- The paper presents a hybrid method that integrates sampling-based path planning with optimization-based trajectory refinement to navigate cluttered environments efficiently.
- It combines RRT-inspired sampling with quadratic programming to generate obstacle-free, time-parameterized trajectories that respect robot dynamical constraints.
- Extensive simulations and real-world experiments demonstrate computation times under 300 ms and high success rates even in dense, dynamic settings.
Overview of the Hybrid Method for Online Trajectory Planning
The paper "A Hybrid Method for Online Trajectory Planning of Mobile Robots in Cluttered Environments" (1908.08493) presents an innovative approach to trajectory planning for mobile robots navigating through cluttered environments. The method leverages a combination of sampling-based techniques and model-based optimization to efficiently plan trajectories that respect both environmental constraints and robot dynamical constraints.
Methodological Framework
The proposed hybrid method integrates two key approaches: sampling-based path generation and optimization-based trajectory refinement. Initially, a sampling-based planner, such as Rapidly-Exploring Random Trees (RRT) or Batch Informed Trees (BIT*), is employed to generate an obstacle-free path. This path serves as the foundation upon which further trajectory optimization is performed.
Sampling-Based Path Planning
Sampling-based methods are chosen due to their effectiveness in generating traversable paths without discretizing the configuration space. Among these, algorithms like IRRT* facilitate incremental rewiring to optimize path cost iteratively, ensuring an obstacle-free solution (Figure 1).
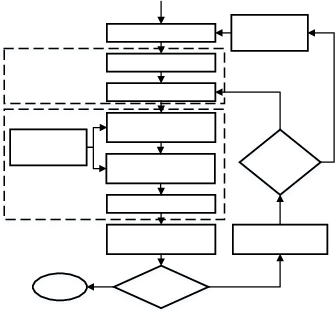
Figure 1: Sketch of the proposed hybrid method for trajectory generation.
Optimization-Based Trajectory Planning
Upon establishing a feasible path, a quadratic programming approach refines the path to incorporate dynamical constraints specific to the robot. The optimization problem is formulated over the obstacle-free path, aiming to generate a time-parameterized trajectory that adheres to velocity and acceleration limits. The formulation guarantees feasibility without requiring iterative solutions (Figure 2).



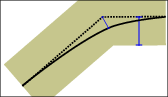
Figure 2: Illustration of the proposed hybrid method for trajectory planning.
The efficacy of this hybrid trajectory planning method is demonstrated through extensive simulations and real-world experiments. In simulated forest environments with varying tree densities, the method exhibits superior computation time and success rates compared to existing techniques like CHOMP and iSCP (Figure 3).
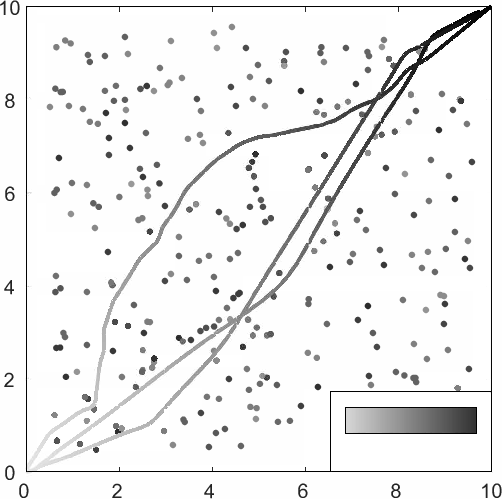
Figure 3: Algorithm comparison among iSCP, CHOMP and the proposed approach on different forest environments varying on tree density.
In practical scenarios, such as navigating a maze or traversing densely packed obstacle fields, the algorithm consistently produces quick computations—on average, under 300 ms for environments with up to 200 obstacles—while maintaining high success rates.
Implications and Future Prospects
The hybrid trajectory planning approach significantly enhances the capability of autonomous systems to operate in cluttered environments, which is crucial for applications like search and rescue missions or complex industrial tasks. The method's ability to plan and replan trajectories in real-time opens new possibilities in dynamic environments where conditions rapidly change.
Future developments aim to extend this framework to multi-agent systems, allowing coordinated trajectory planning for fleets of robots. Additionally, adapting the method to handle dynamic obstacles or integrating adaptive control systems will further broaden its applicability to more challenging environments.
Conclusion
The paper presents a robust solution to a critical problem in robotic navigation: efficiently planning feasible trajectories in cluttered environments. By combining sampling-based path generation with model-based convex optimization, the method achieves remarkable performance in terms of computation speed and reliability, paving the way for more autonomous operations in complex scenarios. The promising results suggest a strong potential for future research and development in multi-agent systems and dynamic trajectory planning.

