- The paper presents a modular integration architecture that encapsulates agent models as Functional Mock-up Units to ensure interoperability across diverse simulation tools.
- It demonstrates consistent, scalable performance in simulations—with metrics like time headway and acceleration profiles maintained across OpenPASS, CARLA, and CarMaker.
- The methodology minimizes integration effort by eliminating the need for custom code, thereby promoting reproducibility and cross-validation in safety-critical automated vehicle testing.
Standardized Integration of Agent Models in Scenario-Based Automated Vehicle Simulation
Introduction
The safety validation of automated driving systems necessitates comprehensive, reproducible, and scalable scenario-based testing methodologies. Simulative approaches offer orders of magnitude increases in testing efficiency compared to real-world driving, enabling evaluation across a broad spectrum of rare and safety-critical events. However, a persistent barrier persists in the lack of interoperability: models of road users (agents), sensors, and vehicles are typically built for, and locked to, proprietary simulation tools, impeding reuse, reproducibility, and cross-tool comparability. The paper "Integration of an Agent Model into an Open Simulation Architecture for Scenario-Based Testing of Automated Vehicles" (2605.13539) directly addresses this challenge by introducing a modular, standardized integration architecture for agent models, validated across multiple industry-leading simulation environments.
Architecture and Integration Approach
The proposed methodology couples two cornerstone standards: Open Simulation Interface (OSI) for scenario-grounded, protocol buffer data exchange and Functional Mock-up Interface (FMI) for model encapsulation and co-simulation. The implementation leverages the OSI Sensor Model Packaging (OSMP) framework, establishing a tool-agnostic bridge for integrating agent models into diverse simulation backends.
