- The paper introduces a QP-based RS framework integrating ante-impact, interim, and post-impact control modes to avoid input peaks and error peaking.
- It employs a teleoperation-generated reference with position feedback to manage transitions during uncertain simultaneous impacts.
- Experimental validation on dual 7DOF Franka Emika robots shows reduced force peaks and enhanced manipulation success under environmental disturbances.
Reference Spreading Control for Dual-Arm Robotic Manipulation with Simultaneous Impacts
This essay discusses a control framework for dual-arm robotic manipulation with planned simultaneous impacts, addressing challenges in tracking control when dealing with nominally simultaneous impacts. The framework extends reference spreading control, constructing a reference from a teleoperation-based approach and incorporating a novel interim mode to handle environmental uncertainties that lead to a series of unplanned single impacts. Experimental validation on a dual-arm robotic setup demonstrates the framework's robustness against environmental uncertainty compared to baseline control approaches.
The paper addresses three key challenges in impact-aware manipulation: hardware limit violation, impact-consistent reference generation, and error peaking. Traditional tracking control induces error peaking due to mismatches between actual and nominal impact times, leading to undesirable torque peaks. The reference spreading (RS) framework, extended in this work, mitigates error peaking by employing overlapping ante- and post-impact references.
Related work on impact-aware tracking control includes methods that redefine the tracking error, project control objectives onto impact-invariant subspaces, and introduce transition phases or heuristic gain blending. The paper extends the RS framework by defining a novel interim mode that uses position feedback during partial contact establishment to avoid input peaks and steps. The control approach is cast into the quadratic programming (QP) robot control framework, enabling the control of robots with multiple tasks and constraints.
QP-based Reference Spreading Control Approach
The paper introduces a QP-based control approach that integrates the RS framework with ante-impact, interim, and post-impact control modes. The interim mode addresses uncertainties causing a loss of impact simultaneity, using a blending parameter γ to ensure smooth transitions between modes. The interim mode desired wrench iint is formulated as:
$\begin{aligned}
^\text{int}_{i} := & \ (1-\gamma)\bar{}^a_{i,r}(t) + \gamma\bar{}^p_{i,r}(t) \ + & \ \bm D^\text{int}_{i} \left( (1-\gamma)_i + \gamma \bar{}^p_{i,r}(t) - _i \right) \ + & \ \bm K^\text{int} \begin{bmatrix} (1-\gamma)\bar{\bm p}^a_{i,r}(t) + \gamma\bar{\bm p}^p_{i,r}(t) - {\bm p_{i} \ -(\log(\bm R_i^T \bm R^\text{int}_{i,d}))^{\vee } \end{bmatrix}
\end{aligned}$
where γ is defined as $\gamma := \frac{t-T_\text{imp}{\Delta t_\text{int}}$.
This design ensures continuous transitions and reduces velocity feedback during uncertain contact states. The ante-impact mode establishes near-simultaneous contact, while the post-impact mode maintains desired force through a feedforward signal. The teleoperation procedure is depicted below.

