- The paper presents a dual strategy integrating reliability-based active pooling and uncertainty-guided sampling to overcome catastrophic forgetting in neural LiDAR mapping.
- It reduces memory footprint by over 50% and enhances reconstruction quality with improved recall and F1-scores compared to leading methods.
- The approach accelerates convergence by dynamically allocating training samples to under-observed regions, ensuring more complete and efficient 3D scene reconstructions.
LAPS: A Replay-Optimized Framework for Incremental Neural LiDAR Mapping
Introduction and Motivation
Incremental 3D LiDAR mapping using neural distance fields has enabled dense, compact representations necessary for online robotics applications. However, these systems are fundamentally limited by catastrophic forgetting, driven by the tension between online adaptation and partial observability. Replay buffers mitigate this by interleaving historic and current supervision—yet, the efficacy of replay depends critically on the spatial and statistical characteristics of both sample retention (pooling) and replay (sampling). The paper "LAPS: Improving Incremental LiDAR Mapping using Active Pooling and Sampling for Neural Distance Fields" (2605.15496) addresses the core limitations of passive buffer management by introducing a unified, online replay management framework—LAPS—engineering both memory-efficient retention and optimization-efficient sampling in the context of neural TSDF mapping.
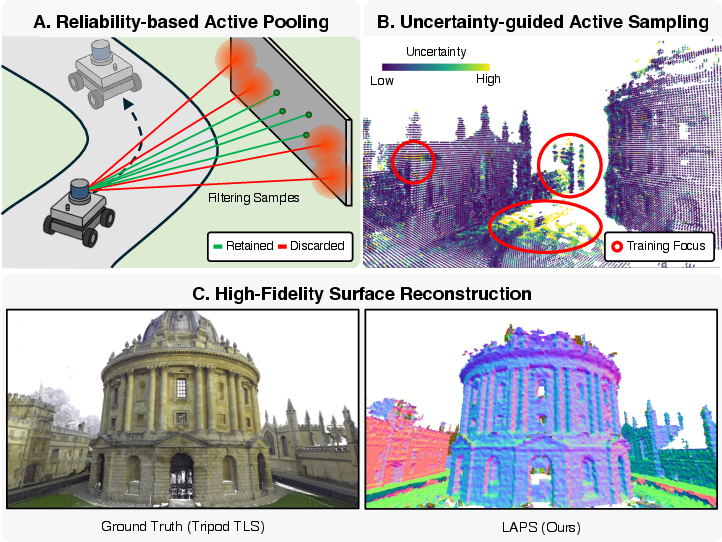
Figure 1: LAPS incrementally reconstructs 3D scenes from LiDAR using neural distance fields, jointly managing replay via reliability-based active pooling and uncertainty-guided active sampling for optimal memory and training.
Methodology
LAPS consists of two tightly integrated components: reliability-based active pooling for replay retention, and uncertainty-guided active sampling for training allocation. These components collectively improve memory scaling and training efficiency while prioritizing incremental scene coverage in under-constrained regions.
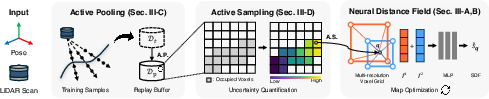
Figure 2: The LAPS pipeline maintains and updates the neural distance field online by converting each LiDAR scan to TSDF supervision samples, managing them with active pooling and uncertainty-driven sampling during optimization.
Neural Map Parameterization
The system maintains a multi-resolution sparse voxel grid, with each cell storing learnable feature vectors. These are trilinearly interpolated and fed into a globally-shared MLP decoder to predict TSDF values. The grid allocation is dynamic and demand-driven.
Obtaining Supervision
Incoming LiDAR scans generate samples along each ray (in front of, on, and behind surfaces) for TSDF labeling. Surface normals are estimated for each scan for incidence calculations, and all sample-label tuples are maintained in the replay buffer.
