- The paper presents a bi-level optimization framework that systematically plans jump sequences for rope-assisted legged robots, integrating CEM-based contact scheduling with nonlinear trajectory generation.
- The paper details how terrain modeling and cost maps identify optimal landing patches, ensuring dynamic feasibility under hardware-specific constraints.
- The paper demonstrates robust simulation performance across diverse terrains, highlighting adaptability and potential for real-world field robotics applications.
Introduction
Climbing tasks on steep or vertical surfaces pose substantial challenges for mobile robots due to the complex dynamics of rope-assisted locomotion, underactuation constraints, and nontrivial terrain morphology. This paper presents a computational framework for ALPINE, a rope-assisted legged climbing robot, that integrates bi-level mixed-integer optimization. The method systematically plans jump sequences by discretizing terrain into candidate landing patches, optimizing the number and location of jumps, and generating dynamically feasible trajectories with hardware constraints. Unlike prior approaches, which either focus solely on rope effects or use template models, the presented planning pipeline simultaneously considers terrain morphology, hardware-specific rope and leg actuation, and constraints arising from dynamic flight phases.
The ALPINE robot employs a prismatic leg for initiating jumps and two independently actuated ropes anchored to fixed points, enabling trajectory modulation during flight and stable landings. The system is underactuated; the kinematic model simplifies to 3-DOFs via holonomic constraint elimination under reasonable assumptions and retains the crucial nonlinear effects for planning purposes.
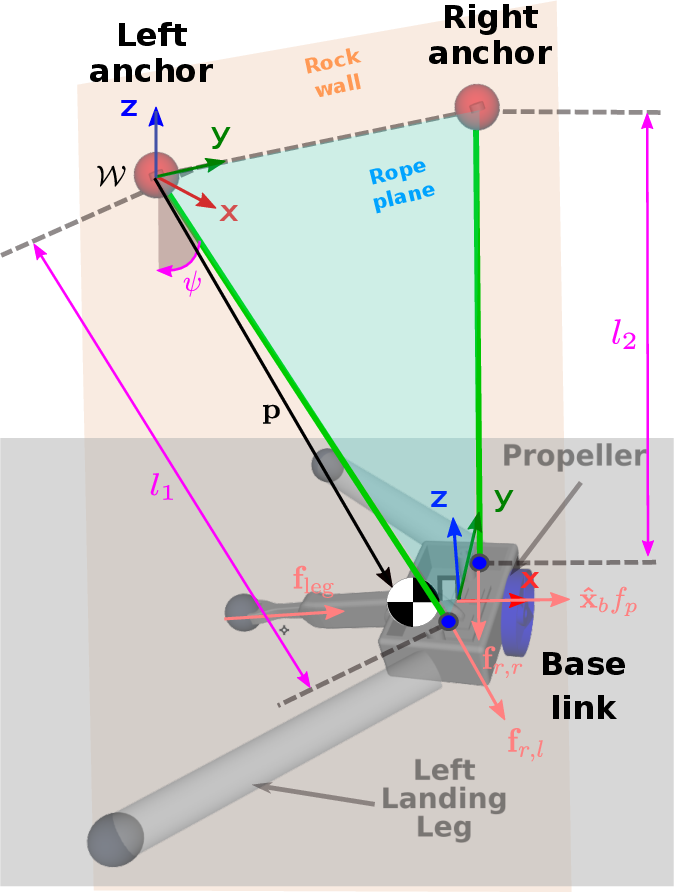
Figure 2: Kinematic model of the ALPINE robot, showing key actuation modalities (ropes, leg, propeller, landing legs) and their geometric relationships to fixed anchors.
Terrain modeling involves generating height maps, applying filtering kernels (e.g., slope, roughness, depth), and synthesizing a cost map that evaluates the feasibility and quality of footholds. Landing costs cl(Y,Z) are computed per cell using a weighted sum of morphological metrics, penalizing steep surfaces, abrupt curvature changes, and regions deep inside anchor verticals.
