- The paper introduces a differentiable, CAD-native framework that employs an MLP-based neural deformation field to optimize NURBS geometries under hydrostatic and geometric constraints.
- It integrates analytical B-spline derivatives and high-order Gauss-Legendre quadrature within a two-stage optimization (AdamW then L-BFGS) for robust gradient-based control.
- Experiments on a KVLCC2 hull demonstrate minimal errors in wetted area, volume, and centroid, outperforming traditional FFD and direct control point methods.
Introduction
This paper introduces a differentiable, CAD-native framework for the constrained optimization and parametrization of industrial geometries represented by multipatch NURBS surfaces. The framework employs a neural deformation field, defined by a Multi-Layer Perceptron (MLP), which acts directly on the control points of NURBS patches. Global hydrostatic and geometric constraints—such as displaced volume, wetted surface area, and centroid position—are formulated as differentiable integral operators in the parametric domain. Gradient-based optimization is achieved without recourse to problem-specific adjoint equations or mesh-based computations, separating this work from traditional Free-Form Deformation (FFD) and mesh morphing pipelines.
Methodological Framework
The geometry is represented as a collection of standard NURBS surfaces with fixed polynomial degrees, knot vectors, and weights; design variables are exclusively the control points. The MLP takes as input these control points and outputs displacement vectors, ensuring watertightness at patch interfaces and imposed symmetry conditions along physically mandated planes. This operator is initialized to produce zero displacement, preserving the geometry at initialization.
Integral constraints are enforced through high-order Gauss-Legendre quadrature in the parametric domain (u,v)∈[0,1]2, with analytical B-spline derivatives providing exact tangent and normal information. This hybridization of automatic differentiation (for the neural network parameters) and analytical geometry kernels (for metric terms) is critical for computational tractability and precision in evaluating constrained integrals.
The optimization problem consists of minimizing a composite loss: a sum-of-squares on relative errors of global constraints (volume, surface area, centroid), hard geometric barriers (specifically, a maximum-draft constraint as a ReLU-penalized loss), and a physically integrated exponential regularization that penalizes large, unphysical displacements. The MLP acts as a global deformation regularizer, suppressing high-frequency modes that arise in direct control-point optimization. Optimization proceeds in two stages: AdamW for initial exploration, followed by L-BFGS for rapid convergence in the local basin.
Convergence and Numerical Integration
Numerical stability and quadrature convergence of the global integral constraints are analyzed extensively.
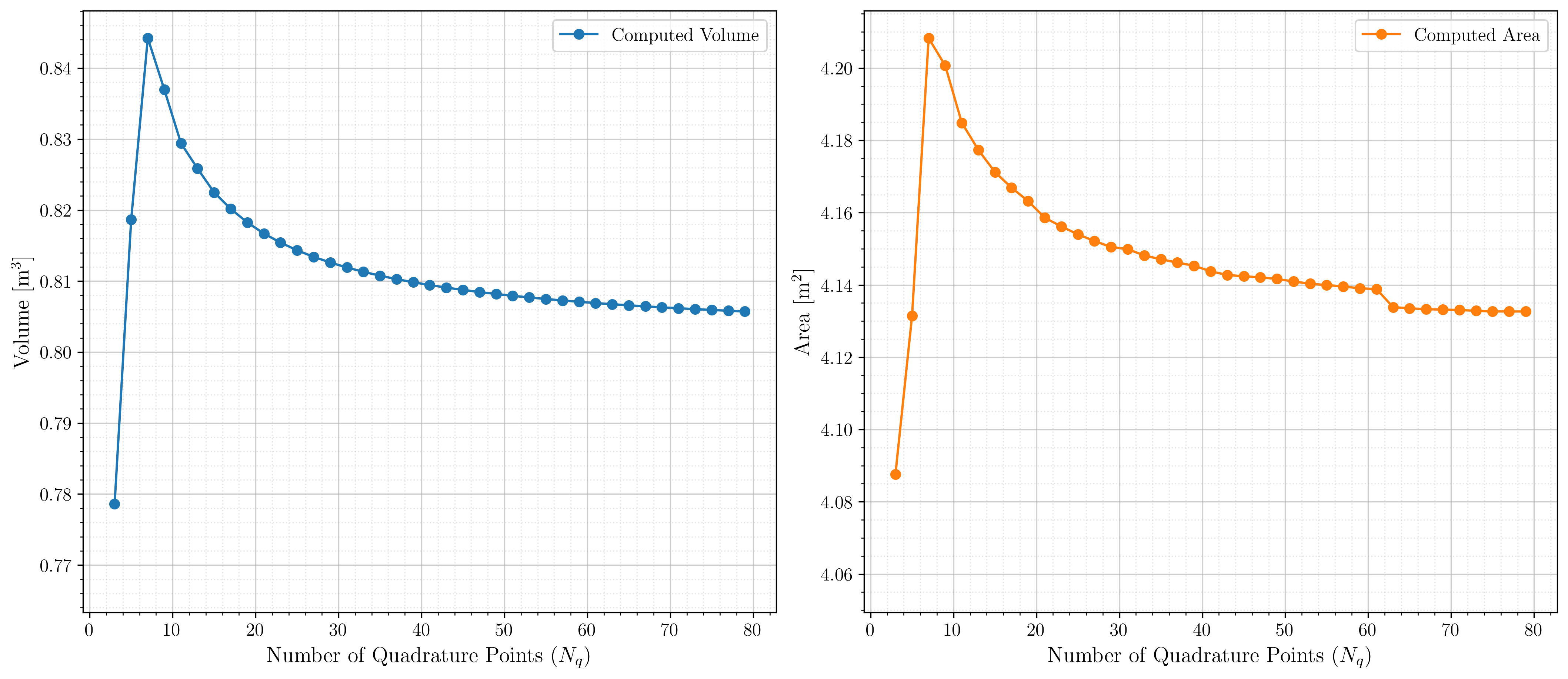
Figure 1: Convergence of volumetric and surface integrals under increasing quadrature resolution, establishing Nq=18 per dimension as optimal for negligible integration error compared to gradient magnitudes.
This careful quadrature analysis ensures that numerical integration noise is subsumed by the true analytical gradients of the deformation parametrization, precluding spurious oscillations during training. The accuracy and computational efficiency realized here are necessary for stable optimization over rich deformation spaces.
Optimization Results and Geometry Analysis
The pipeline is validated on a multipatch NURBS CAD model of a KVLCC2 hull. The design task enforces a 3% reduction in wetted area and a 5% reduction in draft, with strict volume and longitudinal centroid preservation. The MLP-parameterized deformation achieves:
- Wetted area relative error: +0.16% (2.8% net reduction from initial),
- Volume conservation: -0.076% error,
- Draft satisfied: -0.018%,
- Longitudinal centroid error: 10−5 m.
These metrics are robust across 20 random MLP initializations, with standard deviations below 0.08% for the most sensitive metrics. The network consistently discovers global, smooth deformations—expanding the hull beam at midship and reshaping the bulbous bow to compensate for the constrained draft-induced volume loss.
