- The paper establishes analytic conditions for approximate LDP using sparse discrete-Laplace and Gaussian mechanisms.
- It demonstrates that mechanism-level sparsity minimizes distortion while balancing privacy defects through careful support-size calibration.
- Explicit tradeoffs between support size, privacy loss, and utility are derived via numerical evaluations and analytic formulas.
Sparse Discrete Laplace and Gaussian Mechanisms under Local Differential Privacy
Mechanism-Level Sparsity in Locally Private Channels
The paper "Sparse Discrete Laplace and Gaussian Mechanisms under Local Differential Privacy" (2605.09561) introduces a rigorous characterization of sparse support mechanisms for local differential privacy (LDP). It focuses on two canonical families: sparse discrete-Laplace channels and sparse Gaussian channels. The mechanisms are defined by kernels—Laplace (w(x,y)=e−λd(x,y)) and Gaussian (w(x,y)=e−d(x,y)2/(2σ2))—and restrict outputs to input-dependent sets S(x) whose cardinality s is small relative to the ambient output alphabet.
The authors identify the support size as the central complexity parameter for locally private mechanisms, demonstrating that approximate (ε,δ)-LDP admits a natural decomposition of privacy defect into support leakage and overlap excess-loss. Explicit tradeoffs between privacy and utility (distortion) are derived as a function of s for both mechanism families, and analytic conditions for both pure and approximate LDP are established.
Privacy Characterization and Feasibility
Exact conditions for pure ε-LDP are established: pure privacy is only achievable when all input-dependent support sets coincide (S(x)=S(x′)), ruling out genuine mechanism sparsity in the pure regime. This is formalized by requiring finiteness of the privacy-loss function across all supports and inputs. In approximate (ε,δ)-LDP, sparsity acquires operational significance, with the privacy defect split into two interpretable parts: the support-leakage term (outputs available only for some inputs, costed against δ), and the overlap excess-loss term (regions where the privacy loss exceeds w(x,y)=e−d(x,y)2/(2σ2)0).
Radius-truncated versions of both mechanism families are studied, with w(x,y)=e−d(x,y)2/(2σ2)1 defined as the set of outputs within radius w(x,y)=e−d(x,y)2/(2σ2)2 of w(x,y)=e−d(x,y)2/(2σ2)3. The minimal overlap required for approximate privacy is established: nontrivial privacy requires w(x,y)=e−d(x,y)2/(2σ2)4, where w(x,y)=e−d(x,y)2/(2σ2)5 is the privacy range. For input pairs with separation exceeding w(x,y)=e−d(x,y)2/(2σ2)6, the privacy defect reaches unity, indicating complete leakage.
Explicit Privacy-Utility Tradeoffs
For the discrete-Laplace mechanism, privacy feasibility reduces to w(x,y)=e−d(x,y)2/(2σ2)7, and distortion (expected error) increases monotonically with w(x,y)=e−d(x,y)2/(2σ2)8. Analytic formulas relate w(x,y)=e−d(x,y)2/(2σ2)9-LDP feasibility to mechanism parameters and support size, yielding clean design rules. The distortion-optimal sparse-support mechanism is always the smallest S(x)0 compatible with privacy. A similar structure holds for the Gaussian mechanism, although privacy defect exhibits a sharper dependence on support radius due to quadratic overlap losses.
Laplace offers a privacy-loss bound linear in radius; Gaussian overlap loss grows quadratically. Thus, in the Gaussian case, increasing support size sharply enhances distortion while only slowly diminishing privacy defect, requiring careful two-parameter calibration.