Figure 1: Depiction of the teleoperation procedure, where a user uses the VIVE handheld controller devices to prescribe a reference for both end effectors.
The robot control scheme based on QP robot control employed for recording a reference through teleoperation is shown below.
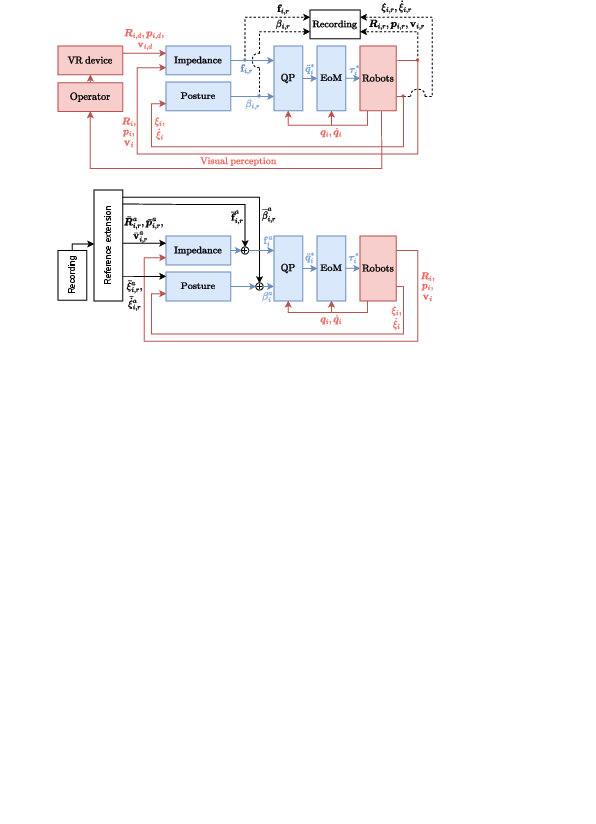
Figure 2: Visualization of the robot control scheme based on QP robot control employed for recording a reference through teleoperation. All physical entities are red, the controller-related signals are blue, and the recorded signals are black.
Experimental Validation
Experimental validation involves a dual-arm grabbing task using two 7DOF Franka Emika robots, comparing the proposed approach against three baselines: no RS, no velocity feedback, and no interim mode. To emulate environmental uncertainty, the manipulated object's position is shifted. The proposed approach demonstrates reduced input peaks and steps, while snapshots of the ante-impact state are shown.



Figure 3: Ante-impact state
The visualization of the ante-impact QP control scheme employed for tracking the recorded reference using the proposed RS-based control framework is displayed below.
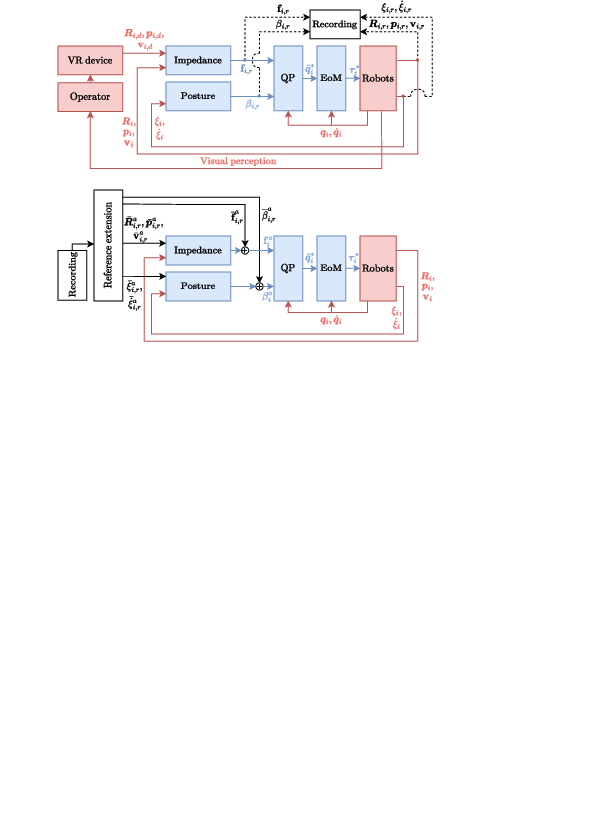
Figure 4: Visualization of the ante-impact QP control scheme employed for tracking the recorded reference using the proposed RS-based control framework. The physical robot signals are red, the controller-related signals are blue, and extended reference signals are black.
An additional ante-impact state is displayed.



Figure 5: Ante-impact state
A photo of the rice box used is displayed.




Figure 6: Rice box (1.25 kg)
Results show that the proposed approach achieves higher success rates and reduces force peaks compared to baseline approaches. The approach's robustness in reducing input peaks and jumps under environmental uncertainty is highlighted.
Conclusion
The paper presents a reference spreading-based QP robot control framework for motions with nominally simultaneous impacts, validated through dual-arm robotic grabbing experiments. The novel interim mode controller avoids input peaks and jumps during transitions without needing a contact-completion detection mechanism. Future extensions include incorporating a contact-completion detector, impact-aware motion planner, and formal stability proof.