- The paper demonstrates that ID-WBC requires significantly higher gains compared to PB-WBC for low-inertia tasks, emphasizing inertia-dependent scaling.
- The study uses the Kangaroo humanoid robot to experimentally validate performance in foot control, squatting, and jumping under disturbances.
- The analysis highlights that PB-WBC offers more uniform, intuitive gain tuning for explicit force control, despite sensitivity to sensor imperfections.
Experimental Comparison of Whole-Body Control Formulations for Humanoid Robots in Task Acceleration and Task Force Spaces
Introduction
This paper presents a rigorous experimental and analytical comparison of two prominent whole-body control (WBC) paradigms for humanoid robots: Inverse Dynamics Whole-Body Control (ID-WBC) and Passivity-Based Whole-Body Control (PB-WBC). The study is motivated by the need to understand the practical implications of formulating WBC in either task acceleration or task force space, particularly under non-ideal real-world conditions such as joint friction, sensor noise, unmodeled disturbances, and imperfect contacts. The experimental evaluation is conducted on the Kangaroo humanoid platform, encompassing a diverse set of tasks: swing foot position/orientation control, squatting (with and without unmodeled weights), and jumping. The results are interpreted in light of the underlying control-theoretic formulations, with a focus on disturbance rejection, gain tuning, and robustness to hybrid dynamics.

Figure 1: Snapshots of experiments covered in this paper: jumping (top), disturbed and undisturbed squatting (bottom left), and foot position and orientation control (bottom right).
Inverse Dynamics Whole-Body Control (ID-WBC)
ID-WBC operates in the task acceleration space, leveraging the system's full rigid-body dynamics to compute joint torques that achieve desired task accelerations. The control law is derived from the floating-base dynamics, with task errors regulated via PD control in acceleration space. The resulting QP formulation allows for soft or strict task prioritization and incorporates physical constraints such as friction cones and actuator limits. A key property is that both control actions and disturbance effects are scaled by the task-space inertia, leading to non-uniform behavior across tasks with different inertias.
Passivity-Based Whole-Body Control (PB-WBC)
PB-WBC is formulated in the task force space, with a focus on ensuring passivity and stability via impedance control. The generalized velocities are mapped through an invertible Jacobian, and the control law directly regulates task-space forces and wrenches. The QP formulation decouples the computation of ground reaction forces from joint torques, and the closed-loop dynamics retain the Coriolis terms. Unlike ID-WBC, the disturbance rejection and control action scaling are uniform across tasks, independent of their inertia.
Analytical Disturbance and Gain Scaling
The paper provides a detailed analysis of how disturbances and control gains manifest in each formulation. In ID-WBC, the steady-state error under constant disturbance is inversely proportional to the task inertia and proportional gain, i.e., ess∼τdist/(mkp). In PB-WBC, the error is independent of inertia, ess∼τdist/kp. This leads to the requirement for significantly higher gains in low-inertia tasks for ID-WBC, while PB-WBC allows for more uniform gain selection.
Experimental Evaluation
The first experiment evaluates both controllers on a low-inertia task: swinging the robot's feet while suspended. The Kangaroo robot's ankle joints exhibit significant friction and modeling errors due to their mechanical design. Both controllers achieve comparable tracking performance, but ID-WBC requires control gains two orders of magnitude higher than PB-WBC for orientation control. PB-WBC tuning is more intuitive, with gains in the hundreds versus tens of thousands for ID-WBC.

Figure 2: Snapshots of Kangaroo following the desired foot position and orientation trajectories while hanging from a crane.
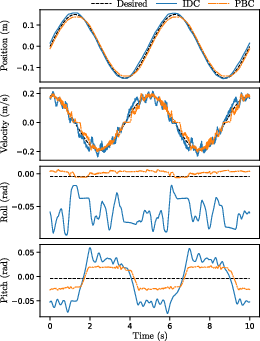
Figure 3: The response of ID-WBC and PB-WBC to the foot position and orientation control tasks. The feet are commanded to move back and forward at a constant height and orientation w.r.t. the inertial frame. The desired trajectory is a peak-to-peak 30cm sinusoidal signal with 0.2 Hz frequency.
Squatting: High-Inertia Task
Squatting involves high-inertia tasks (CoM and torso orientation). Both controllers are tuned for minimal steady-state error. By scaling PB-WBC gains to match the mass-scaled ID-WBC gains, both achieve similar performance, with steady-state errors corresponding to approximately 100 N of unmodeled disturbance. The velocity and orientation tracking are nearly identical.

