- The paper introduces GeoSearch, a robust framework that augments geolocalization with web-scale reverse image search and multimodal LMM inference.
- It employs a novel two-layer filtering mechanism combining image matching and confidence gating to effectively mitigate noise from open-world web evidence.
- Empirical results demonstrate significant accuracy improvements over baselines on benchmarks like Im2GPS3k and YFCC4k, confirming its state-of-the-art performance.
GeoSearch: Augmenting Worldwide Geolocalization with Web-Scale Reverse Image Search and Image Matching
Introduction
GeoSearch introduces a robust open-world image geolocalization framework that integrates web-scale reverse image search directly into a Retrieval-Augmented Generation (RAG) pipeline for global geocoordinate inference. By leveraging large multimodal models (LMMs) in conjunction with external web evidence and a novel two-layer filtering system, GeoSearch addresses long-standing limitations of prior closed-world methods, especially their inability to generalize to scenes unseen in static reference sets. The method demonstrates state-of-the-art performance under rigorous, leakage-aware evaluation on prominent benchmarks, marking a clear advance in adaptive geolocalization.
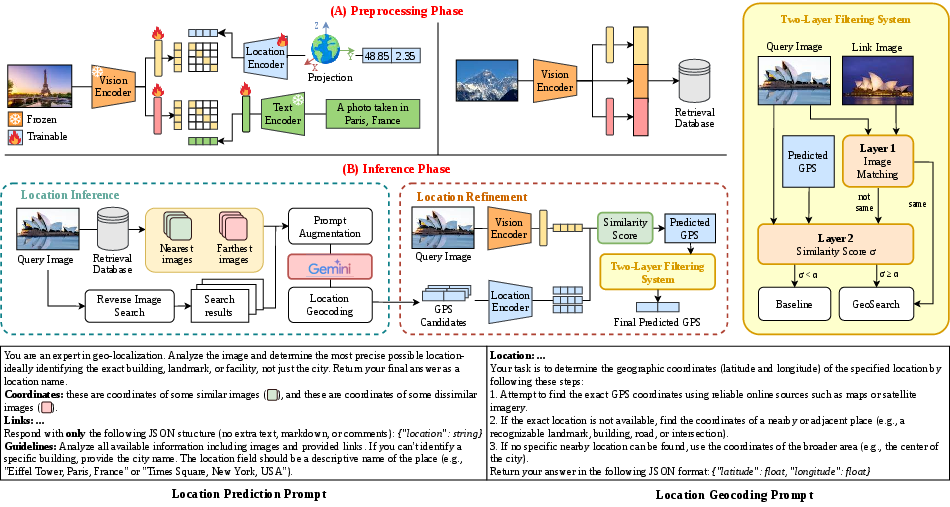
Figure 1: Overview of the GeoSearch framework.
Motivation and Problem Definition
Worldwide image geolocalization demands robust reasoning over heterogeneous scenes and is hindered by the global diversity of both natural and urban environments. Standard closed-world paradigms—classification, retrieval, generative—suffer significant performance drops when query content is not well-represented in the database. Prior RAG-based approaches, which combine retrieved candidates with LMM inference, inherit this limitation as they operate on fixed, typically curated, datasets. GeoSearch targets the open-world regime by supplementing database retrieval with web-scale visual evidence, extracting both geocoordinates and semantically rich contextual information from unrestricted sources.
Model Architecture and Methodology
Preprocessing and Representation Learning
GeoSearch's core design features three modality-specific encoders: image, text, and location. Visual input is processed with CLIP ViT-L/14, whose representations are projected into text-aligned and location-aligned embedding spaces. Text input is encoded with the CLIP text encoder and projected accordingly. GeoSearch departs from 2D projections by employing Earth-Centered, Earth-Fixed (ECEF) coordinates, representing each GPS pair as a continuous 3D Cartesian vector. This mitigates shape distortions and enables better global spatial modeling. Hierarchical random Fourier features are applied to the ECEF vectors, with multi-scale MLP aggregation for multi-resolution semantics.