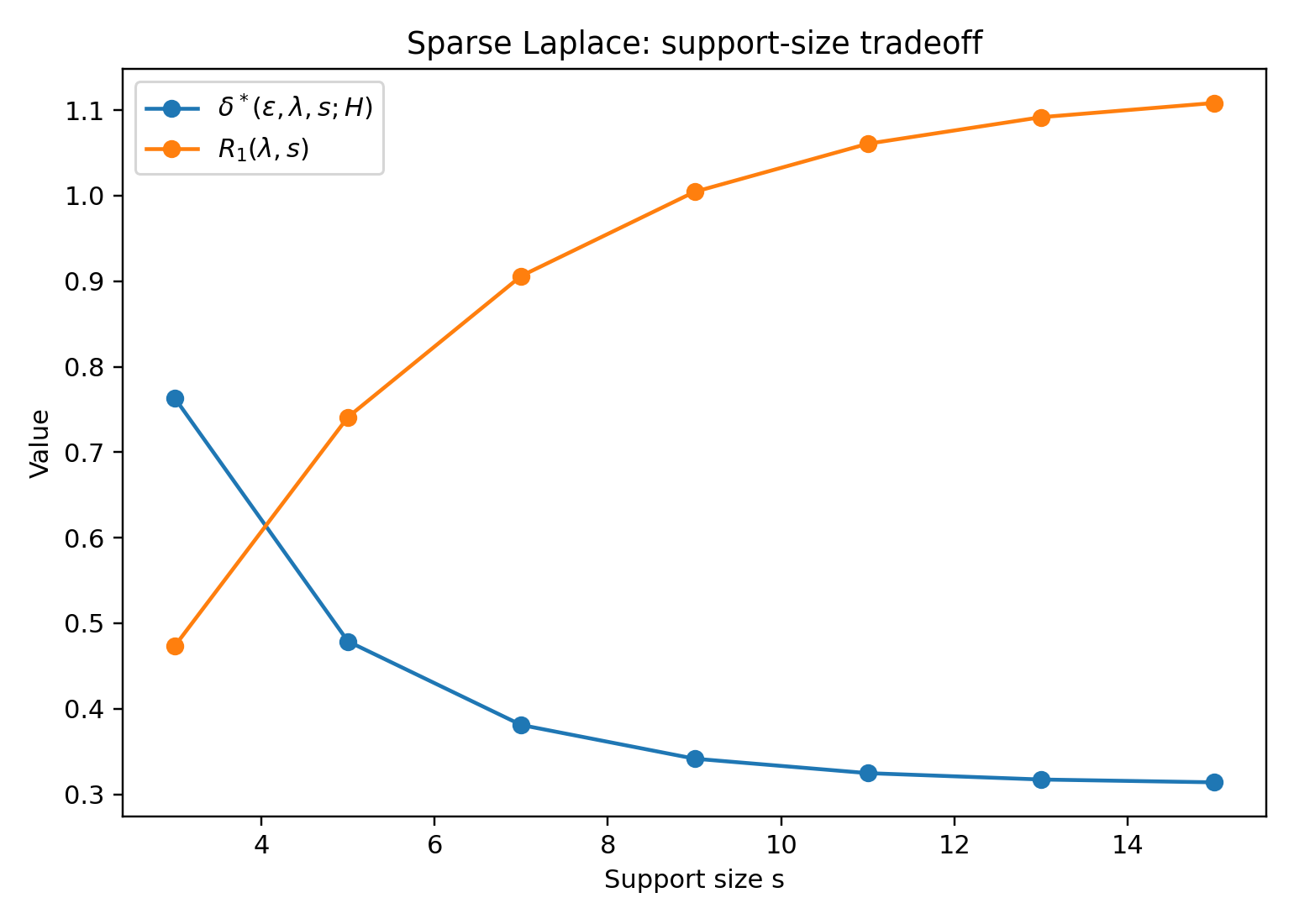
Figure 1: Laplace support-size tradeoff for S(x)1. The exact privacy defect decreases with S(x)2, while the first distortion moment increases.