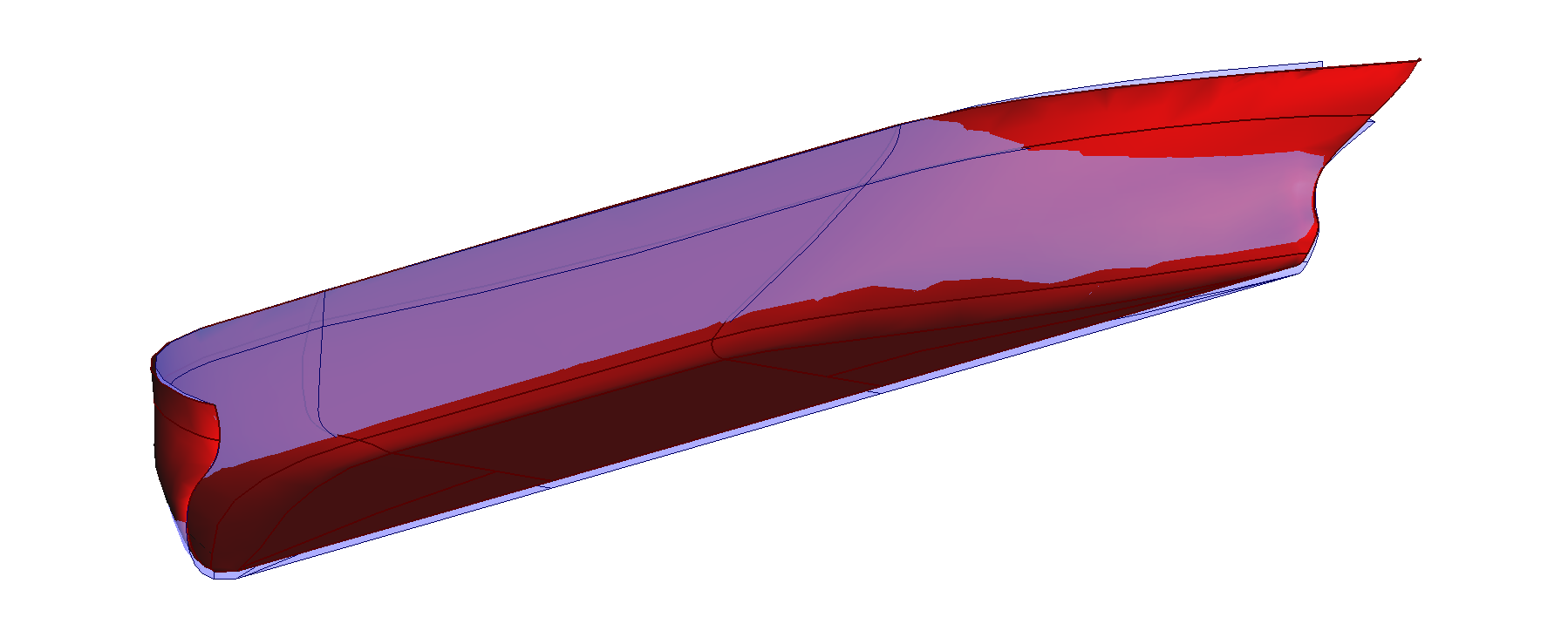
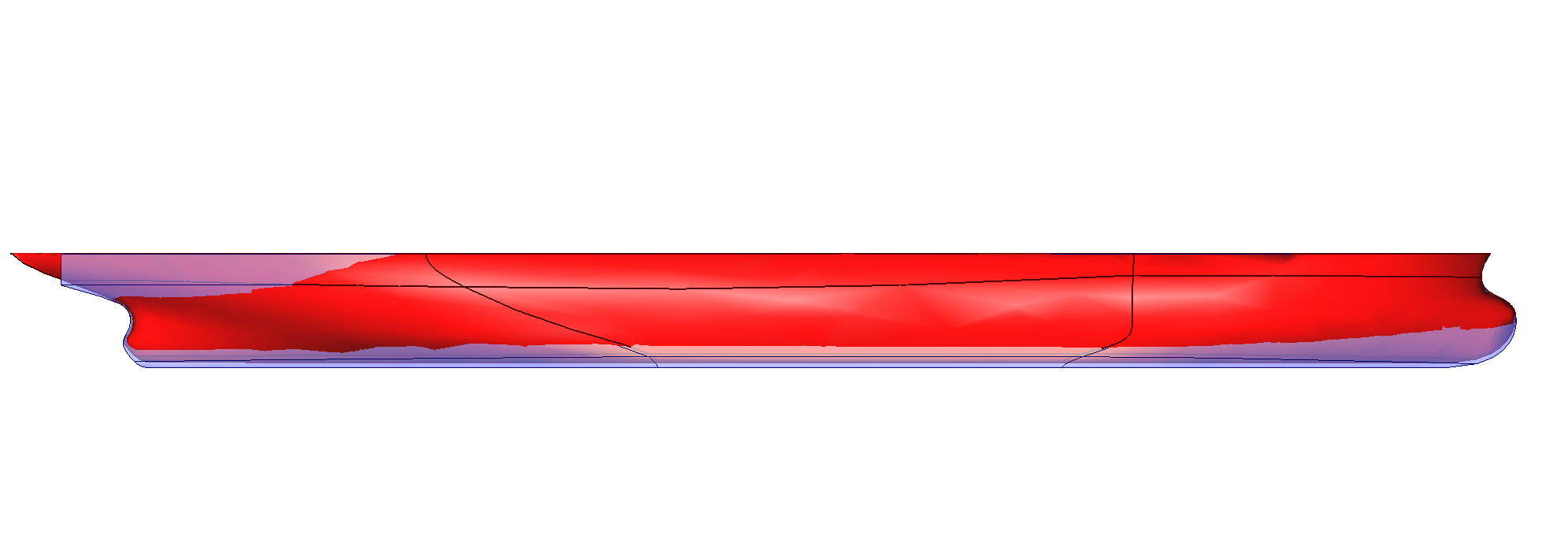
Figure 2: Overlay of initial (blue) and optimized (red) hull geometries. Notable transverse beam expansion and local bow reshaping emerge as the learned compensation for draft-limited hull volume.
Comparative Analysis
Against a high-resolution FFD baseline, the neural field matches or exceeds metric performance, but demonstrates stronger geometric regularity—especially at interfaces and in local feature control—without requiring the ad hoc grid resolution tuning necessary for FFD. The neural parameterization’s intrinsic low-pass filtering suppresses the high-frequency artifacts and control-point noise endemic to extrinsic deformation.
Direct Control Point Optimization
Bypassing the neural parametrization and optimizing control points directly leads to severe geometric degradation, including loss of C0 continuity at patch interfaces and unphysical, high-frequency surface oscillations. The MLP-regularized deformation prevents these artifacts, ensuring industrial compatibility without explicit continuity constraints.
Robustness and Regularization Sensitivity
Variance across stochastic MLP initializations is negligible; the optimization pipeline is robust to initialization, consistently converging to physically plausible hulls. Regularization scaling enforces a critical trade-off between attainable physical targets and geometric fidelity. As the regularization weight increases, solutions become geometrically stiffer (i.e., with smaller L2 centroid shifts), but constraint satisfaction degrades markedly. Physics-conforming design is only achieved for λreg≤10−4; beyond this, volume and area errors become pronounced.
Theoretical and Practical Implications
This framework reconceptualizes optimization of industrial CAD geometries through a fully differentiable, control-point-centric approach. It:
- Enables direct gradient-based optimization under global functional constraints,
- Avoids mesh dependencies and adjoint equation implementations,
- Offers intrinsic regularization required for industrial geometry smoothness,
- Outputs valid IGES-compatible CAD models with preserved patch connectivity,
- Allows robust handling of multipatch configurations without bespoke interface enforcement.
