- The paper introduces AutoRVO, an algorithm that computes smooth, collision-free trajectories using dynamic constraints and the CTMAT representation.
- It leverages reciprocal velocity obstacles and local optimization to closely mimic real-world movements in dense heterogeneous traffic.
- Validated with drone-captured urban traffic data, AutoRVO outperforms traditional models in simulation accuracy and realism.
Overview of AutoRVO: Local Navigation in Dense Traffic
The paper "AutoRVO: Local Navigation with Dynamic Constraints in Dense Heterogeneous Traffic" (1804.02915) introduces the AutoRVO algorithm, designed to simulate collision-free navigation of various road agents—cars, tricycles, bicycles, and pedestrians—in densely populated traffic scenarios. This algorithm innovatively computes smooth trajectories while incorporating dynamic constraints, utilizing a novel medial-axis-based shape representation, CTMAT, for efficient multi-agent simulation.
Methodology and Algorithm Design
AutoRVO builds upon existing methods for reciprocal collision avoidance, notably extending the concept for heterogeneous traffic environments requiring advanced kinematic modeling. The CTMAT representation provides a refined geometric framework compared to traditional disk-based models, crucial for accurately modeling varied agent dynamics in close proximity (Figure 1).
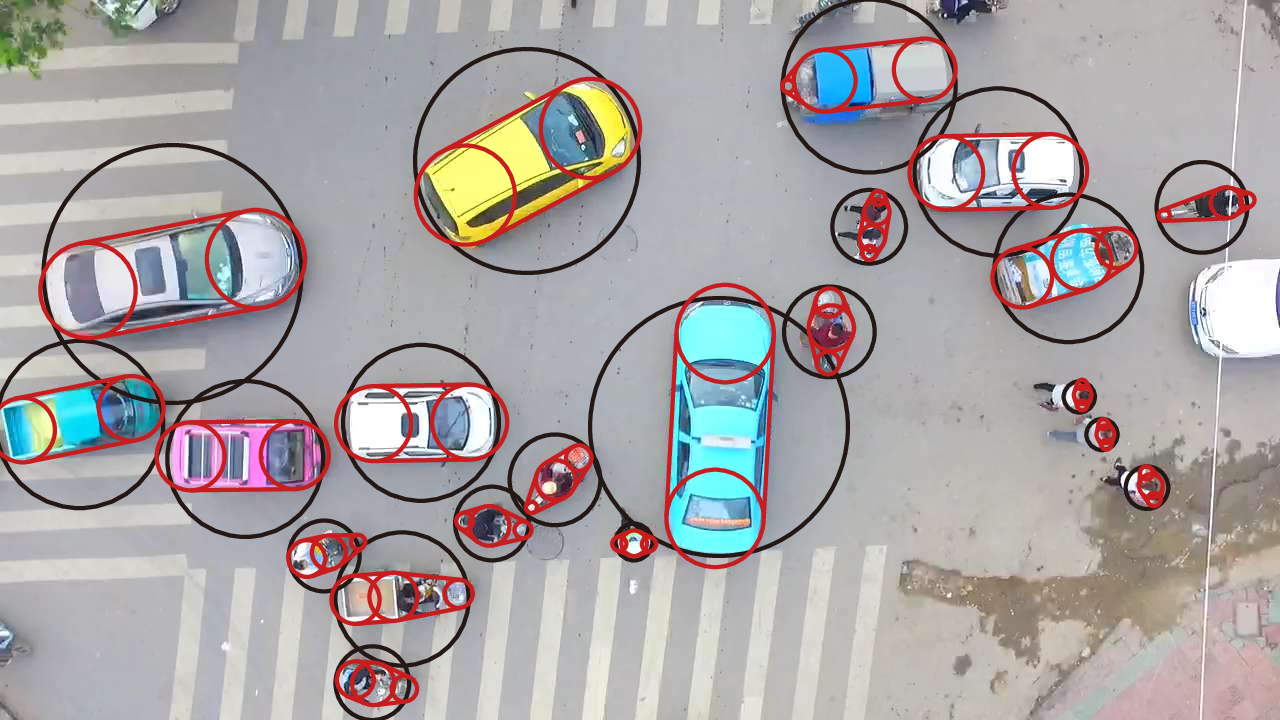
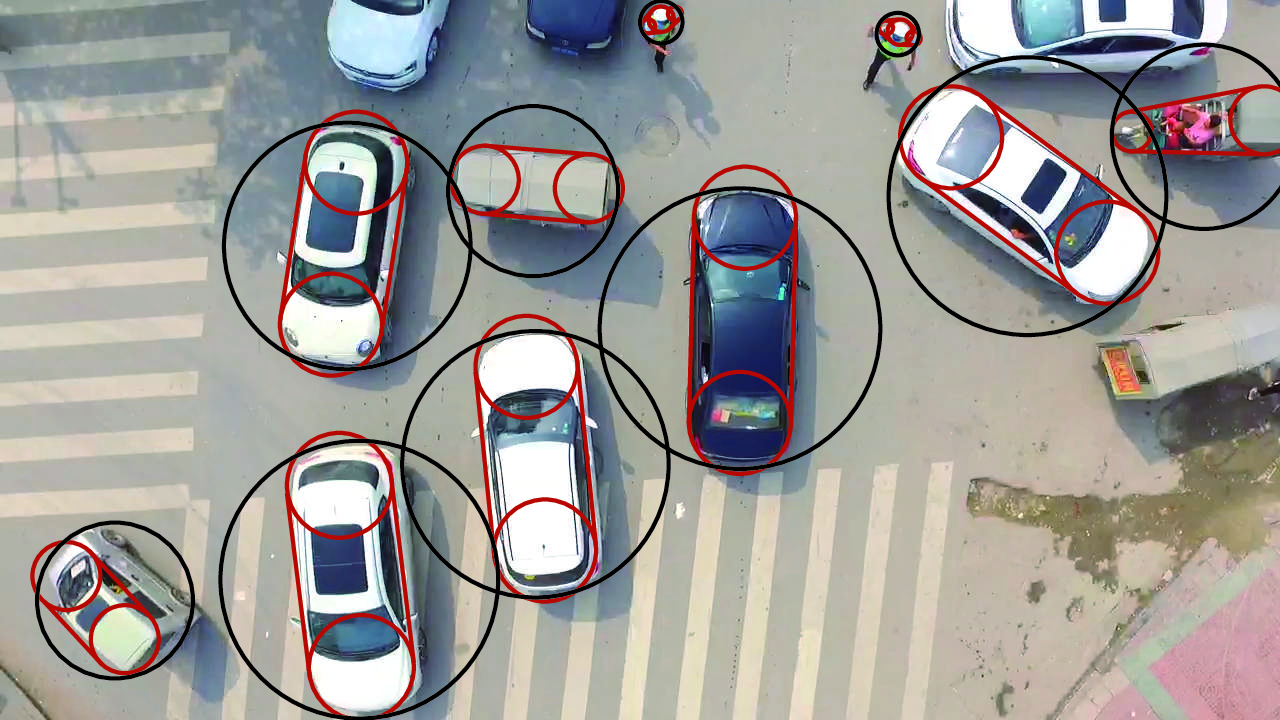
Figure 1: Comparison between the representation of disk (black) and our medial-axis-based representation (CTMAT in red).
The algorithm considers the exact positions and velocities of agents, employing reciprocal velocity obstacles with dynamic constraints to optimize trajectory computation. AutoRVO first calculates preferred velocities based on environmental analysis and dynamic feasibility, then refines this computation through local optimization techniques, ensuring realistic interactions in complex settings.
The efficacy of AutoRVO is validated against real-world traffic scenarios, demonstrating significant improvements over previous schemes. Dense urban traffic data, captured using drones, provided baseline comparisons where AutoRVO's generated trajectories closely mirrored actual movements, showcasing high fidelity in simulation results (Figure 2).