Reliability-Based Active Pooling
Conventional buffer update strategies either rapidly exhaust memory or induce spatial bias by retaining samples in oversampled regions. LAPS addresses this by enforcing a per-voxel capacity τ: when samples in a voxel exceed τ, the method selects the τ most "reliable" samples based on a combined metric of depth-dependent measurement uncertainty and incidence angle-induced bias, quantified by the expected squared error.
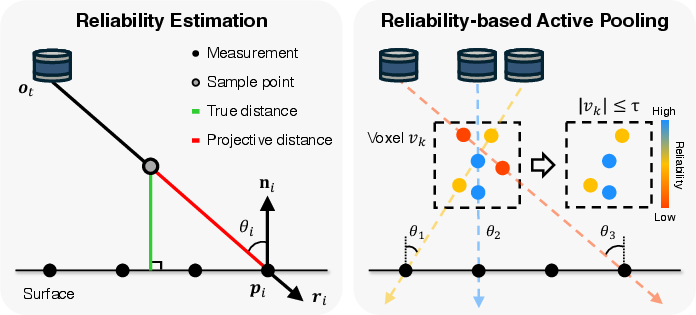
Figure 3: Reliability-based pooling ranks samples by expected squared error, selecting the most reliable per voxel and thus reducing memory growth and spatial redundancy.
This approach ensures that densely observed regions do not dominate the replay buffer and that scarce samples from under-observed areas are preserved. Empirically, this reduces memory consumption significantly—for instance, active pooling lowers buffer size by ~56% on Newer College.
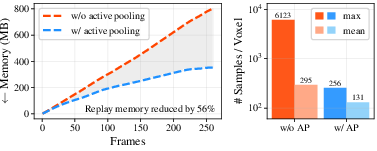
Figure 4: LAPS' active pooling constrains buffer memory, initially growing and then saturating due to the voxel cap, unlike unchecked linear growth with passive pooling.
Uncertainty-Guided Active Sampling
Beyond memory management, training allocation is restructured. Instead of uniform or random sampling from the buffer, LAPS dynamically estimates epistemic uncertainty at voxel centers using a Laplace-approximated covariance over the network parameters. Voxels are segmented into uncertain and certain sets, and each training batch is adaptively sampled: a fixed quota from uncertain voxels (to drive convergence where the TSDF is unconstrained) and the remainder from certain voxels (to regularize already learned geometry).
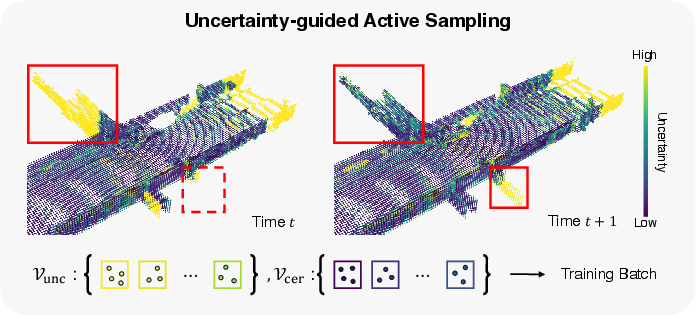
Figure 5: Uncertainty-guided sampling preferentially updates high-uncertainty voxels, with uncertainty estimates evolving as previously unsupervised regions get observed.
This scheme accelerates convergence, as shown by the increased F1 and recall in fewer optimization steps.
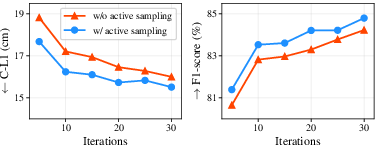
Figure 6: Prioritized sampling of uncertain voxels results in higher reconstruction quality in fewer iterations under a fixed optimization regime.
Empirical Evaluation
LAPS is evaluated on synthetic (MaiCity) and real-world datasets (Newer College, Oxford Spires), benchmarking against leading explicit and implicit mapping methods (PIN-SLAM, SHINE-Mapping, N3-Mapping, VDBFusion, Voxfield), all using identical pose supervision for fairness.