The decoupling from mesh generation and explicit adjoint codes dramatically reduces workflow complexity and expands the feasible design space for practical engineering optimization.
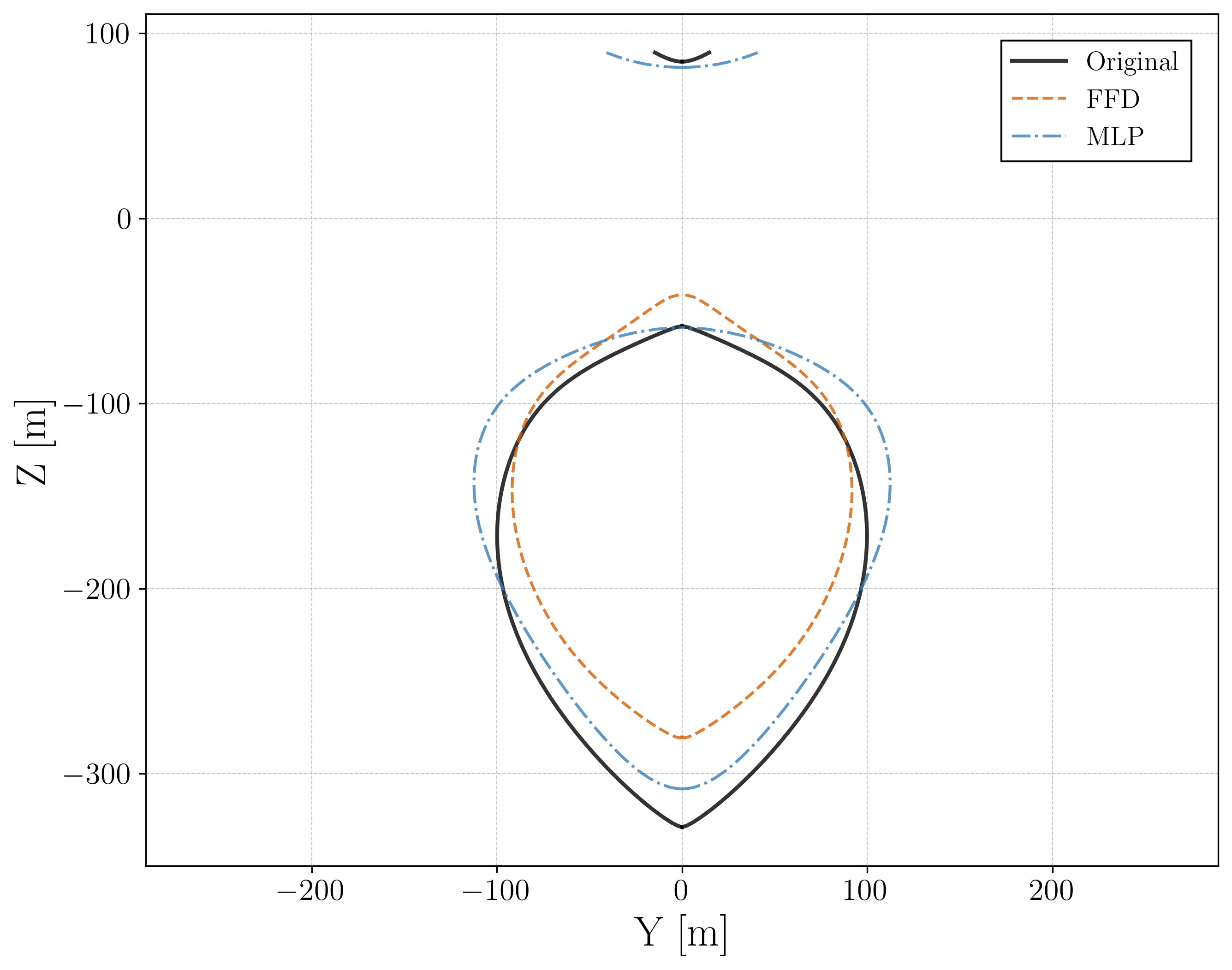
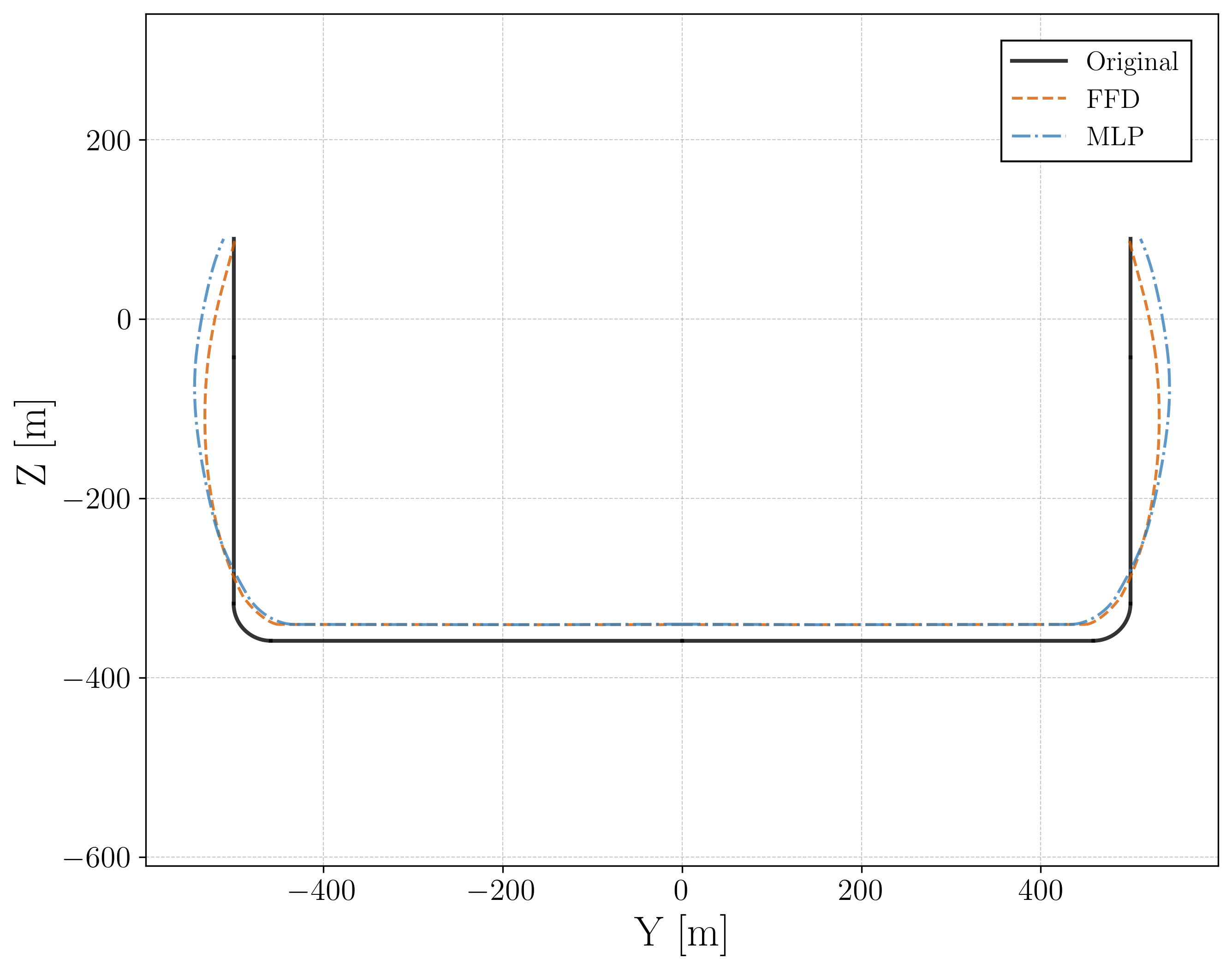
Figure 3: Sectional view at bow, exhibiting differential deformation between baseline, FFD, and neural parameterizations.
