- The paper introduces a unified curvature framework that extends greedy guarantees beyond non-negative, monotone submodular functions by measuring deviation from linearity.
- It presents a greedy with pruning algorithm achieving a (1-e^{-c_g})/c_g approximation ratio, with trajectory-specific certificates even for negative-valued functions.
- Empirical studies in feature selection, sensor placement, and summarization confirm robust, instance-specific performance improvements over classical approaches.
Curvature-Controlled Greedy Guarantees for Arbitrary Submodular Functions
Introduction and Motivation
The paper "Curvature Beyond Positivity: Greedy Guarantees for Arbitrary Submodular Functions" (2605.07902) rigorously extends the classical theory of submodular optimization by introducing a curvature framework applicable to arbitrary submodular functions, including those that are not monotone and that may take negative values. Traditional greedy approximations, particularly (1−1/e), are limited to monotone, non-negative objectives; however, in practical machine learning applications, cost-penalized objectives often violate these conditions. Existing approaches have only addressed negativity or non-monotonicity separately, failing to unify the two within a structural framework. This work answers the open question of whether curvature—a measure of deviation from linearity—can be extended to general submodular functions to yield tractable, instance-specific, multiplicative guarantees.
Curvature Framework: Definitions and Structural Characterization
Curvature for a monotone submodular function traditionally quantifies the maximum loss in marginal returns and bridges modularity and submodularity. The paper generalizes curvature to arbitrary submodular functions by defining a set-wise curvature cf: cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)
(restricted to pairs where f(Y∖X)>0).
Monotonicity is precisely characterized by cf≤1, and curvature further partitions the function space—functions with cf>1 are inherently non-monotone. Crucially, the paper defines a trajectory-specific greedy curvature cg, capturing the minimum ratio along the greedy+pruning trajectory, allowing tighter, instance-dependent guarantees.
The structural implications are significant: curvature simultaneously measures deviation from linearity and distance from monotonicity, providing a unified parameter for submodular maximization in the presence of negative values and non-monotone effects.
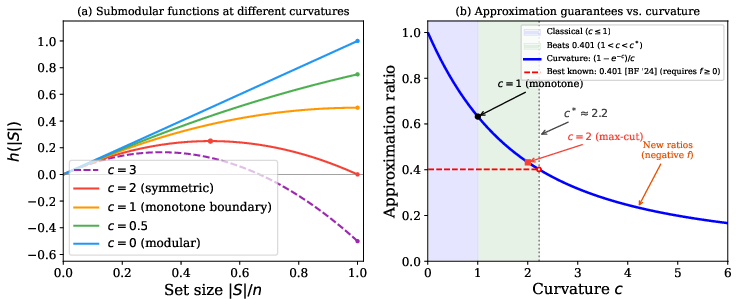
Figure 1: Curvature spectrum: module (c=0), low curvature (c=0.5), monotone boundary (c=1), symmetric (cf0), and beyond (cf1); corresponding approximation guarantees as functions of curvature parameter cf2.
Greedy with Pruning: Curvature-Controlled Multiplicative Guarantees
The cornerstone algorithm is greedy with pruning: after each greedy addition (element with highest marginal gain), elements whose marginal contribution to the current set becomes non-positive are removed. This pruning loop ensures local monotonicity within the active set—each remaining element has strictly positive marginal, enabling the use of curvature inequalities.
The main theorem establishes that greedy with pruning achieves a cf3 approximation ratio for any submodular function, where cf4. For monotone instances, the guarantee collapses to the classical formula. In the regime cf5, the bound exceeds the best known uniform ratio for non-negative non-monotone functions.
This guarantee is tight with respect to the trajectory curvature and provable post-hoc via empirical or certificate-based diagnostics. Notably, the guarantee holds for arbitrary negative-valued instances, representing the first multiplicative bound for this setting.
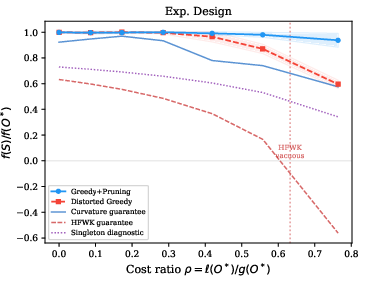
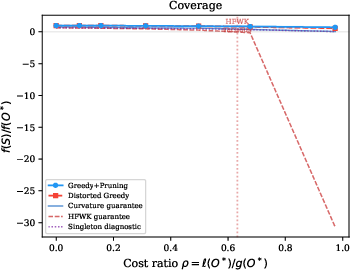
Figure 2: Tier 1 cost sweeps: empirical ratios and theoretical guarantees; greedy+pruning (GP) is competitive or superior at high costs, with curvature guarantees remaining positive as additive bounds go negative.
Lifting to General Constraints: DMCG-P and Multilinear Trajectory Curvature
To extend the framework beyond cardinaility constraints, the paper introduces DMCG-P (Discretized Measured Continuous Greedy with Pruning), leveraging multilinear extension but restricting curvature measurement to the algorithm's trajectory. Classical multilinear curvature diverges for negative-valued functions due to problematic concentration witnesses; DMCG-P circumvents this by maintaining a positive-slope invariant via pruning.