Figure 4: Snapshots of Kangaroo doing 20cm squats.
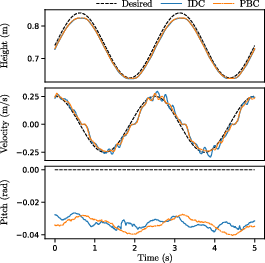
Figure 5: The response of ID-WBC and PB-WBC to squatting. The desired trajectory is a peak-to-peak 20cm sinusoidal signal with 0.4 Hz frequency.
Squatting with Unmodeled Weight
Adding 5 kg of unmodeled mass increases the steady-state error in both controllers, as predicted by the analytical disturbance scaling. The error increment matches the additional weight, confirming the theoretical predictions.
Figure 6: Snapshots of Kangaroo doing 20cm squats with 5kg of weights.
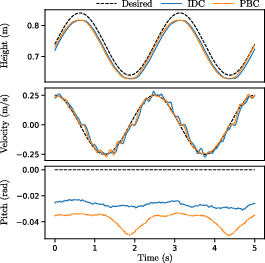
Figure 7: The response of ID-WBC and PB-WBC to squatting with an additional 5kg of unmodeled mass. The desired trajectory is a peak-to-peak 20cm sinusoidal signal with 0.4Hz frequency.
Jumping: Hybrid Dynamics and Impact Robustness
Jumping introduces hybrid dynamics and contact transitions. Both controllers are evaluated on small and larger jumps. PB-WBC requires additional damping at touchdown to mitigate torque discontinuities and compensate for violations of the rigid contact assumption. Both controllers achieve similar jump heights, with minor differences in overshoot/undershoot and velocity profiles. Notably, PB-WBC is more sensitive to leg force sensor non-uniformities, requiring more careful tuning of damping terms.
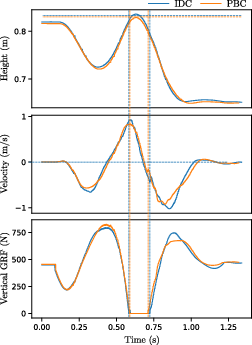
Figure 8: The response of ID-WBC and PB-WBC to 1.3 cm jump. The GRF represents the ground reaction force estimated by the whole-body controller. The vertical dashed lines represent the liftoff and touchdown moments. Horizontal lines represent the desired jumping height.
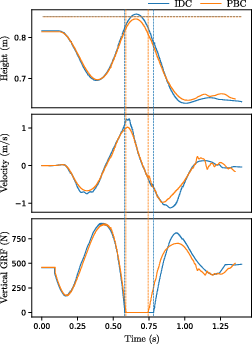
Figure 9: The response of ID-WBC and PB-WBC to 3 cm jump.
Discussion
Tuning and Practical Implementation
ID-WBC's inertia-dependent scaling of control actions and disturbances necessitates task-specific gain tuning, with low-inertia tasks requiring disproportionately high gains. This complicates controller tuning and can lead to marginal stability in the presence of modeling errors or backlash. PB-WBC, by contrast, offers more uniform and intuitive gain selection, especially advantageous for tasks with widely varying inertias. For interaction tasks requiring explicit force or impedance control, PB-WBC's formulation is more natural.
ID-WBC is modular and does not require the task Jacobian to be invertible, making it applicable to under-, well-, or over-determined task sets. PB-WBC, however, requires an invertible Jacobian and is less straightforward to apply in over-determined scenarios. This restricts its generality but can be mitigated in well-structured tasks.
Robustness to Impacts and Hybrid Dynamics
Both controllers can be tuned to achieve similar performance in hybrid tasks such as jumping. However, PB-WBC is more sensitive to violations of the rigid contact assumption and sensor non-uniformities, necessitating additional damping and careful handling of contact transitions. ID-WBC's disturbance scaling by inverse inertia can provide some robustness in high-inertia tasks, reducing the impact of certain disturbances.
Conclusion
This study provides a comprehensive experimental and analytical comparison of ID-WBC and PB-WBC for humanoid whole-body control. The results demonstrate that while both controllers can achieve comparable performance when carefully tuned, their practical implementation characteristics differ significantly. ID-WBC offers greater generality and modularity but requires complex, inertia-dependent gain tuning. PB-WBC enables more uniform and intuitive tuning, particularly for low-inertia or interaction tasks, but is less flexible in over-determined scenarios and more sensitive to contact and sensor imperfections. Future work may focus on hybrid formulations that combine the advantages of both approaches, as well as adaptive gain tuning and robustification strategies for improved real-world deployment of humanoid WBC systems.