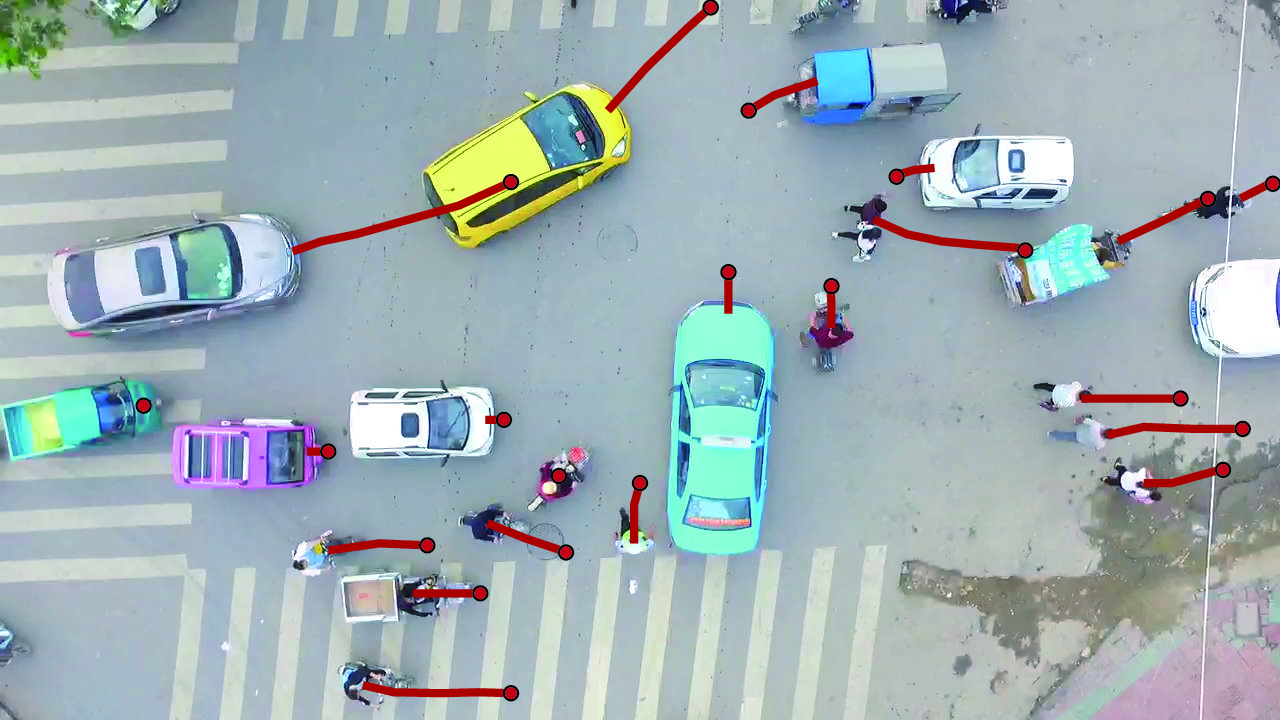
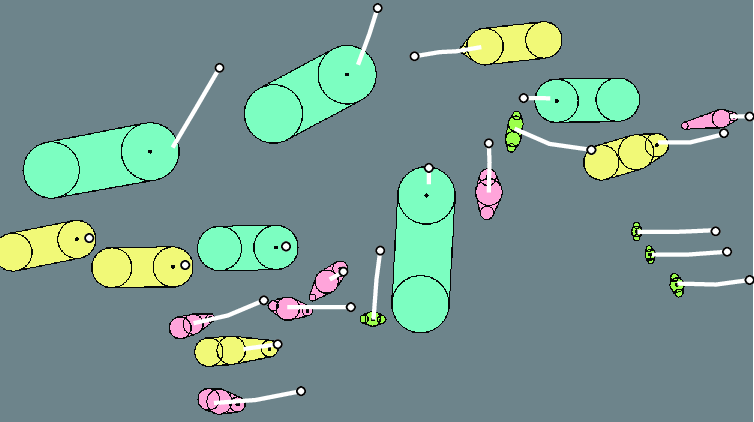
Figure 2: Dense traffic and navigation captured in a real-world scene with simulated trajectories of the AutoRVO algorithm.
