angles of the Moon with different ephemerides, plotted as surface displacement and arcsecond differences.
Impact on Gravity Field and Satellite Orbit Computation
Reference frame inconsistencies translate directly to gravity field coefficient transformations and orbital computations. Transformation of the GRAIL GL0420A gravity field from DE421 PA to INPOP19a PA entails rotation, translation, and scaling. While rotational differences impart millimeter-scale biases, scale and origin offsets result in meter-level discrepancies in satellite orbital elements and reconstructed paths. Orbit integration in mismatched frames yields errors exceeding 20–45 meters after one day.
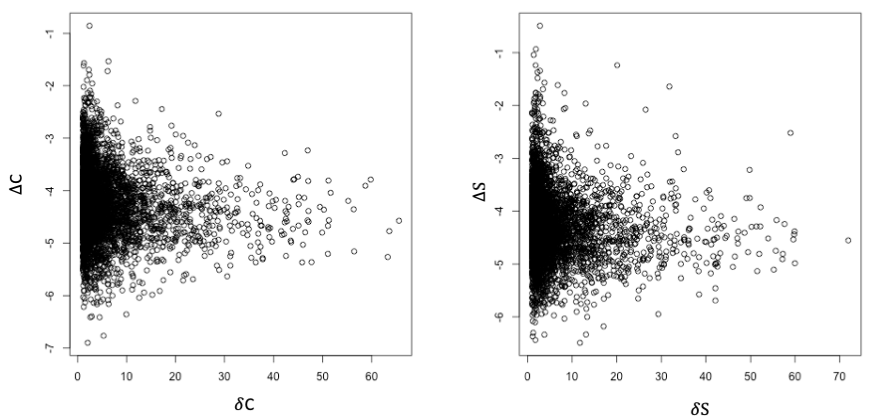
Figure 3: Differences between DE421 PA and INPOP19a PA C/S coefficients over 5 years, illustrating the effect of frame conversion on lunar gravity field representation.
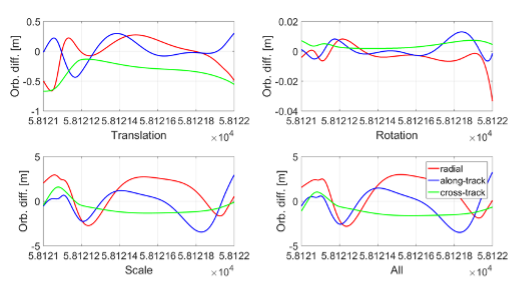
Figure 4: Differences in reconstructed lunar orbiter orbits due to translation, rotation, and scaling between DE421 and INPOP19a reference frames.
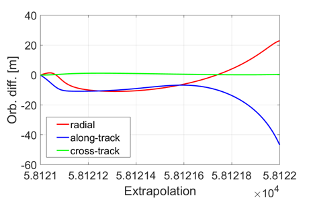
Figure 5: Differences in extrapolated orbit trajectories when initial state vectors are transformed between the DE421 and INPOP19a frames.
Lunar Laser Ranging Control Network and DTM Linkage
Lunar Laser Ranging Retroreflectors (LLRRs) constitute the primary high-accuracy control points for lunar frame realization, with formal uncertainties at the 1–3 cm level for INPOP-based solutions and up to 40 cm for the DE series. Inter-ephemeris comparison yields external frame accuracy at the 1–2 meter level. Integration with LRO DTM and imaging provides cross-validation, albeit currently the DTM tie accuracy is limited by LRO orbit determination overlap at ∼10 meters.
Simulation-Based Future Improvements
Simulation studies were performed to quantify covariance matrix reduction with two scenarios: i) deployment of additional LLRRs on the lunar poles; ii) MoonLight orbiter altimetric campaigns with high-precision laser ranging to pole reflectors. Covariance analyses show that adding polar reflectors with improved observational precision can yield ∼70–85\% uncertainty reduction for tidal Love numbers, GM_EMB, and positional vectors, depending on range uncertainty assumptions.