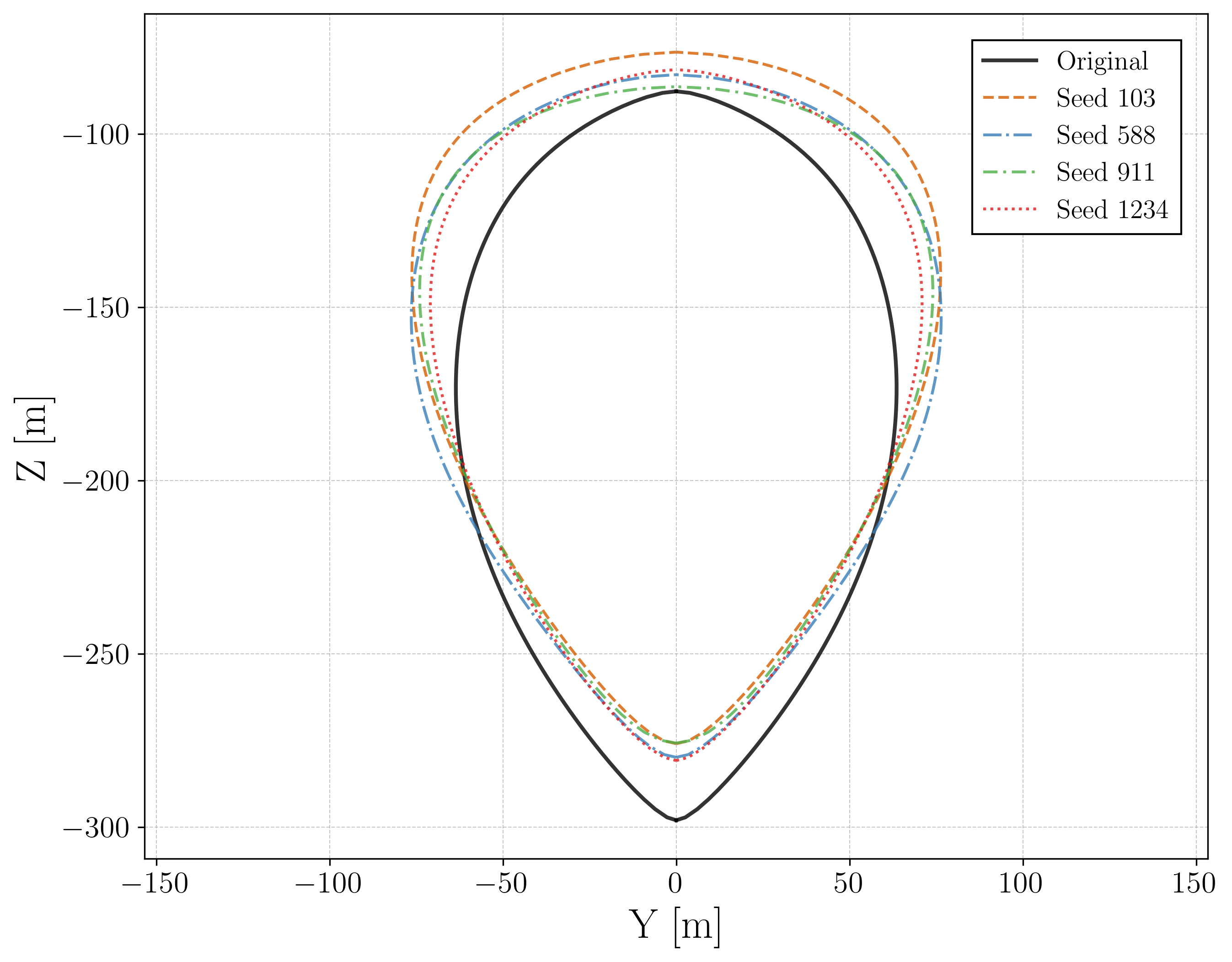
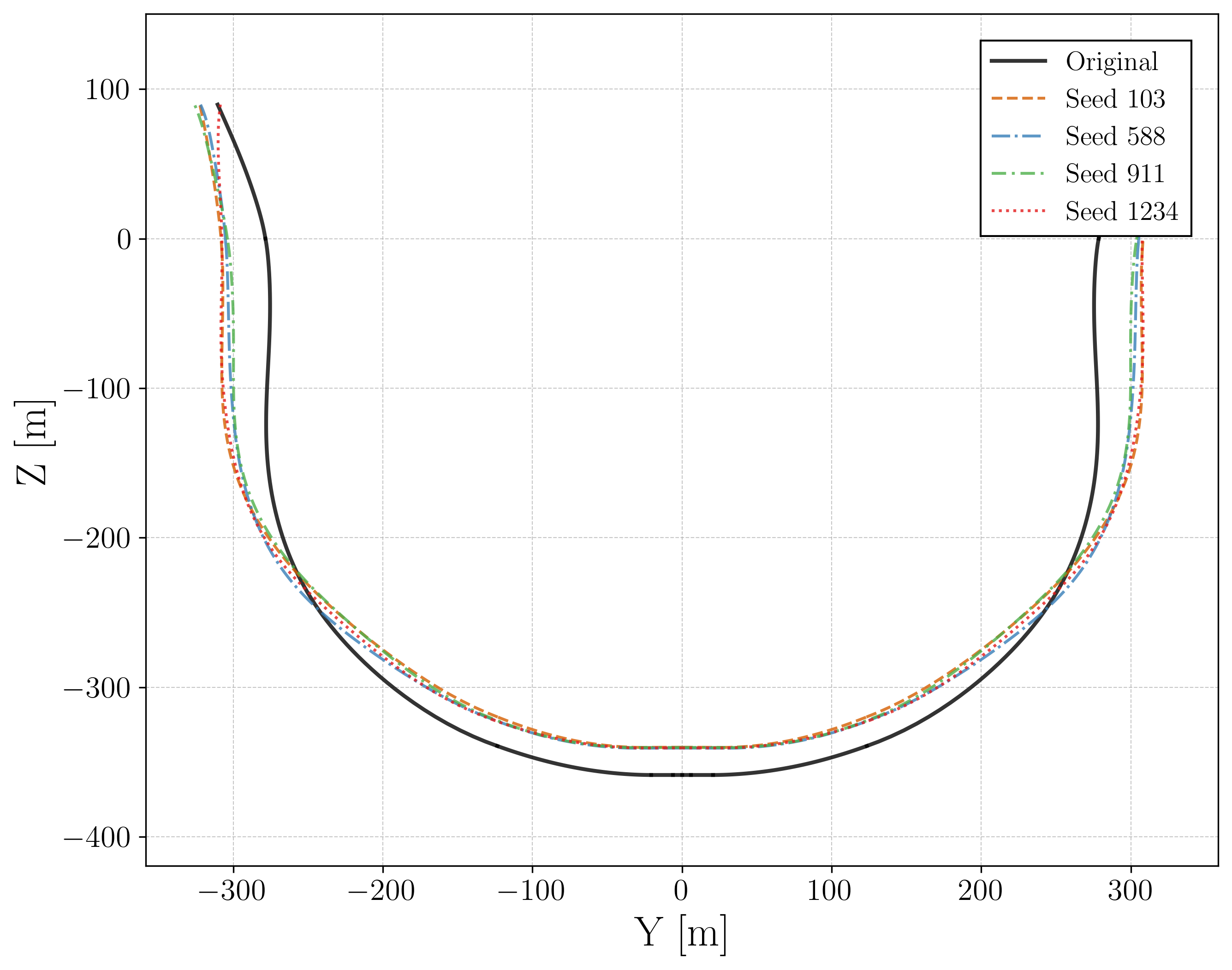
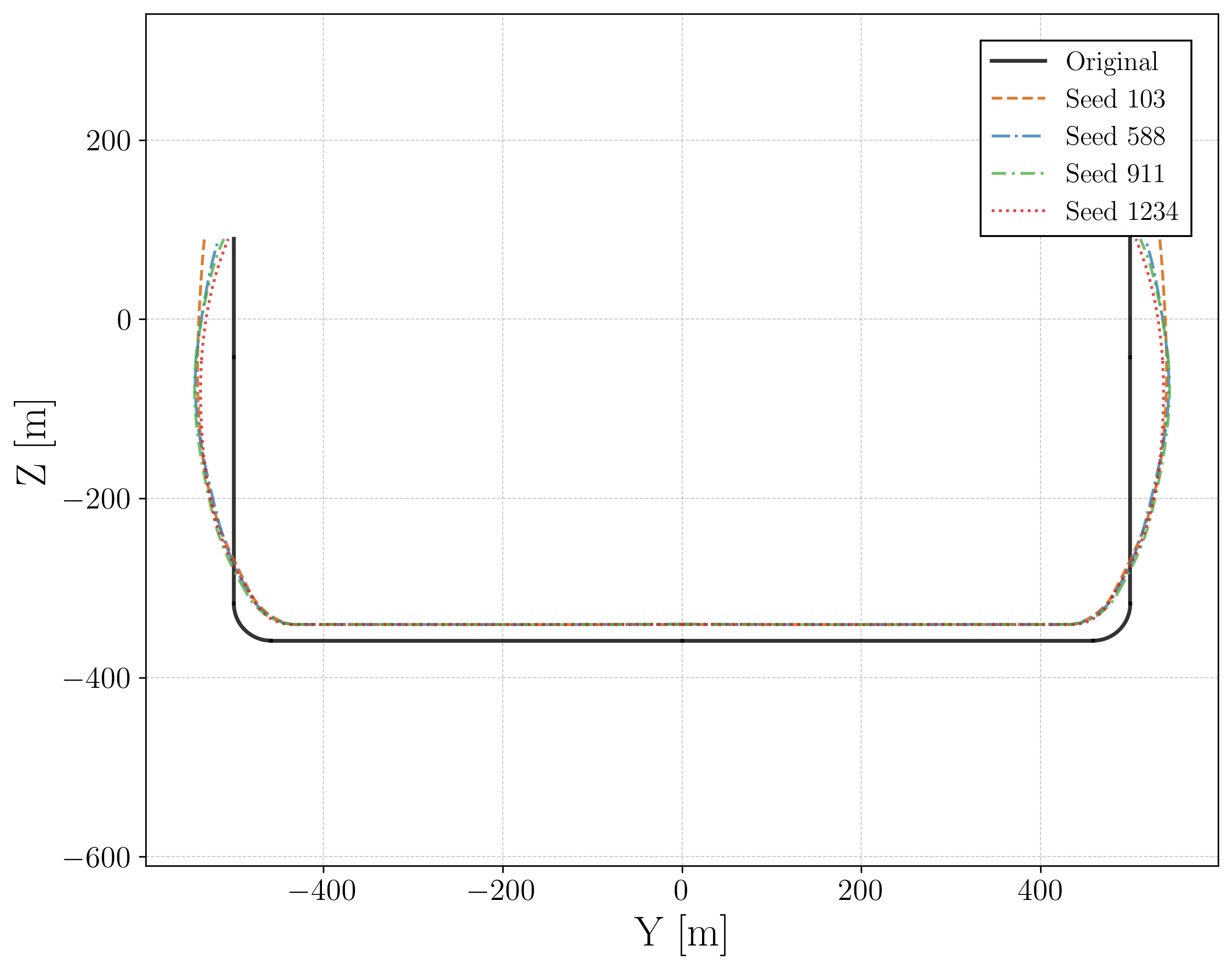