As illustrated, the agent model is encapsulated as an OSMP-compatible Functional Mock-up Unit (FMU), providing clear separation between the core simulation, the agent logic, and the data interfaces.
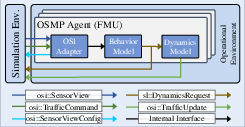
Figure 2: An agent model encapsulated as an FMU, interfacing with an OSI-based simulation architecture with modular layers for sensing, behavior, and dynamics.
The architecture supports bidirectional communication using OSI messages: the simulation environment provides real-time sensor views and traffic commands, while the agent responds with corresponding motion requests or direct pose updates. By structuring this interaction through FMI and OSI, models become both reusable and composable, without the need for simulator-specific code or custom adapters.
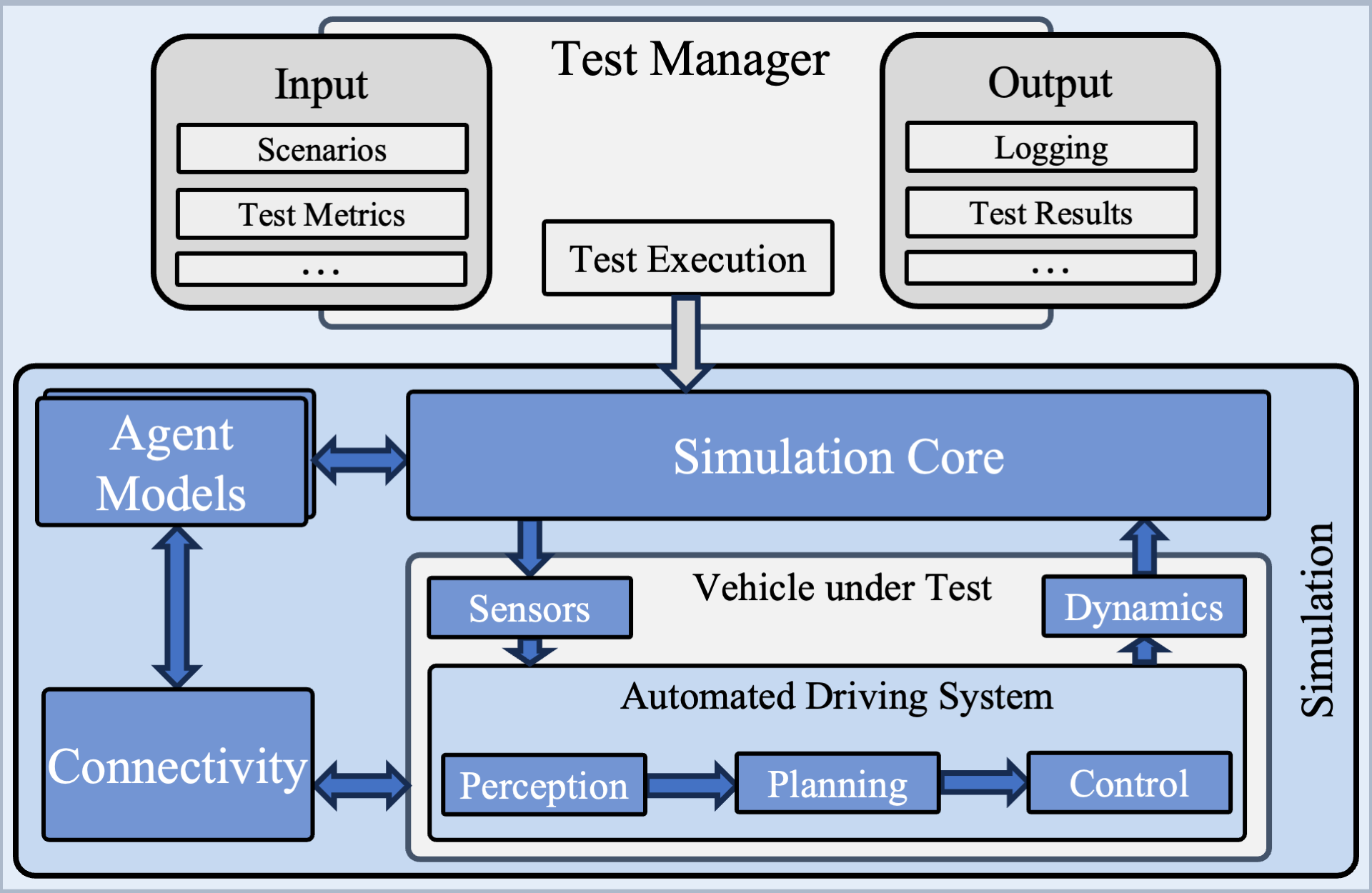
Figure 3: High-level simulation architecture where scenarios are defined externally, and agent models interface with the vehicle under test and other traffic participants through standardized closed-loop messaging and modular packaging.
Agent Model Design and Behavioral Realism
The integrated agent model is designed for human-like, naturalistic driving behaviors and supports parameterization for diverse traffic scenarios. It combines established models for longitudinal (IDM-based), lateral (two-point visual control), and tactical (Dijkstra-based route planning, multi-level lane change logic) layers, and is parameterized at runtime for flexibility and scenario fidelity. The architecture is explicitly designed to separate sensing, behavior, and actuation/dynamics, enabling both direct agent actuation and plug-in dynamics models.
Scenarios tested include free driving, vehicle following, proactive speed adaptation to traffic signals, and tactical lane changes. Automated validation is performed with OpenPASS, CARLA, and CarMaker, using identical scenarios and agent configurations to demonstrate result consistency and behavioral plausibility.