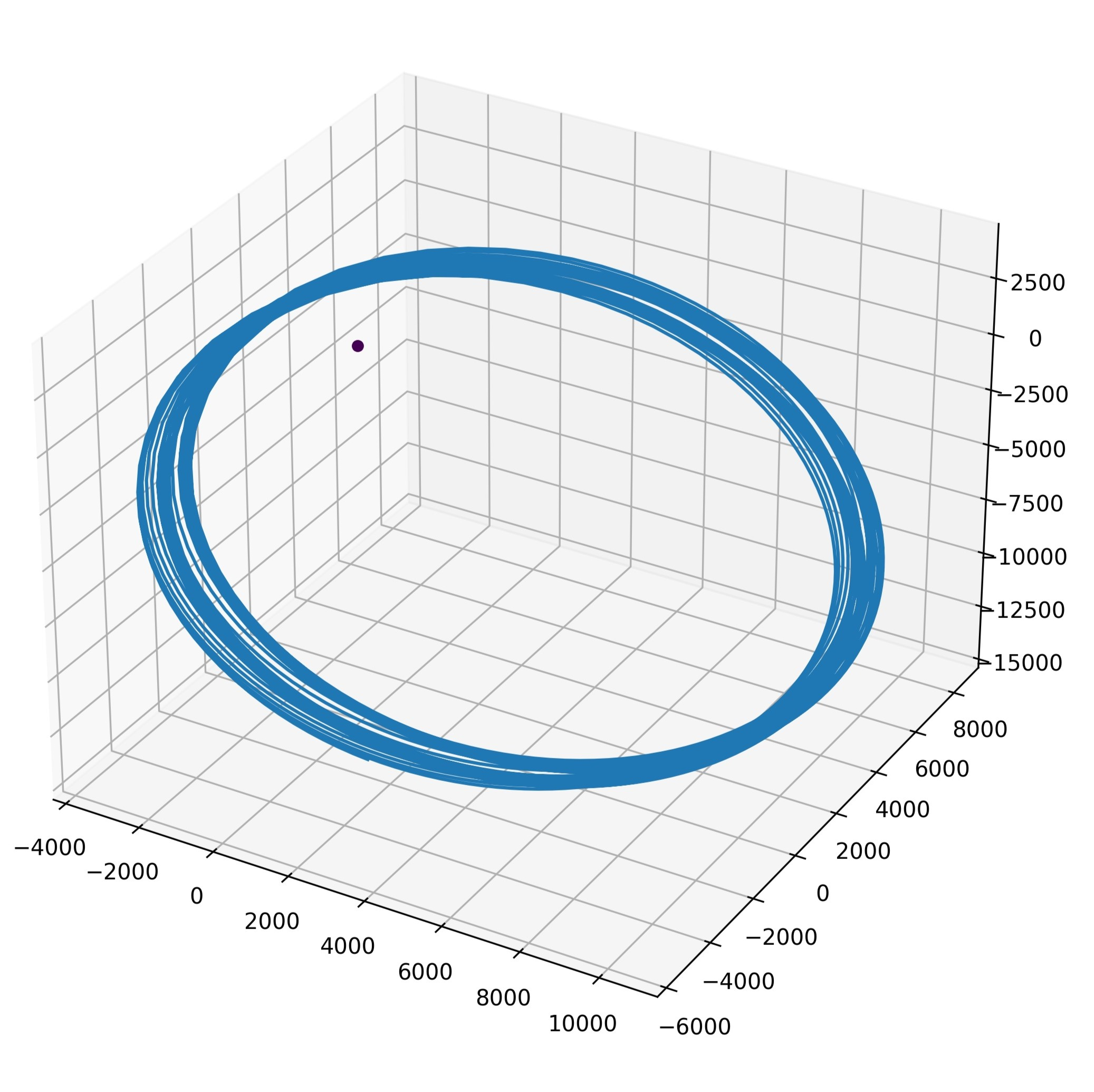
Figure 6: Spacecraft trajectory relative to Moon center during June 2026, highlighting proximity to North Pole LLRR and potential for high accuracy laser ranging.
MoonLight altimetry simulations indicate that degree 3, order 2 gravity field coefficients and specific libration angles benefit significantly from 1-cm accuracy ranging to pole LLRRs. The impact magnitude depends on both ranging precision and the existing uncertainty floor in LLRR measurements.
Practical and Theoretical Implications
Advancements in lunar reference frame realization, time scale dissemination, and integrated ephemeris models are pivotal for lunar navigation, landing operations, science-grade cartography, and fundamental physics tests. The microsecond-level accuracy in time scales and centimeter-level frame control are enabling technologies for real-time radio navigation, planetary geodesy, and high-precision scientific payloads. As lunar infrastructure expands, rigorous reference system standardization will be essential to mitigate multi-meter biases in orbit integration and surface localization.
Continued deployment of LLRRs, integration of altimetric data, enhanced physical modeling (core-mantle interaction, viscoelastic crust, tide effects), and further accumulation of laser ranging observations are expected to reduce frame and time-scale uncertainties, with profound implications for future mission planning, lunar resource utilization, and space-time navigation.
Conclusion
The paper provides a comprehensive technical account of lunar reference frame and time-scale definitions, their numerical realization, and prospects for improvement in the context of the ESA Moonlight program. Key findings include the quantification of meter-scale discrepancies arising from inter-ephemeris transformations, formalization of lunar time scales at microsecond accuracy, and simulation-backed reductions in frame covariance with advanced reflector and altimetry infrastructure. These developments underpin robust lunar navigation, high-precision orbit determination, and the integration of planetary scale scientific datasets. Standardized, interoperable frame and time-scale models will be critical for the coordination of future lunar missions, cislunar navigation networks, and advanced lunar geodetic science.