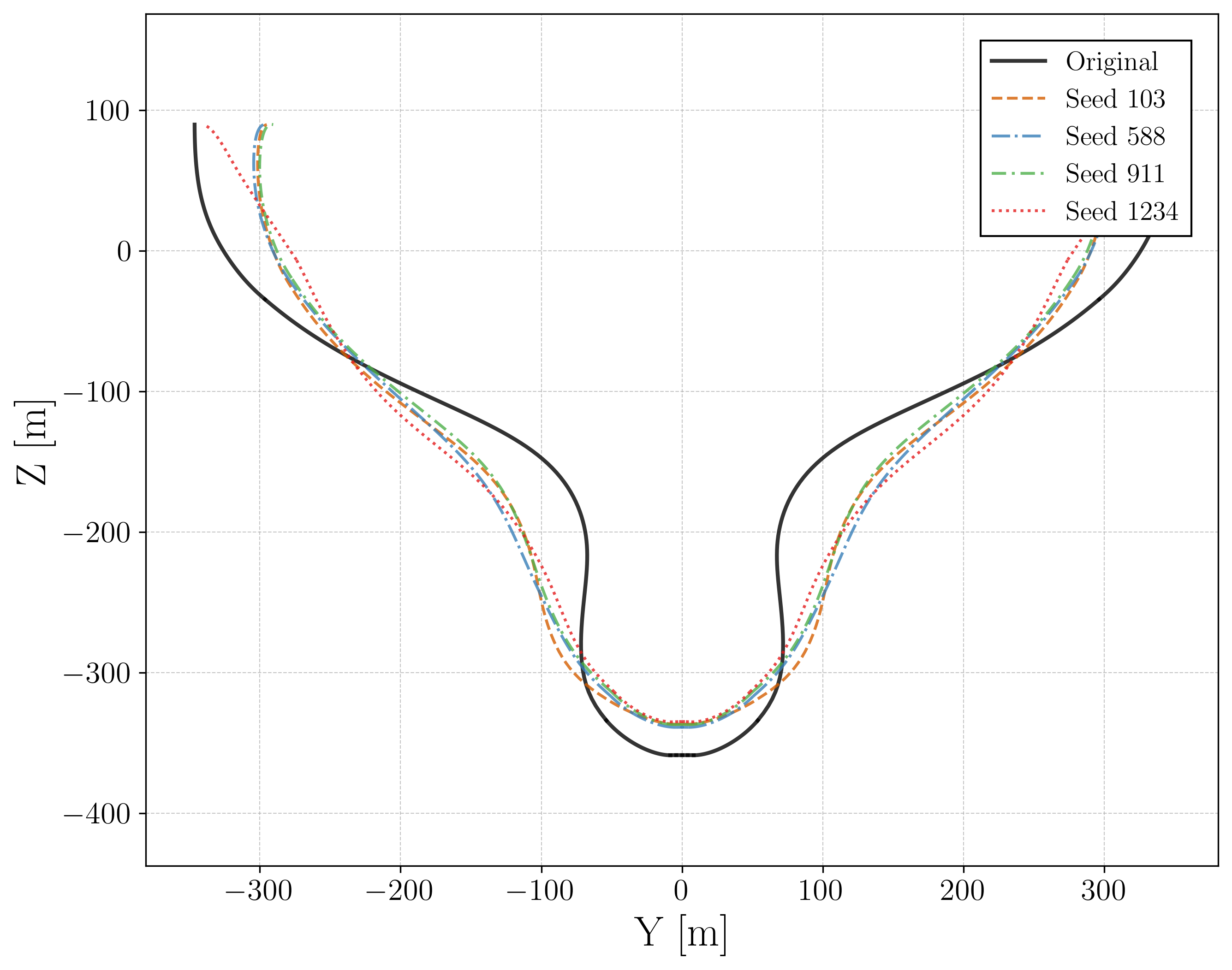
Figure 4: Extreme stern cross-sectional slice highlighting localized geometric adaptation.