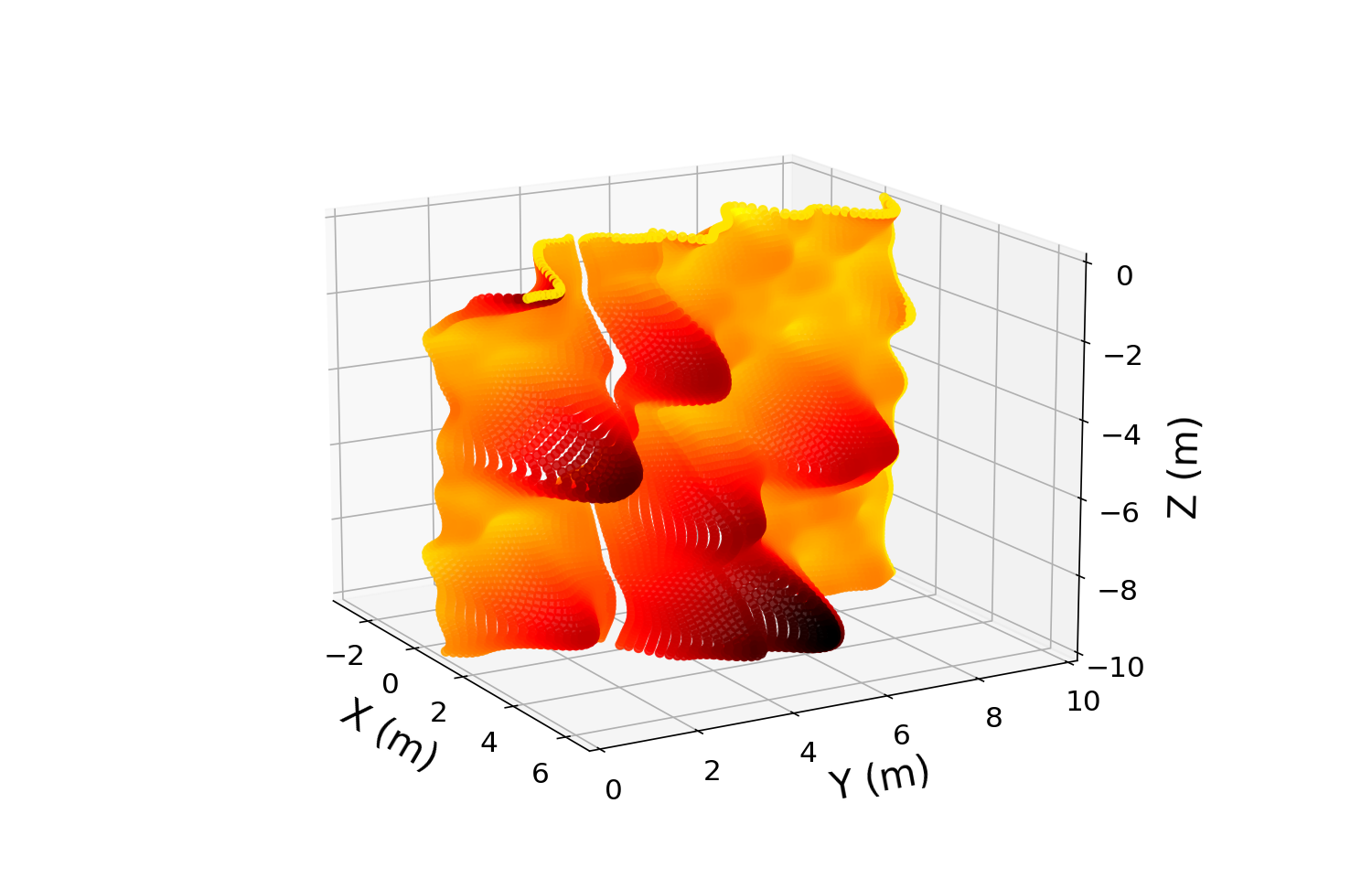
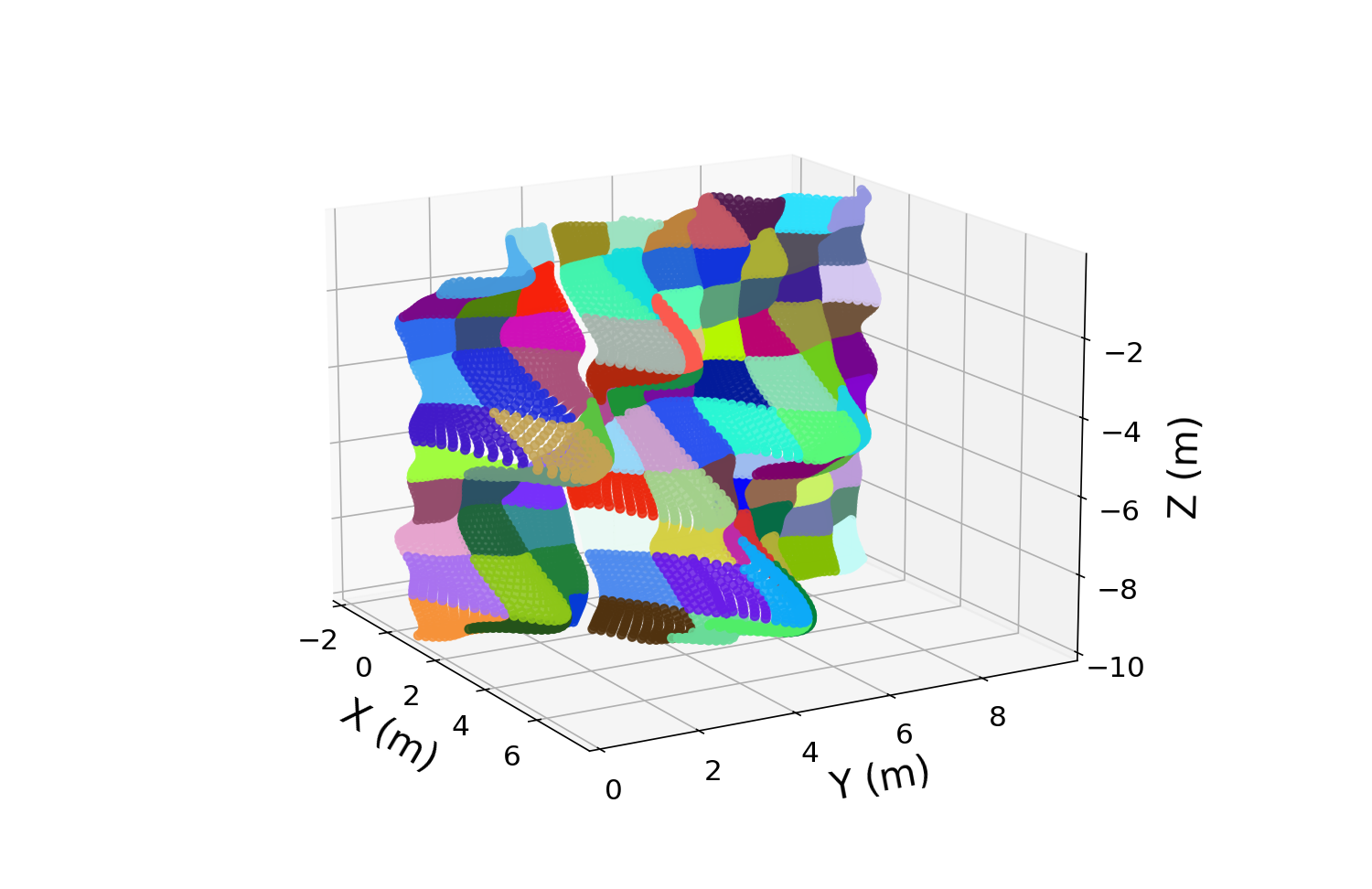
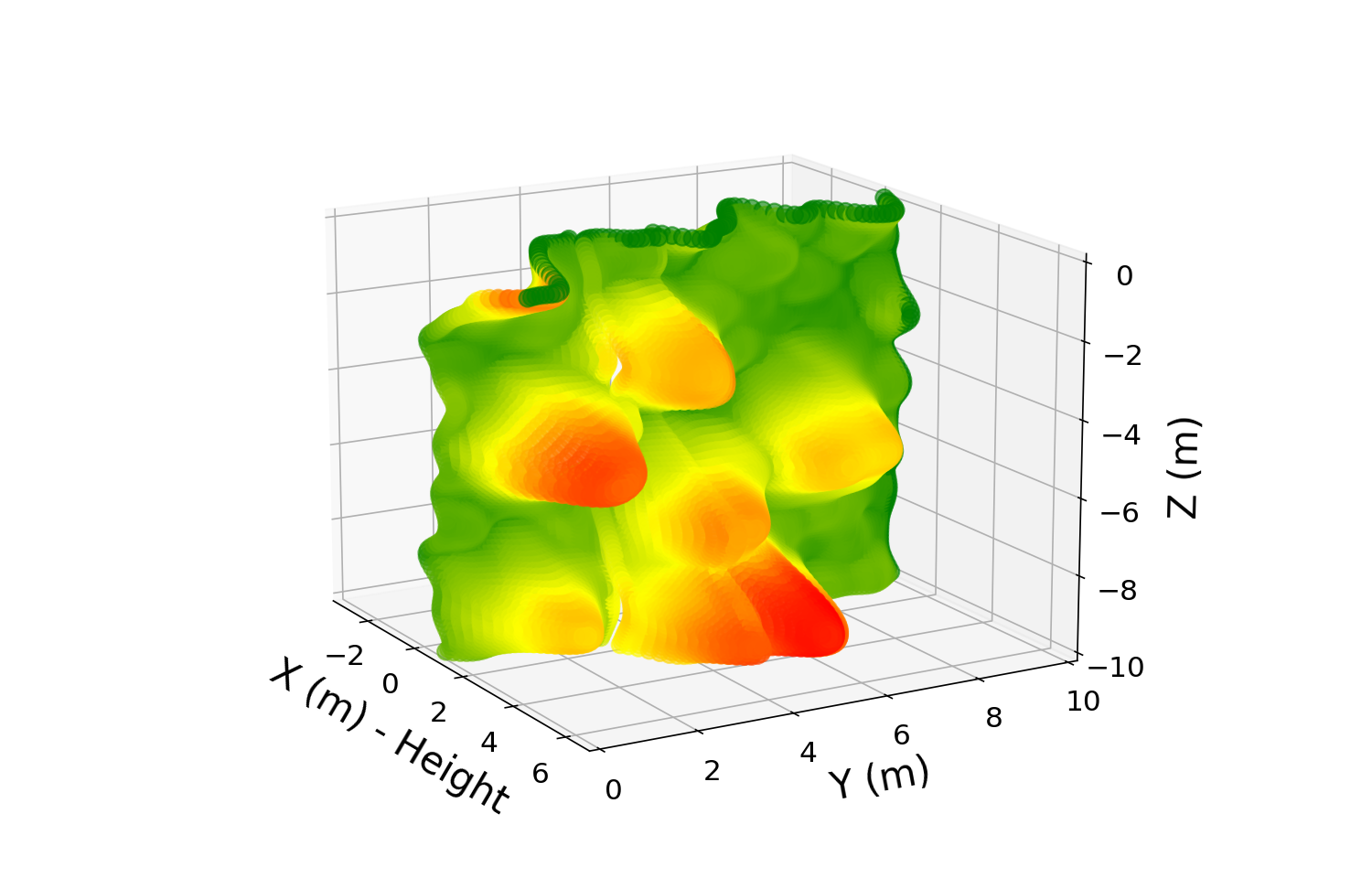
Figure 3: Height map used as input for cost map generation, facilitating foothold quality estimation and patch discretization.
Bi-Level Optimization Pipeline
The outer optimization loop employs the Cross-Entropy Method (CEM), a