Quantitative assessments using the Entropy metric confirm AutoRVO's superior accuracy, particularly in dense traffic conditions where other models may falter due to overly conservative geometric assumptions. This fidelity is evident in experiments highlighted by trajectory comparisons wherein AutoRVO consistently outperformed alternatives (Figure 3).
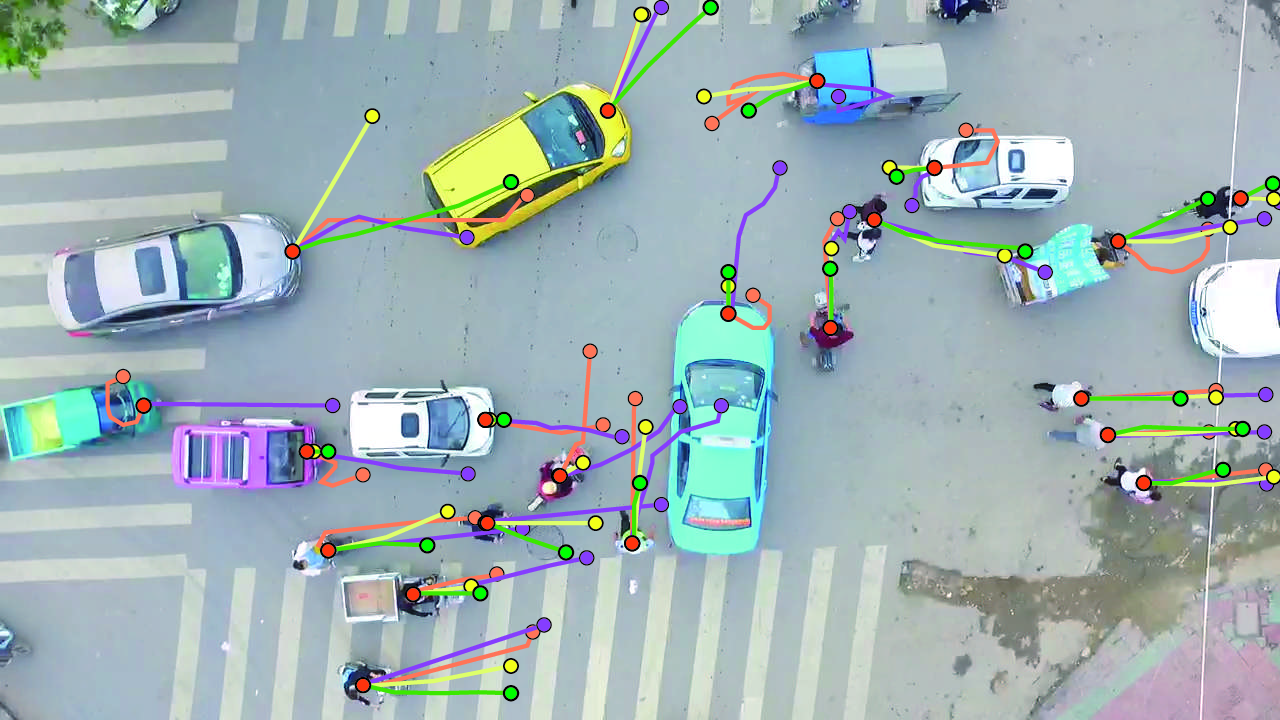

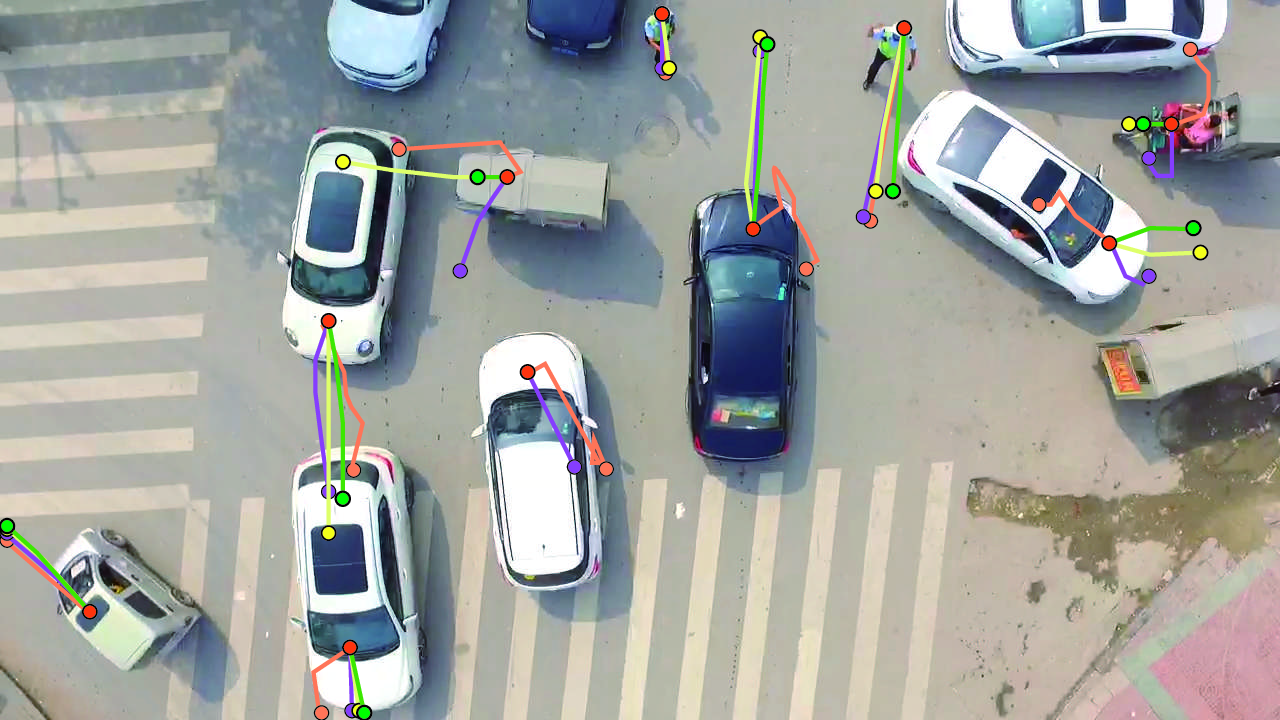
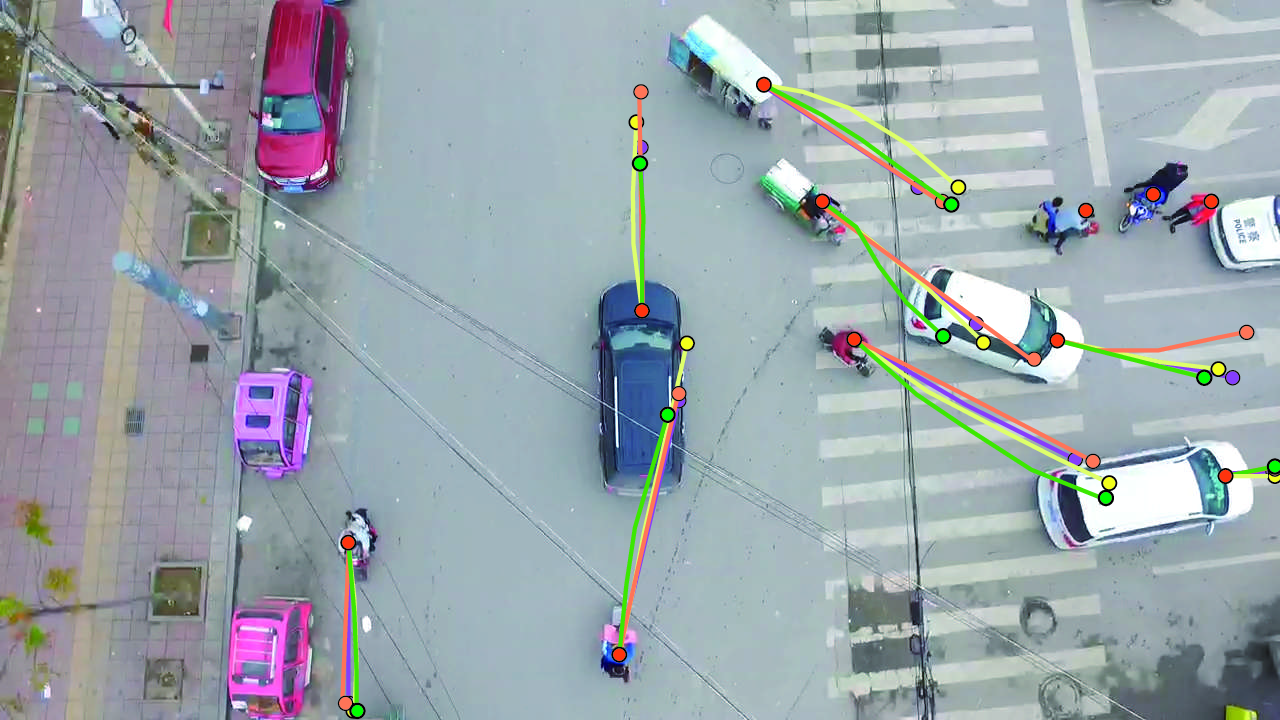