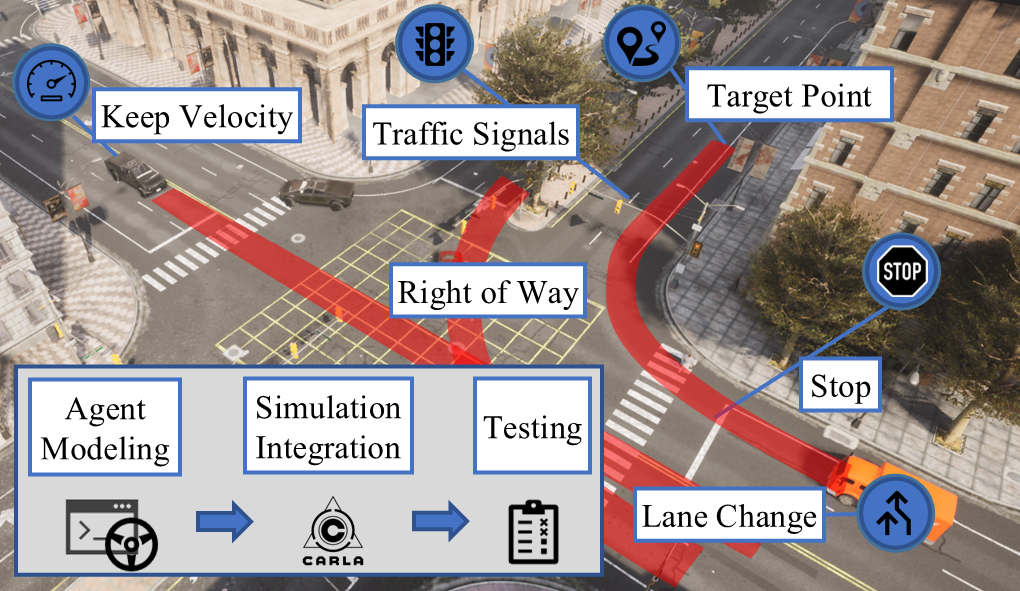
Figure 1: Intersection scenario in CARLA involving multiple coordinated agent behaviors as a demonstration of cross-tool model integration, scenario execution, and closed-loop consistency.
Interoperability, Portability, and Numerical Results
The architecture is evaluated against five stringent simulation requirements: standards compliance, portability/reusability, minimal integration effort, output consistency, and scalability.
Notable quantitative results:
- Behavioral Consistency: Across OpenPASS, CARLA, and CarMaker, the agent exhibits functionally identical behaviors for maneuvers such as following, lane changes, and speed adjustment; key metrics (e.g., time headway, acceleration profiles, lateral deviation) all remain within narrow, parameter-determined bands.
- Scalability: In OpenPASS, parallel instantiation of 20 agent FMUs exhibits strictly linear scaling in memory (~7.5 MB/agent) and computational runtime, with real-time factors surpassing 30x for single-agent simulation and remaining stable as agent counts grow (see Figure 4).
- Minimal Integration Effort: Once basic OSI and FMI support exists in a simulator, agent model insertion requires no custom code, only scenario and parameter configuration. Automated test suites validate reproducibility across toolchains.

Figure 5: Multi-agent intersection in OpenPASS with 20 independently controlled agents, demonstrating tool-agnostic agent integration at scale, rule compliance, and collision avoidance.
Implications and Future Directions
This methodology robustly decouples agent model development from simulation backend, effectively addressing fragmentation and enabling repeatable, scenario-based testing workflows. The adherence to OSI and FMI standards also facilitates future extensions to sensor and actuation models, supporting holistic, domain-aligned simulation development.
Key implications include:
- Practical Interoperability: Researchers and industry stakeholders can now share agent models and test scenarios without concern for tool dependencies, significantly streamlining validation pipelines within OEM, supplier, and regulatory contexts.
- Enhanced Reproducibility: Identical agent FMUs can be deployed in different simulators, sustaining behavioral consistency and enabling meaningful cross-validation studies.
- Scalable Multi-Agent Experiments: With linear computational scaling, large-scale, closed-loop scenario studies—such as dense traffic, intersection negotiation, or rare-event safety validation—are now practically realizable.
- Open Research Infrastructure: The public reference implementation and test catalog accelerate collaborative development and benchmarking for the wider AV and simulation research communities.
Looking ahead, this architecture paves the way for tighter CI/CD integration, the introduction of learned or hybrid agent models, and extension to full digital twins containing heterogeneous agent populations, advanced sensors, and actuated subsystems. Broader adoption could catalyze harmonization across the simulation industry, fostering common benchmarks and accelerating safety-critical AV deployment.
Conclusion
By synergizing OSI and FMI under the OSMP paradigm, this work establishes a highly interoperable, modular, and standards-compliant pipeline for agent model integration in scenario-based automated driving simulation. The approach has been concretely validated across leading simulation tools, delivering robust behavioral consistency, scalability, and minimal integration overhead. The openly available reference implementation and scenario suite set a strong foundation for reproducible, collaborative AV safety research and future AI-augmented simulation development.