- The paper introduces a graph-based scene representation integrating edge features with RGCN layers to enhance vehicle trajectory optimization at intersections.
- It employs a simulation environment with updated highway models to realistically benchmark its RL planner against traditional traffic controls.
- Results show improved throughput and reduced stop rates below 20%, demonstrating scalability and adaptability across varying traffic densities.
An Enhanced Graph Representation for Machine Learning Based Automatic Intersection Management
Introduction
The paper presents improvements in automatic intersection management (AIM) using reinforcement learning (RL) and graph neural networks (GNNs), focusing on traffic efficiency at urban intersections. Building on prior research applying reservation and optimization-based algorithms, the authors implement a graph-based scene representation leveraging edge features to enhance model accuracy. This approach addresses the complexity of controlling multiple vehicles at intersections, integrating edge computing resources and vehicle communication.
Graph-Based Representation and Network Architecture
The cornerstone of this paper is the enhancement of the graph-based scene representation. Previous models utilized only node features for vehicles, but this work introduces edge features such as inter-vehicle distances and relative bearings. This augmented representation enhances scene encoding and supports more complex network interactions.
The network architecture leverages Relational Graph Convolution (RGCN) layers to process these edge features alongside vertex features, facilitating sophisticated message passing between nodes. This crucial update allows for more refined decision-making, enabling the model to optimize vehicle trajectories efficiently.
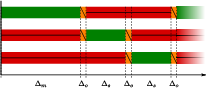
Figure 1: Traffic light pattern for the large intersection. Group 1 controls the main road outer lanes. Group 2 corresponds to the main road left-turn lanes and Group 3 to the side road.
Simulation Environment
The simulation environment utilizes the Highway-env simulator, updated to include a centralized planning framework and EIDM-based car following (CF) models. This configuration simulates real-world driving by incorporating lateral lane constraints and longitudinal control, reflecting dynamic traffic conditions and intersection layouts.
The traffic light controller, as depicted in Figure 1, organizes vehicles into groups based on lane priority, which corresponds to different traffic phase timings. This reflects practical implementations in urban settings, aiming to benchmark the learning-based approach against realistic scenarios.
Evaluation and Results
The evaluation demonstrates significant improvements in throughput and reduced duration for intersection crossing when using the enhanced RL planner. Shown in Figure 1, the model outperforms traditional traffic lights and FIFO schemes across varying traffic densities. The eRL planner reduces stop rates to below 20%, indicating efficient traffic management and smooth transitions.
The generalization capability is a pivotal advantage, allowing the model to handle unseen and larger intersections with minimal loss of performance. This adaptability is crucial for practical deployment in diverse urban environments.
Conclusion
This paper advances AIM by integrating enhanced graph representations with machine learning for robust, scalable intersection management. By demonstrating superior performance over traditional traffic lights and FIFO policies, the enhanced RL planner sets a benchmark for future developments in cooperative intersection control. Further exploration into mixed traffic scenarios and real-world integration remains a promising avenue for research.