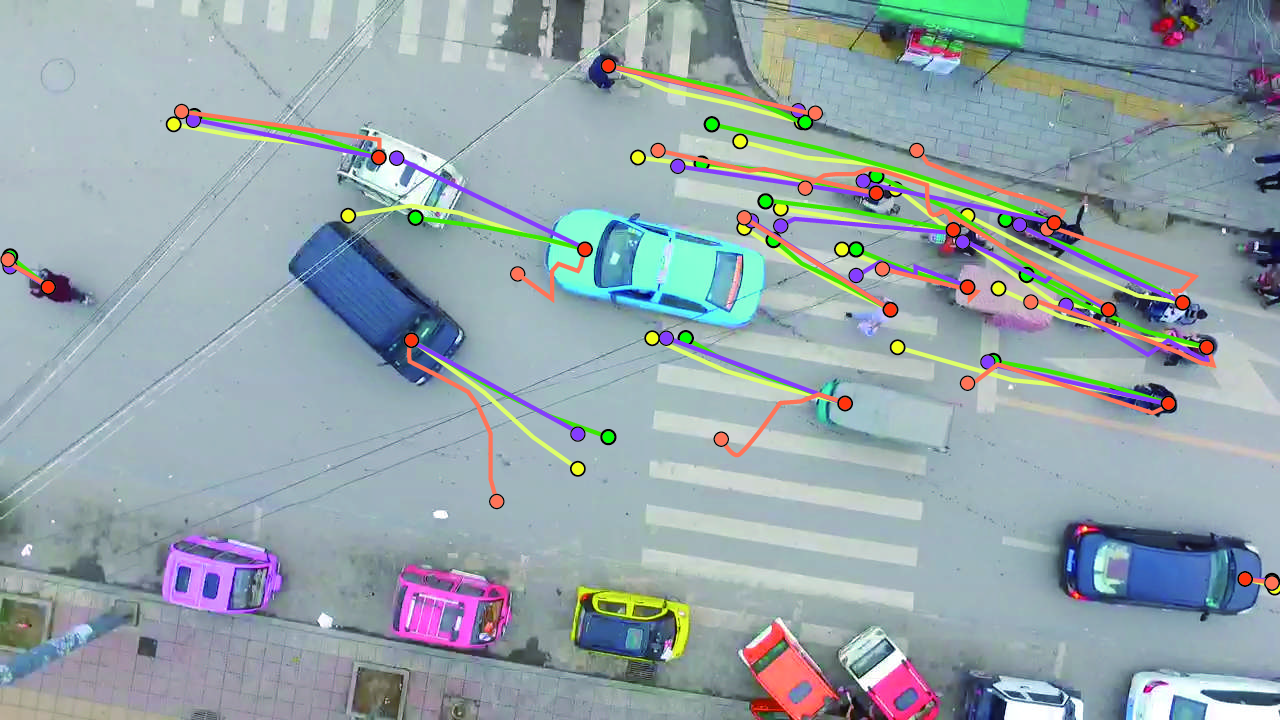
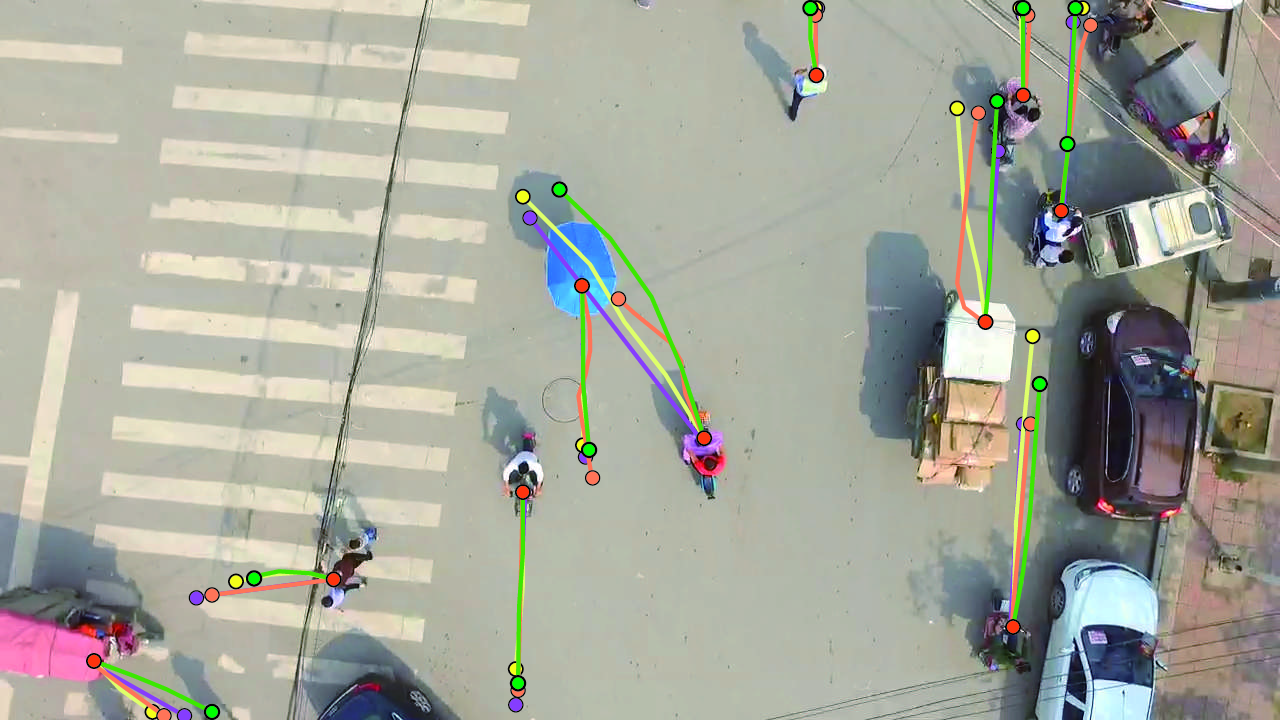
Figure 3: Comparison of real trajectories with simulated trajectories over various scenarios indicating higher accuracy with AutoRVO.
Implications and Future Directions
The introduction of AutoRVO opens new avenues for simulating realistic traffic conditions, potentially enhancing autonomous vehicle testing environments. By accurately rendering diverse agents' dynamic constraints, this approach serves as a robust framework for developing and evaluating autonomous navigation strategies under challenging conditions.
Future research could explore integration with sensor-fault tolerance mechanisms, expanding AutoRVO's applicability in real-world autonomous systems. Additionally, coupling this simulation with machine learning models may yield insightful predictive capabilities, refining road-agent interaction modeling for autonomous driving platforms.
Conclusion
AutoRVO represents a significant step toward realistic multi-agent navigation within dense heterogeneous traffic scenarios. Its methodological advancements refine trajectory computation, providing valuable insights into dynamic simulation and autonomous driving technologies. While certain assumptions regarding sensing and parameterization offer areas for further refinement, AutoRVO defines a compelling operational standard within complex navigation tasks.