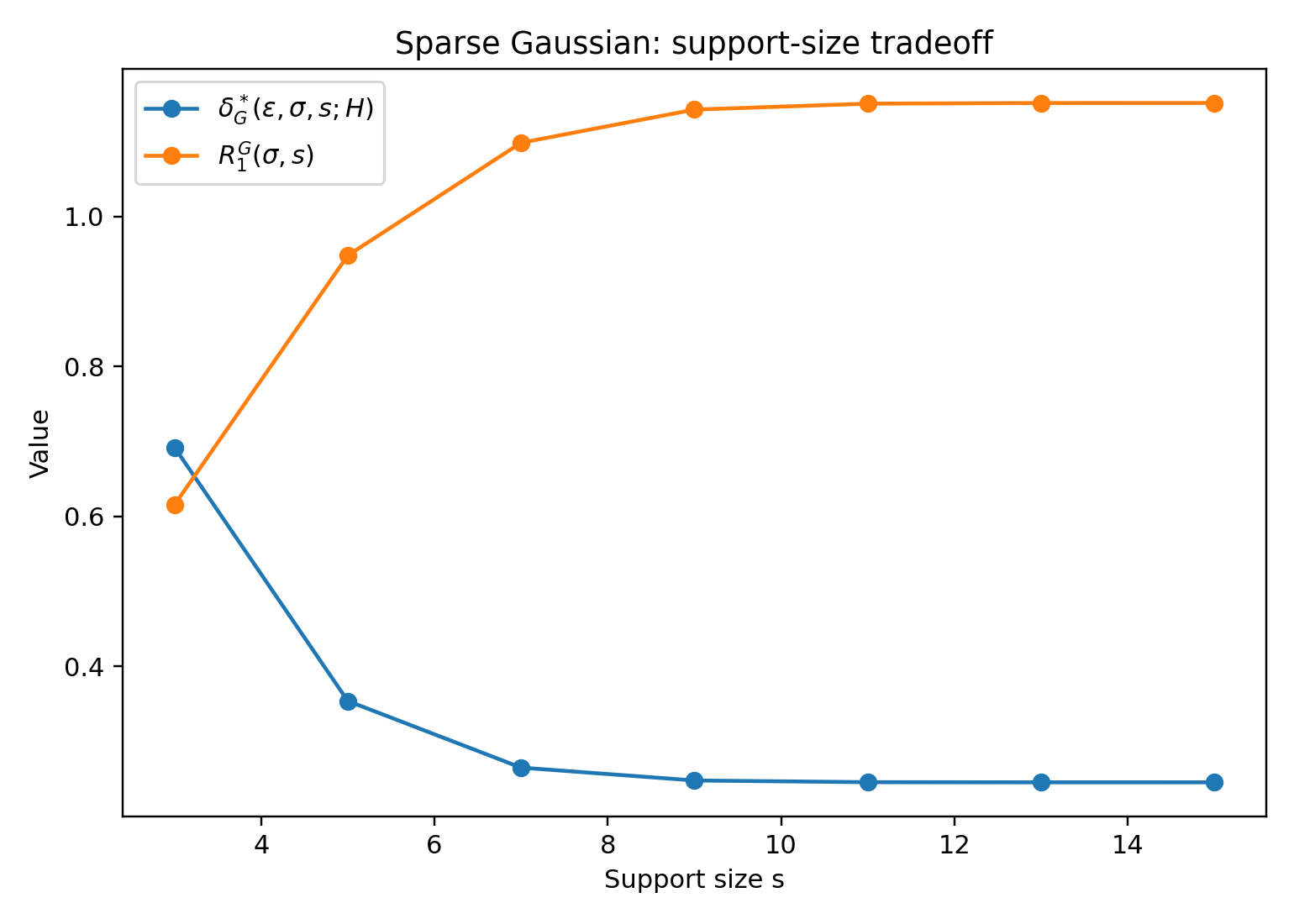
Figure 2: Gaussian support-size tradeoff for S(x)3. The same privacy–distortion tension appears, but privacy decreases more slowly with S(x)4 than in the Laplace case.
Parameter Sweeps and Design Principles
Numerical evaluations demonstrate strong, quantitative privacy–utility tensions. At fixed sparsity, increasing the concentration parameter (S(x)5 or S(x)6) reduces distortion but can degrade privacy, with privacy defect often exhibiting non-monotonic behavior and internal minima. For Laplace, privacy defect is minimized at an intermediate S(x)7, for Gaussian, at moderate S(x)8, reinforcing the two-dimensional nature of mechanism design.