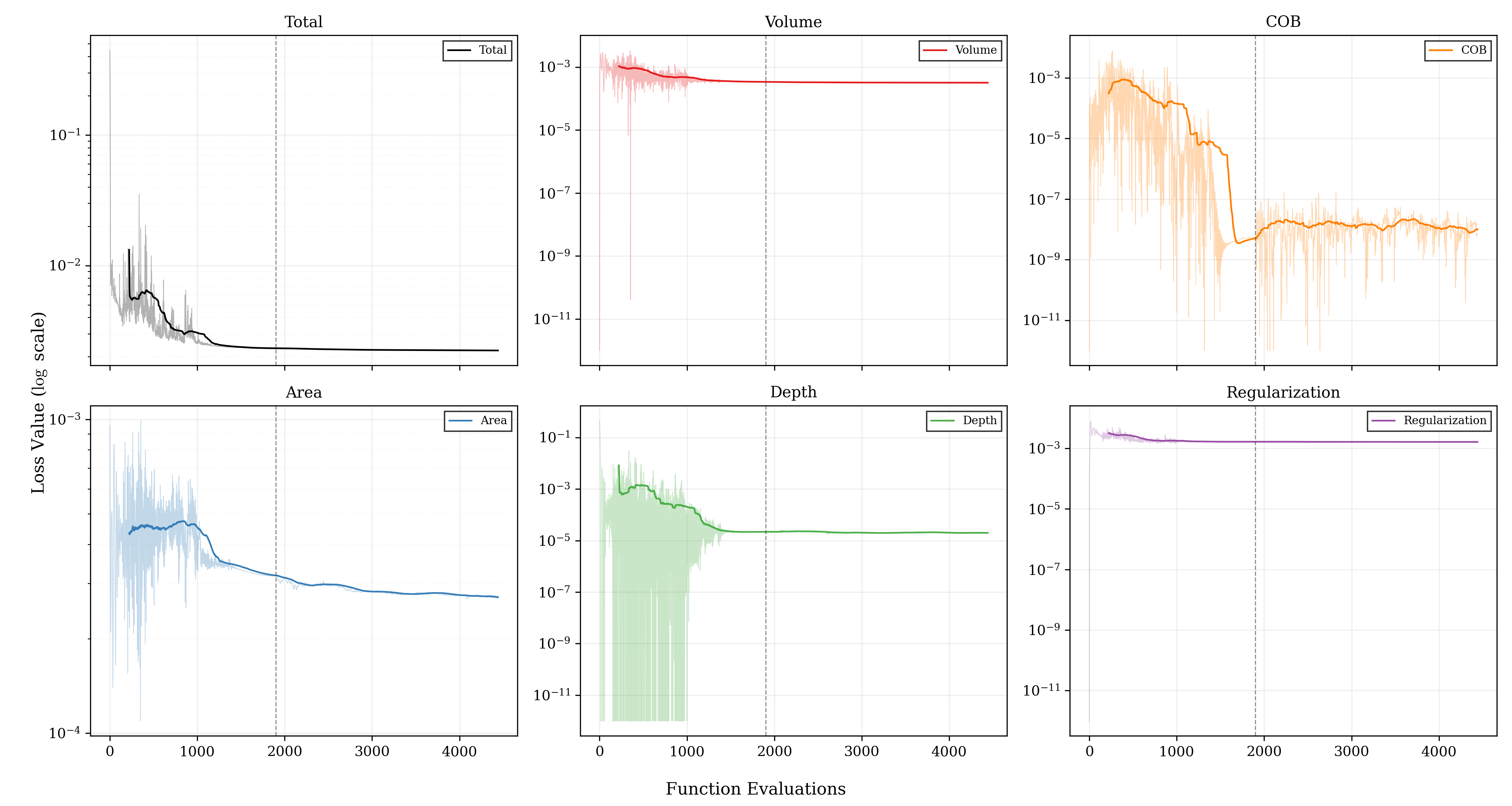
Figure 5: Example of layout and convergence under low regularization, demonstrating global smoothness and precise constraint satisfaction.