stochastic black-box optimizer suitable for non-differentiable and mixed-integer search spaces. This level samples candidate solutions specifying the number of jumps and the sequence of landing patches. The cost function aggregates average terrain costs of selected patches and penalizes infeasible solutions or loop trajectories through high penalty terms.
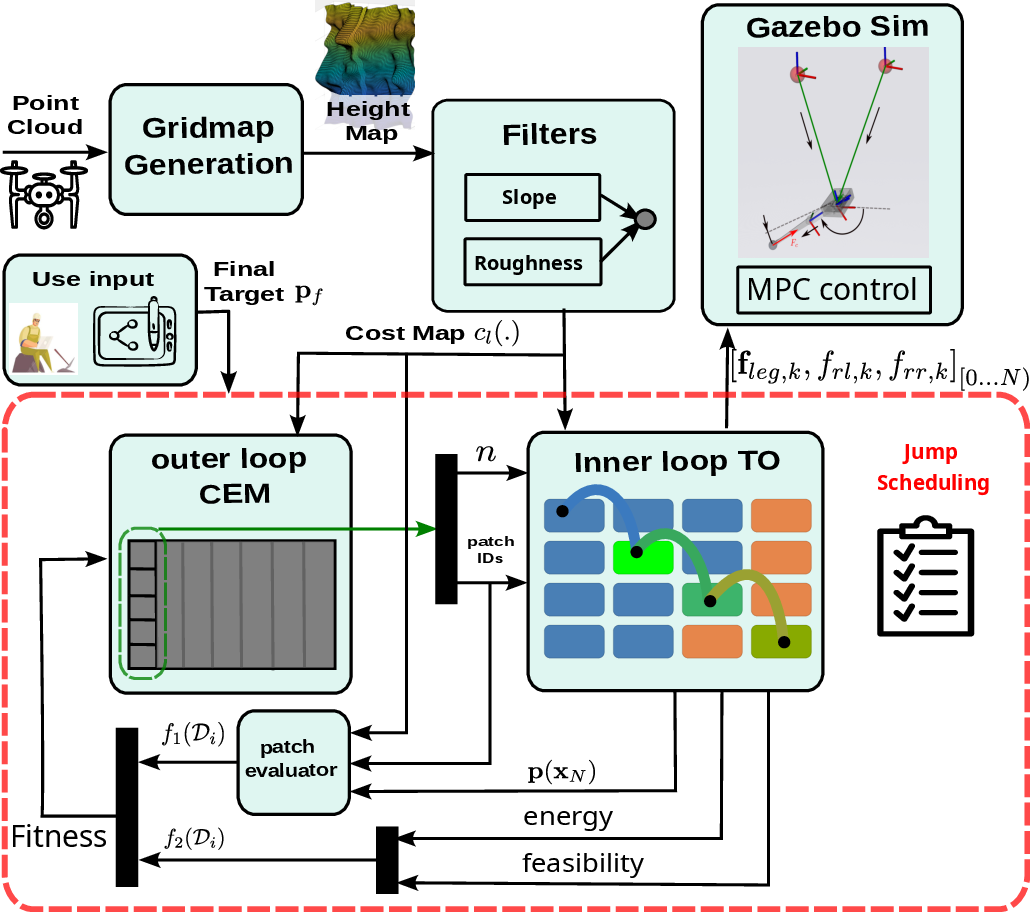
Figure 1: Block Diagram of the bi-level multi-jump optimization pipeline illustrating interaction between outer discrete planning and inner trajectory optimization.
Inner Level: Trajectory and Motion Planning
Given outer loop decisions, the inner optimization solves a nonlinear OCP for each jump