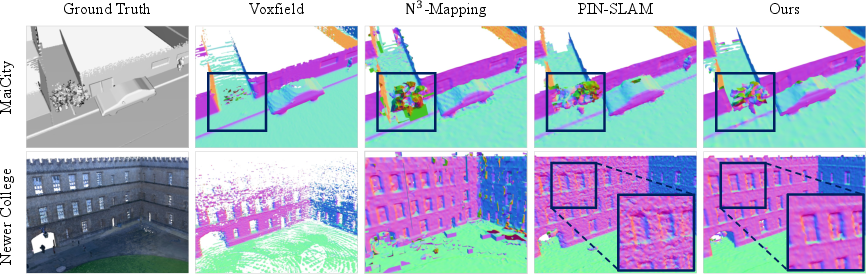
Figure 7: Qualitative results on MaiCity and Newer College highlight preservation of fine structure and surface completeness for LAPS relative to baselines.
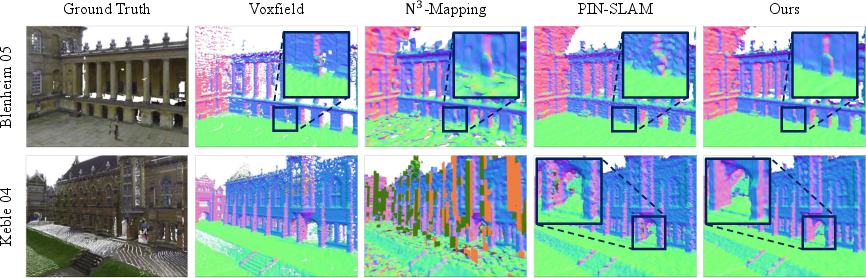
Figure 8: LAPS delivers a more spatially coherent and complete reconstruction on Oxford Spires, improving coverage over all neural and classical baselines.
Key Numerical Highlights
- On Oxford Spires / Blenheim Palace 05, LAPS improves recall by 4.66 percentage points and F1-score by 3.79 percentage points over PIN-SLAM.
- Across all benchmarks, LAPS consistently achieves the highest recall and F1, while sacrificing little to precision, indicating more complete scene coverage.
- Reliability-based pooling reduces buffer memory footprint by over 50% without loss in reconstruction quality.
- Uncertainty-guided sampling accelerates convergence, requiring fewer optimization steps for comparable or superior geometric fidelity.
Ablations and Runtime
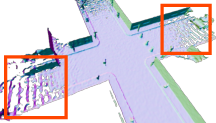
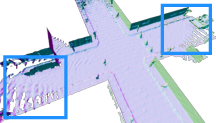
Figure 9: Without active pooling, reconstructions manifest large holes and fragmentation, validating the necessity of reliability-driven buffer control.
Ablations confirm that both pooling and sampling improvements are individually beneficial, but their combination yields the top performance. Runtime breakdowns show that active pooling and sampling add modest overhead, maintaining practical online rates comparable to state-of-the-art baselines.
Implications and Future Directions
This work reframes the management of online replay in neural 3D mapping as a dual optimization of memory and optimization efficiency. Its design can be generalized to any incremental learning system where spatial memory constraints and partial observability are bottlenecks. The successful integration of epistemic uncertainty for sampling points toward further active learning strategies in autonomous mapping, while the demonstrated gains in memory-use and training efficiency make LAPS deployable in resource-constrained, real-time robotic systems.
From a theoretical perspective, LAPS opens up new research in buffer stratification and adaptive sample selection under non-i.i.d. and spatially sparse supervision. Extensions could integrate active pose selection, hierarchical uncertainty modeling, or fuse with visual/radiance field cues in multi-modal SLAM frameworks.
Conclusion
LAPS delivers a reproducible, principled methodology for mitigating catastrophic forgetting in neural SDF-based LiDAR mapping. By combining reliability-driven buffer culling with uncertainty-prioritized replay, it achieves superior surface completeness, memory efficiency, and training convergence, as demonstrated across scales and scene complexities. Its framework establishes an empirical and algorithmic foundation for future adaptive replay and incremental learning systems in robotics and embodied AI.
(2605.15496)