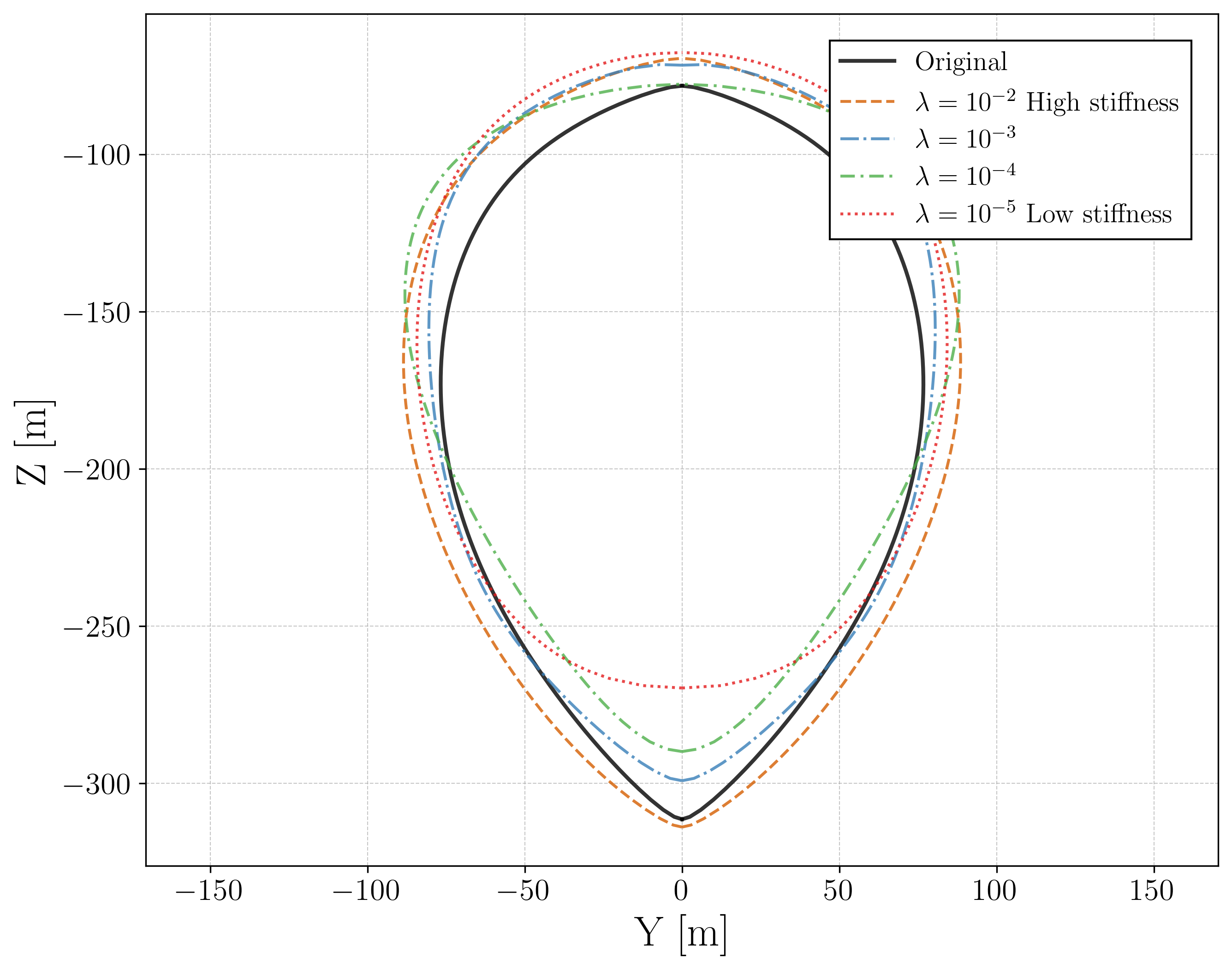
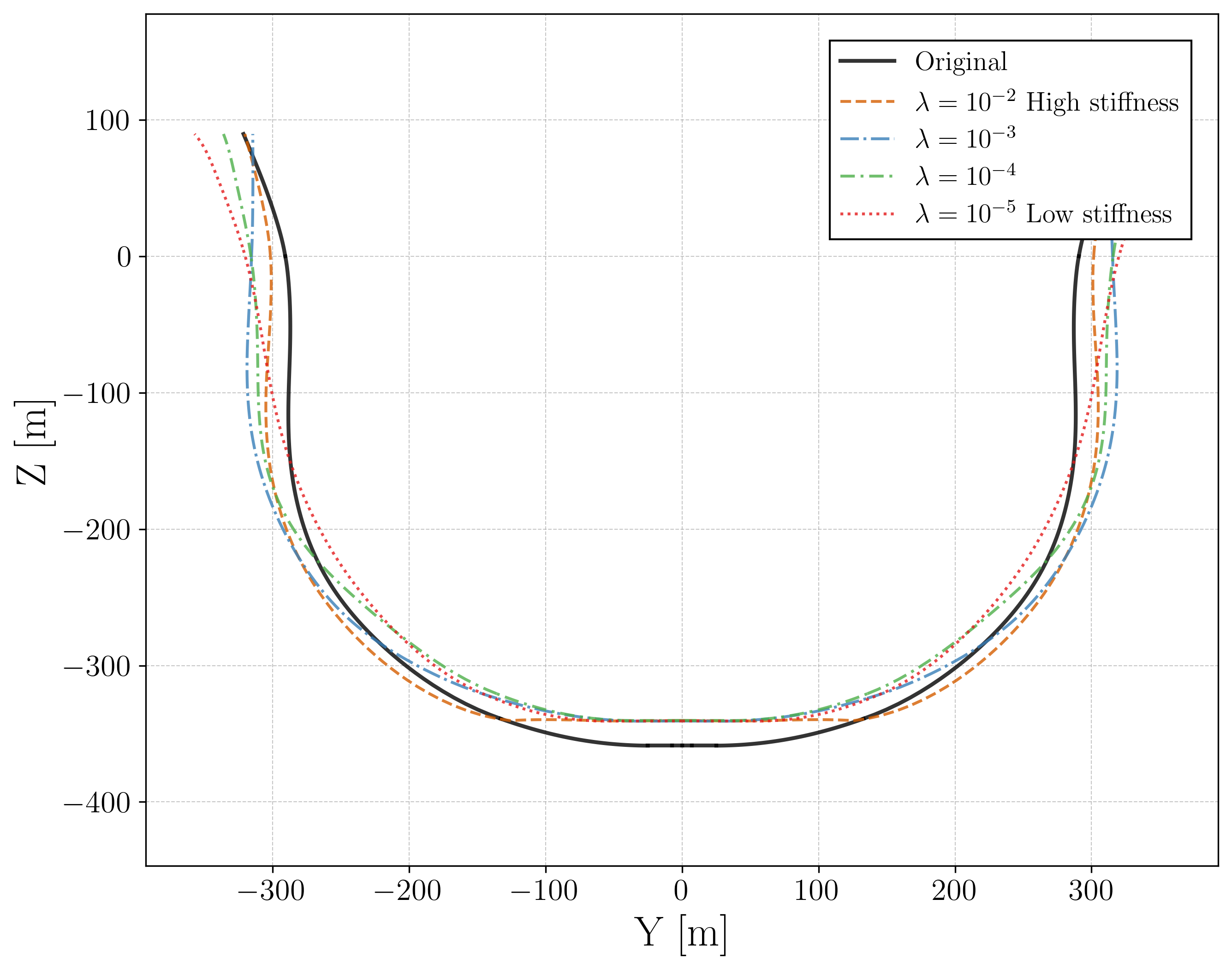
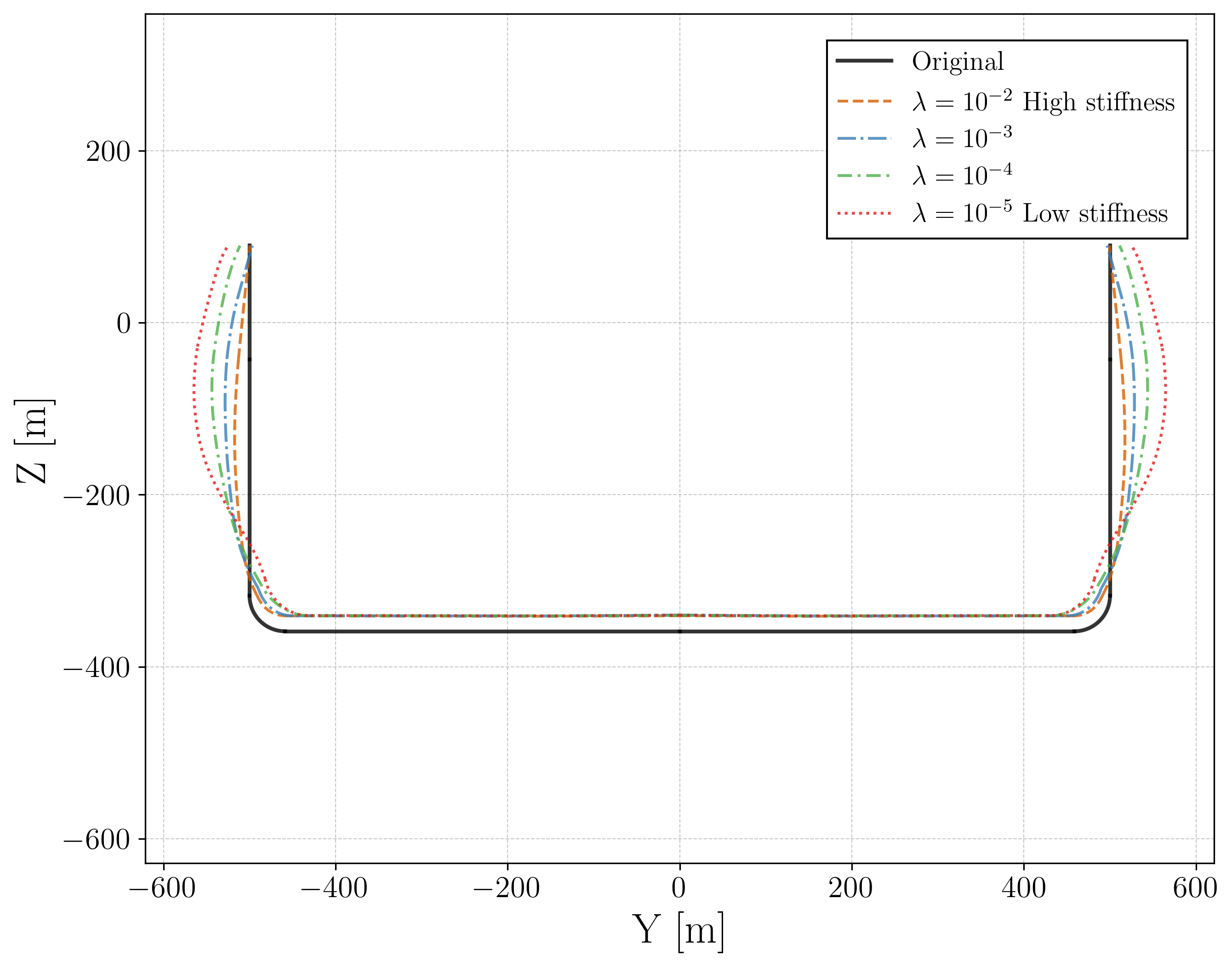
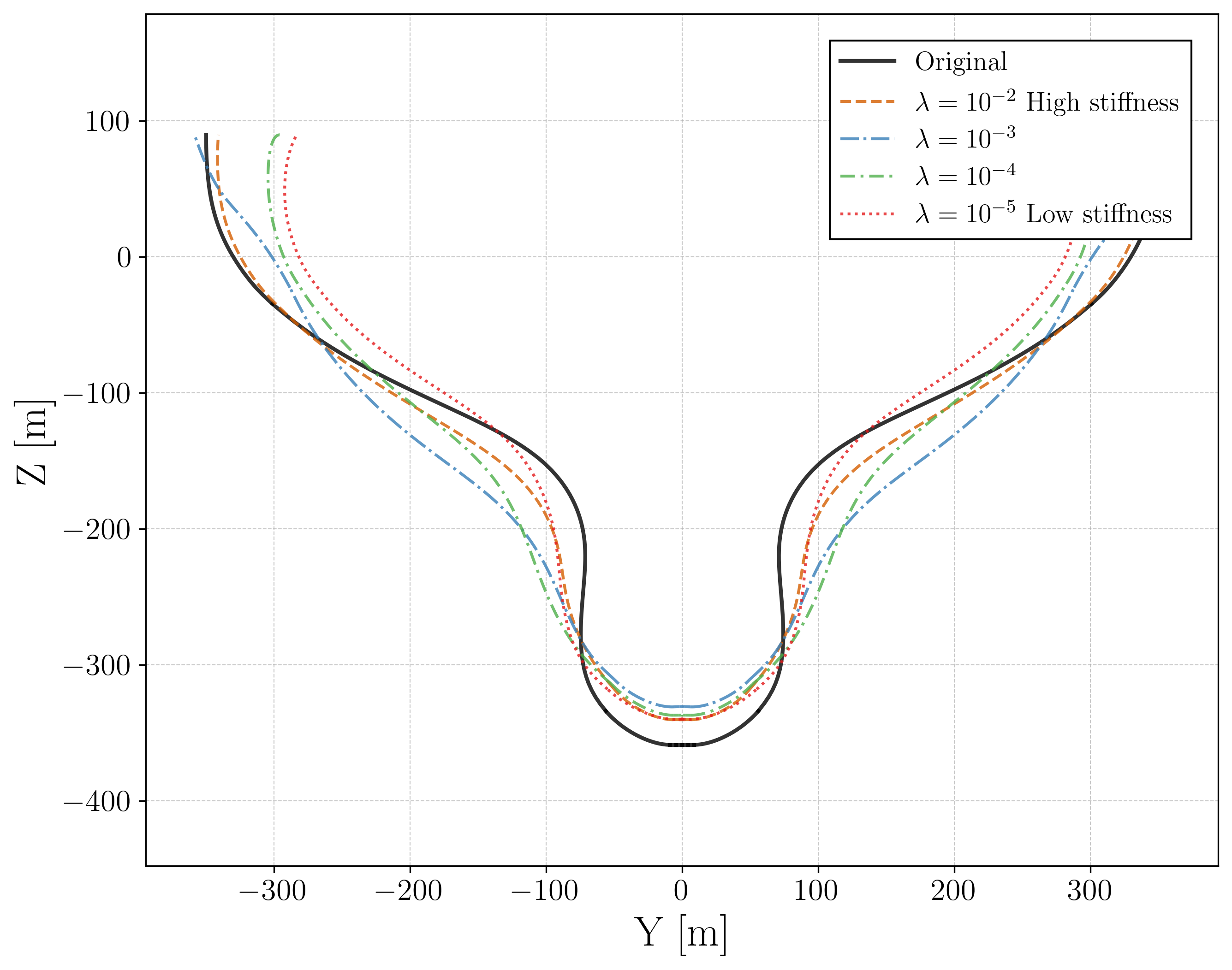
Figure 6: Cross-section at extreme stern, illustrating smooth control point evolution under well-tuned regularization.
Conclusions
This work establishes an end-to-end, differentiable optimization pipeline for NURBS-represented CAD objects, leveraging neural field deformation for direct constraint-driven shape adaptation under industrial geometric regularity. The MLP-based parametrization offers robust, smooth deformations, superior to classical FFD and direct control-point approaches, while ensuring exact CAD compatibility. The elimination of mesh dependencies and explicit adjoints, together with strong regularization and precise integral constraint enforcement, marks substantial progress towards practical, CAD-native, AI-driven engineering design automation.
Future efforts may extend this framework to trimmed NURBS, higher-order continuity, and full PINN-based PDE-constrained design, ultimately targeting direct physical performance optimization (e.g., minimal drag or stress). Analytical integration of B-Spline polynomials may further improve efficiency. The approach generalizes readily to any scenario wherein shape optimization under physical constraints on CAD-native geometries is required, providing a pathway to fully automated, differentiable PLM pipelines.
Reference: "Constraint-driven Optimization and Parametrization of Industrial NURBS Geometries via Neural Deformation Field" (2606.07198).