segment, parameterized by rope forces, leg impulses, and jump duration. Path constraints enforce geometric feasibility relative to the terrain mesh (collision avoidance, clearance), actuation limits, and unilaterality of rope/leg forces. The landing point on each patch is further optimized within patch boundaries for minimum cost and mesh consistency.
The objective function incorporates rope force smoothing, hoist energy minimization, and landing cost, ensuring dynamically feasible solutions. The process leverages single shooting with RK4 discretization and direct integration of nonlinear dynamics.
Experimental Results
The framework was validated across three distinct terrain scenarios: hemispheric obstacles, multi-bulge terrains, and a realistic rocky wall simulation with Gazebo.
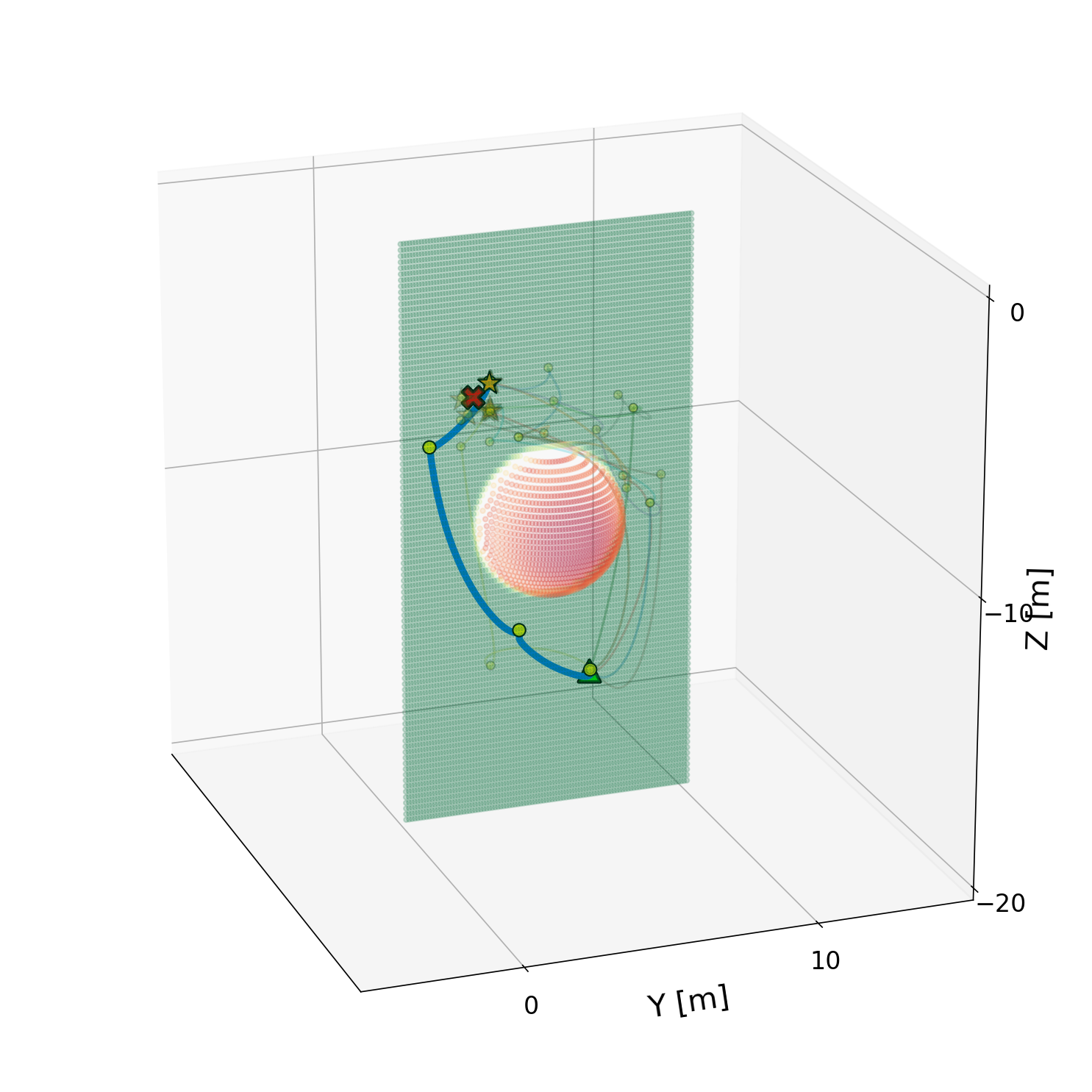
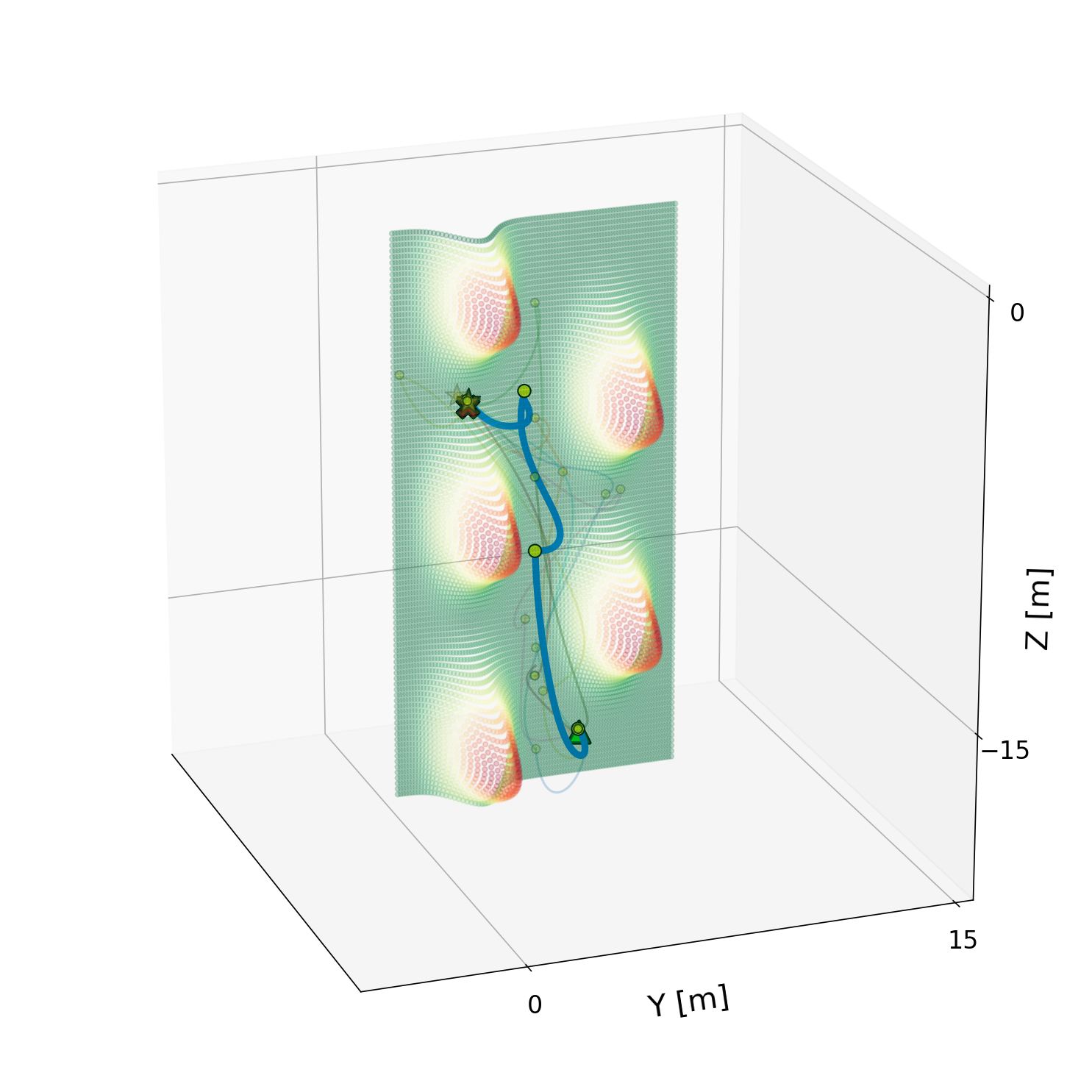
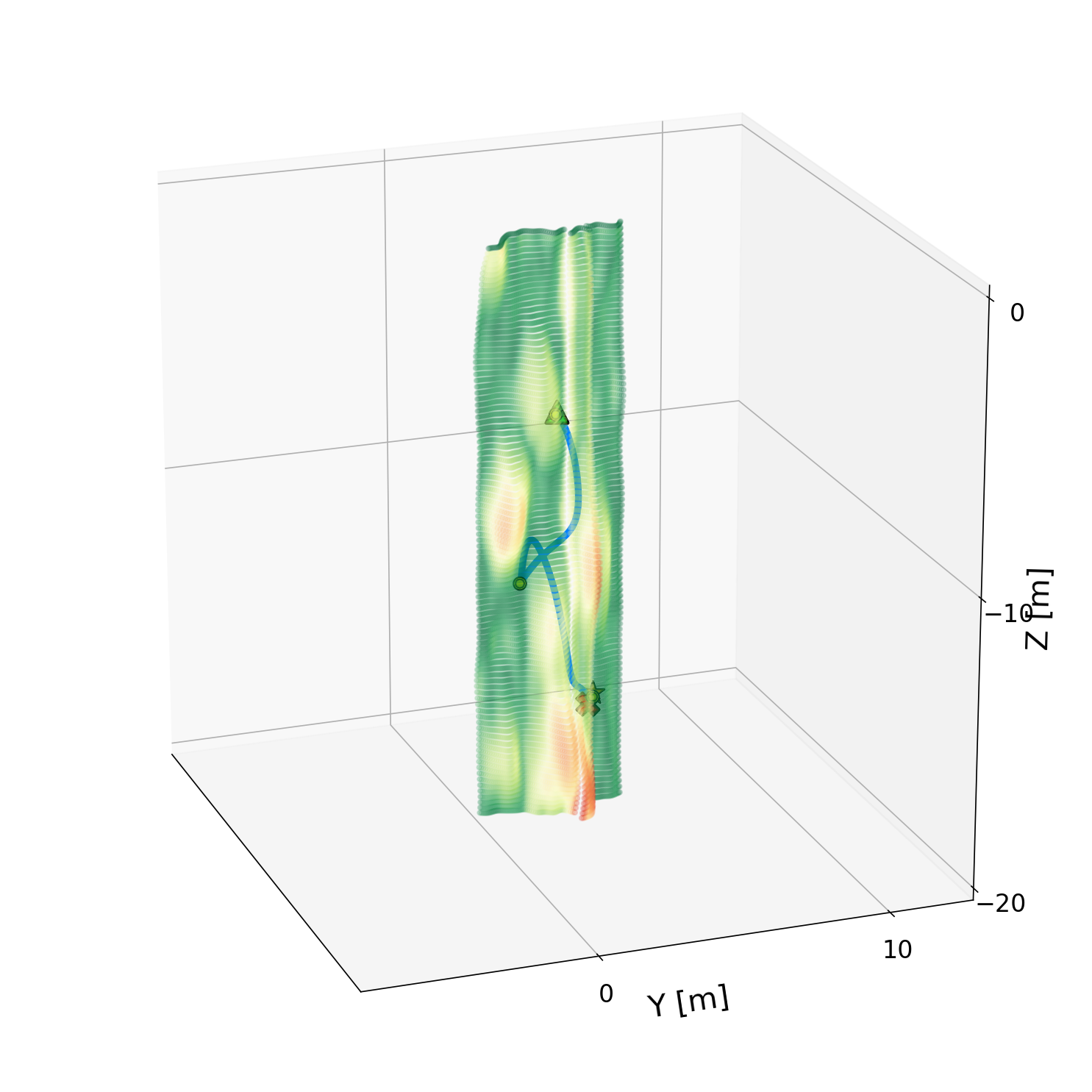
Figure 4: Hemispheric map depicting the planned jump trajectory with intermediate landing points (blue) to navigate around the obstacle.