Theoretical guarantees extend as follows: for trajectory-restricted fractional curvature cf6 (finite via certificate), DMCG-P achieves cf7 approximation (upto discretization error cf8), where cf9 is the multilinear smoothness constant and cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)0 the number of steps. The guarantee is realizable for decomposable functions (cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)1) and certified post-hoc by removal-slope or removal-marginal ratios observed along the trajectory.
Empirical Validation: Experimental Design, Coverage, Feature Selection, and Diversity
Extensive experiments validate the theoretical results on cost-penalized Bayesian experimental design, coverage, and feature selection, as well as passage selection for summarization. Empirical ratios are consistently high relative to theoretical curvature guarantees, which are conservative. At high curvature (cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)2), the guarantee is cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)3 against an observed cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)4.
In moderate-scale settings, exact optimality is infeasible; however, singleton-based curvature diagnostics remain positive across the cost sweep, while additive bounds become vacuous. The removal-marginal and trajectory curvature certificates are shown to provide informative instance-specific guarantees.
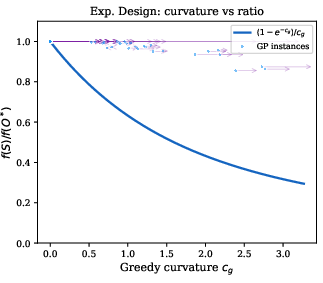
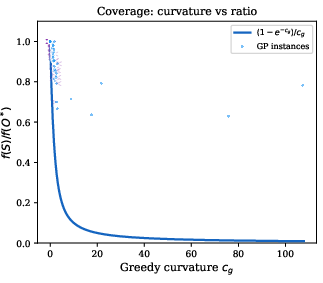
Figure 3: Curvature vs observed ratios: each dot is a (curvature, ratio) pair; the theoretical guarantee curve is conservative, aligning in trend but lying below empirical ratios.
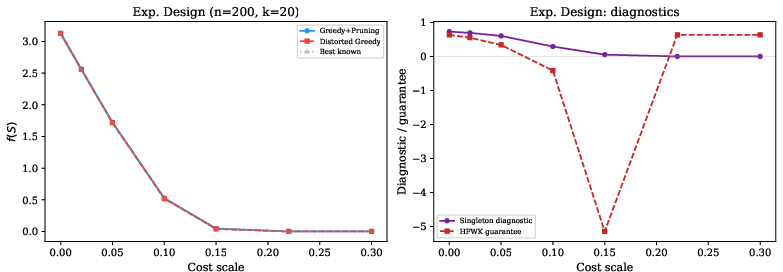
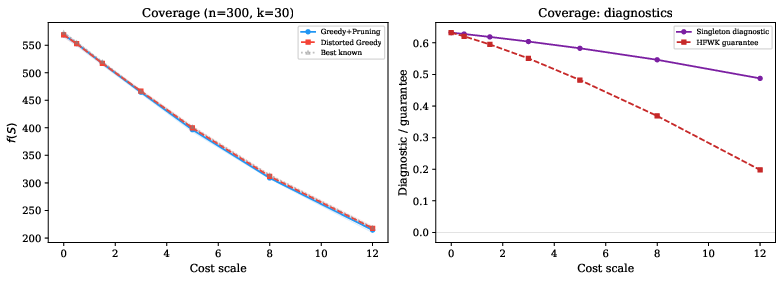
Figure 4: Moderate-scale experiments: GP matches or exceeds DG, singleton curvature diagnostics remain positive even at extreme cost levels.
For symmetric submodular functions (e.g., MaxCut), curvature subsumes specialized results (cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)5 yields the classical cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)6 ratio), and the greedy+pruning algorithm empirically improves over standard greedy at large budgets. For graph-cut-linear (GCLin) diversity objectives in document summarization, curvature is shown to follow the expected trajectory (cf=1−X,Yminf(Y∖X)f(X∪Y)−f(X)7), and per-instance certificates are consistently tighter than uniform analytic bounds, even when partial-monotonicity guarantees vanish.
Implications and Future Directions
This framework structurally unifies cost-negation and non-monotonicity in submodular maximization, providing the first trajectory-specific curvature-controlled multiplicative guarantees for negative-valued objectives. Practically, it advances robust certificate-based guarantees for greedy algorithms in regularized feature selection, cost-sensitive sensor placement, and passage selection for LLMs.
Theoretically, curvature bridges classical CC theory and modern multilinear relaxations. The key limitation is trajectory specificity: curvature is certified post-hoc, not known a priori. Open avenues include threshold/streaming variants preserving pruning invariants, tight value-oracle lower bounds, and adaptivity mechanisms leveraging real-time curvature diagnostics.
Conclusion
This paper generalizes curvature as the canonical structural parameter for submodular maximization and establishes tight, multiplicative greedy guarantees for arbitrary functions, including negative and non-monotone objectives. By combining structural theory and practical certificate design, it advances both the theoretical landscape and real-world applicability of submodular optimization in machine learning and combinatorial selection problems.