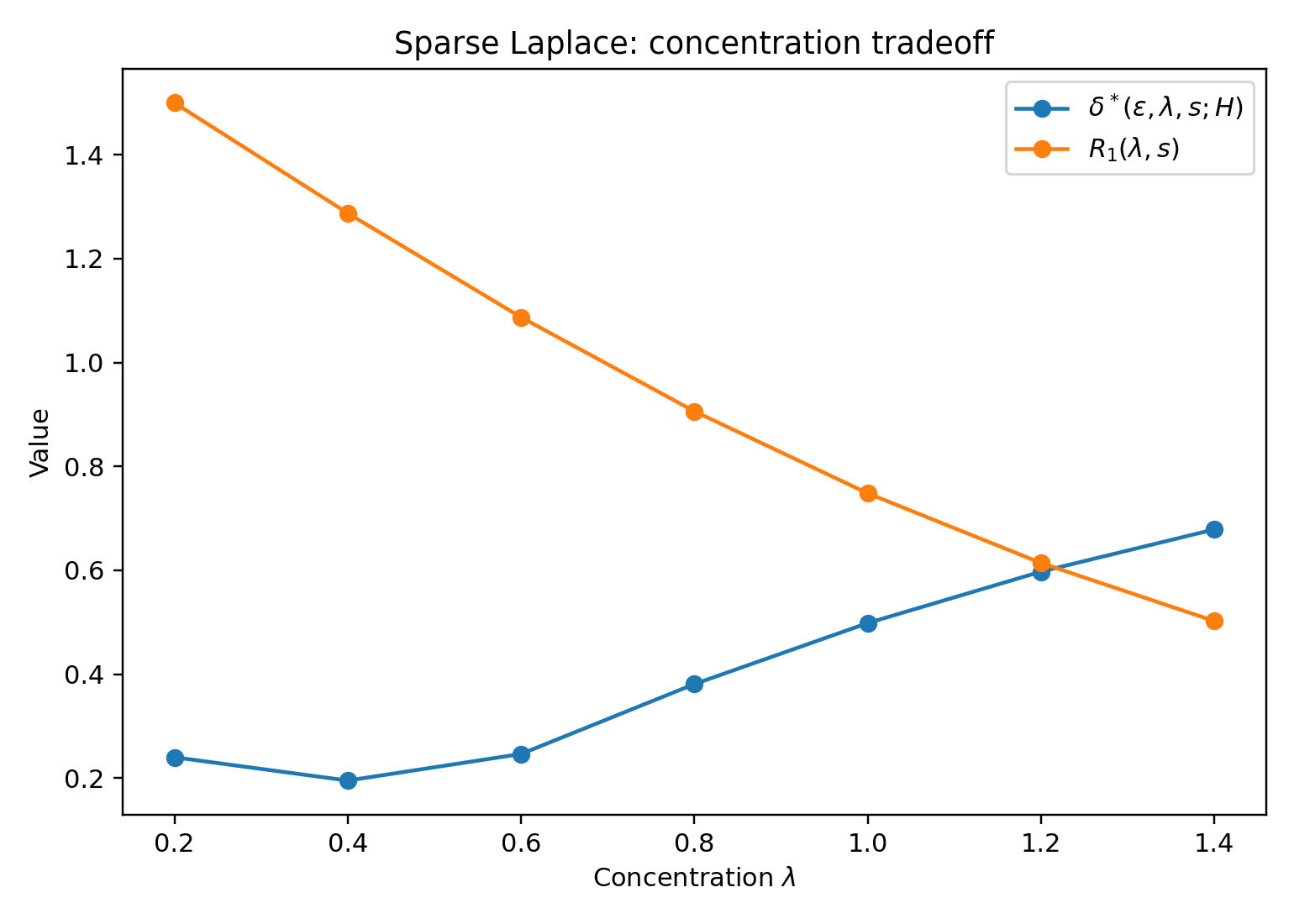
Figure 3: Laplace concentration sweep. At fixed sparsity, increasing S(x)9 improves utility but can worsen privacy after a point.
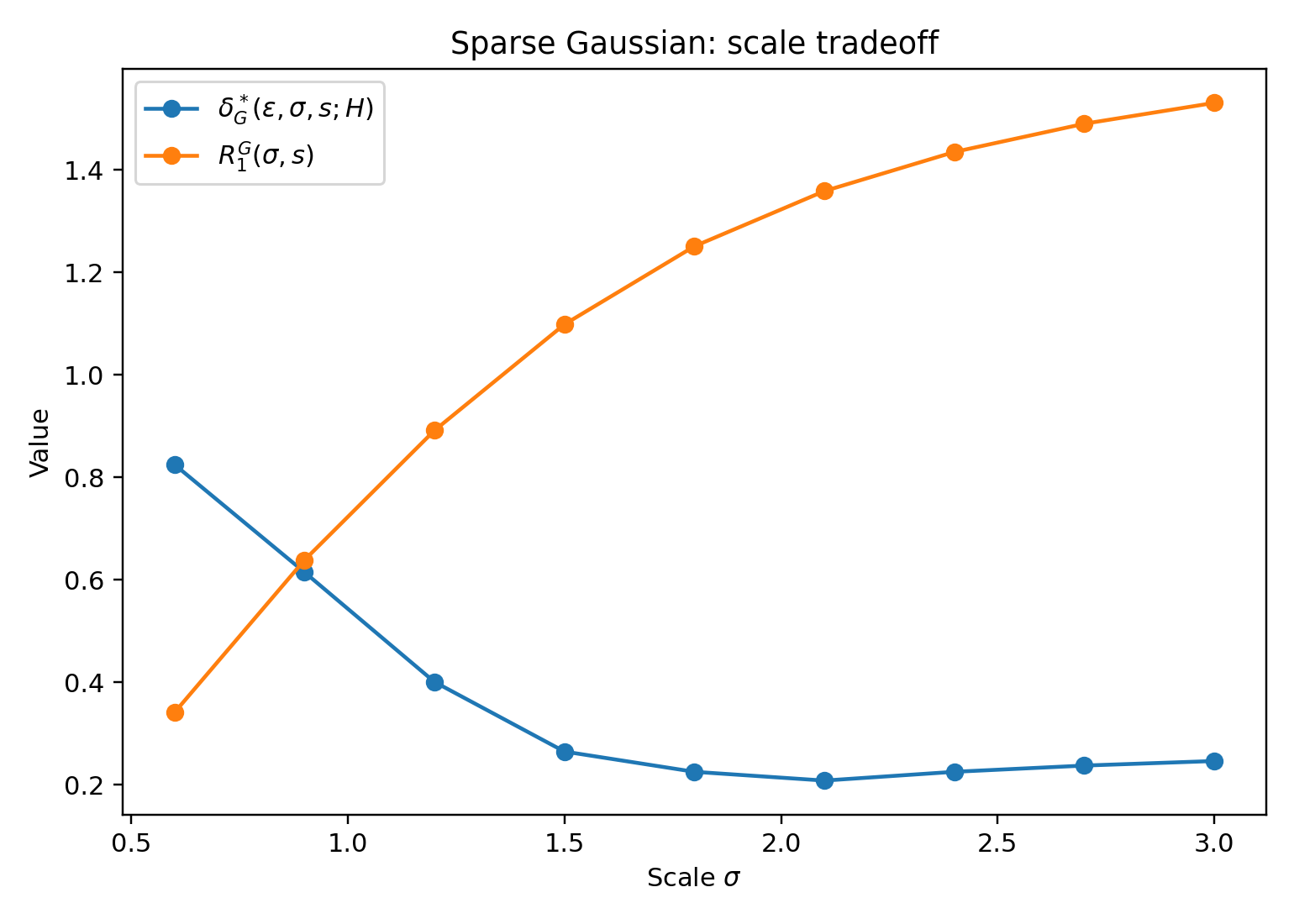
Figure 4: Gaussian scale sweep. The privacy defect exhibits an interior minimizer, highlighting the two-parameter design nature of the Gaussian family.
The analyses establish that support size alone does not determine optimal privacy–utility tradeoffs. Within feasible regions, joint tuning of support size and kernel parameter is essential.
Implications and Design Recommendations
The results have both theoretical and practical implications. They motivate the use of mechanism-level sparsity as a tool for controlling distortion in local privacy settings, expanding beyond classical mechanisms like randomized response or globally supported noise. For mechanism designers, size of support is the fundamental knob to balance privacy and utility: the privacy constraint yields a lower bound on s0, and distortion is minimized by saturating this bound.
For approximate privacy, sparsity is not merely permissible—it is theoretically optimal with respect to distortion. The findings also demonstrate that the Gaussian mechanism is not simply a substitute for Laplace: its sharper radius interaction necessitates joint optimization for privacy and utility.
These mechanisms are relevant in practical statistical systems (sparse, finite-support perturbation, e.g., [Sadeghi_Chien_2024]), and the principle of smallest feasible support applies directly in real-world privacy-preserving data releases. In future mechanism design, further variations of kernel type, adaptive support sets, and utility objectives may yield refined tradeoffs and tighter optimality results.
Conclusion
This paper rigorously characterizes sparse locally private channels, demonstrating that the support cardinality is fundamental to privacy–distortion tradeoffs for both discrete-Laplace and Gaussian mechanism families. Pure privacy requires coinciding supports, while approximate privacy allows—and optimally exploits—mechanism-level sparsity. Design principles favor the minimum feasible support size for distortion minimization, and explicit analytic conditions are provided for both families. The results contribute substantial new insights to LDP mechanism design, with direct applicability to discrete estimation and practical disclosure systems.