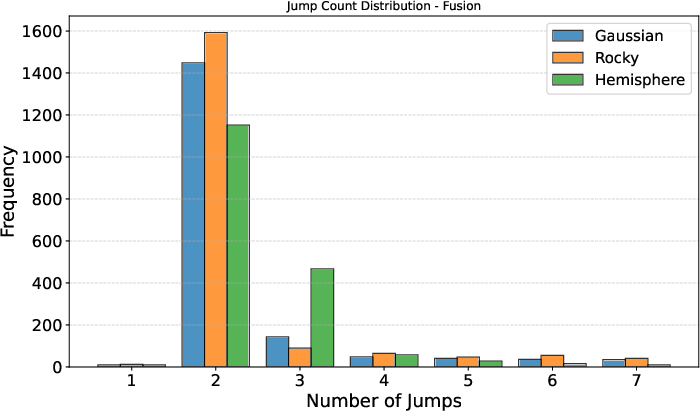
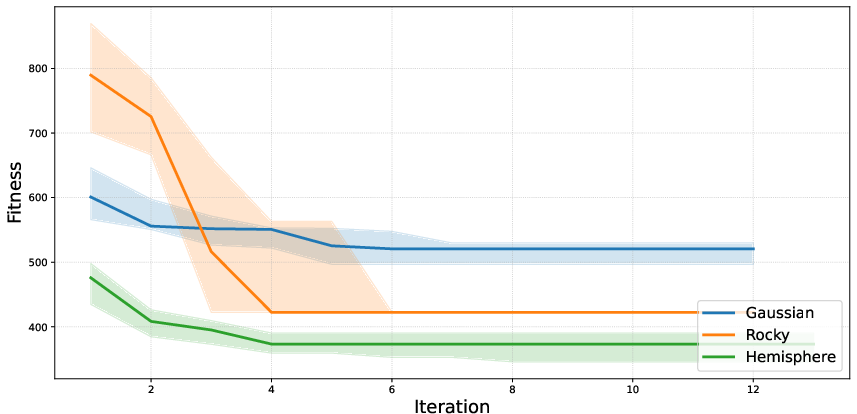
Figure 5: Combination jump selections and fitness convergence trends across all three terrain use cases, highlighting robust performance and solution exploration.
In the hemispheric obstacle scenario, multiple intermediate jumps were required to circumvent actuation limitations and avoid infeasible trajectories. In bulged pillar wall and rock-wall environments, the planner effectively avoided complex obstacle patterns and optimized the number of jumps, demonstrating adaptability to varying gravitational aids and hardware constraints. The fitness converged efficiently, with CEM population exploration regularized to prevent premature convergence. The trajectory optimization results were subsequently tracked in Gazebo via an MPC controller, compensating for model inaccuracies and disturbances using feedback control layered atop the planned rope and leg actuation profiles.
Discussion and Implications
The proposed bi-level optimization framework achieves simultaneous contact scheduling and motion planning for rope-assisted climbing robots, leveraging stochastic discrete optimization and nonlinear trajectory generation. The explicit terrain cost map and mesh constraints integrate environmental factors into the planning process, resulting in robust navigation across nontrivial surfaces. The method generalizes to other rope-assisted platforms by adapting the inner dynamic model, indicating substantial utility for field robotics in harsh, unstructured environments.
Key limitations include the lack of explicit cable-terrains interaction modeling (e.g., cable penetration), absence of onboard resource depletion tracking, and unmodeled controller tracking error in fitness evaluation. Addressing these, along with real hardware validation and integration of learned value functions, are identified as future research directions.
Conclusion
This paper introduces a comprehensive bi-level planning pipeline for rope-assisted legged robots, validated through simulation on challenging terrains. By integrating CEM-driven contact scheduling and nonlinear OCP-based trajectory optimization, the approach advances capabilities for climbing robots both in terms of discrete patch selection and continuous motion feasibility. The explicit terrain morphology and hardware-aware constraints ensure practical applicability, with future work directed toward cable-terrain interaction modeling and real-world deployment.