Training leverages a symmetric InfoNCE loss to promote alignment between image, text, and location embeddings. Each reference image in the database stores a concatenation of raw and projected embeddings, ensuring high retrieval performance in hybrid space.
Inference Pipeline
At test time, GeoSearch retrieves both closed-world (database) and open-world (web) candidates:
- Closed-world retrieval: Queries the internal database for top-k nearest (and farthest) neighbors, yielding a candidate set of GPS coordinates.
- Open-world retrieval: Conducts web-scale reverse image search (e.g., via Google Lens), scraping geolocated textual evidence from top-ranked web pages.
To maximize diversity and coverage, LMM prompts are constructed by mixing variable numbers of database GPS references and web content excerpts. These prompts are input to an LMM (e.g., Gemini Flash 2.0) to produce rich location descriptions, which are then geocoded (using OpenStreetMap Nominatim with Gemini fallback) into candidate coordinates.
Location refinement proceeds by comparing image-to-location embedding similarity, selecting the top-scoring candidate.
Two-Layer Filtering
GeoSearch deploys an adaptive filtering mechanism to mitigate the high noise typical of web-scale content:
- Layer 1 (Image Matching): Employs SuperPoint and LightGlue to detect and match keypoints between the query and web-retrieved images. A RANSAC-based inlier criterion (M≥τm, ρ≥τin) validates geometric consistency. If the established thresholds are met, the web-augmented prediction is accepted as final output.
- Layer 2 (Confidence Gating): For cases with no reliable matches, the cosine similarity between the query image and predicted location embedding is computed. If the score exceeds a prescribed threshold (α), the web-augmented prediction is used; otherwise, GeoSearch reverts to the closed-world baseline. This dual-layer filter constrains error propagation from noisy, ambiguous, or off-topic web evidence.
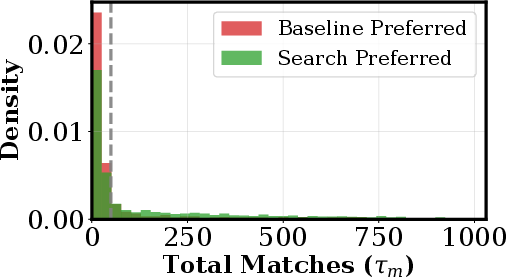
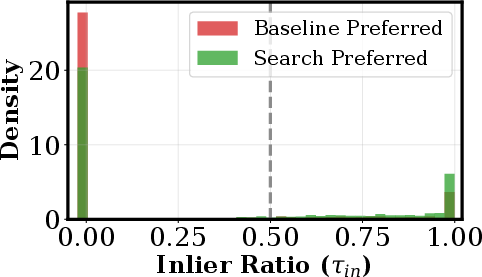
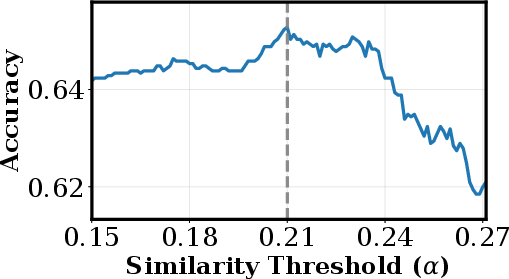
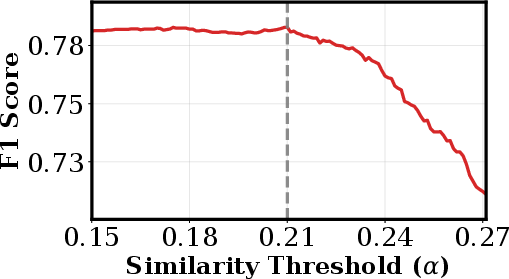
Figure 2: Filtering hyperparameter analysis on MP16-Search.
GeoSearch yields significant improvements at both fine- and coarse-grained geolocalization:
- On Im2GPS3k (OSV-5M), GeoSearch + GeoRanker attains 23.56% at 1 km and 89.59% at 2500 km, an absolute gain of over 4.8% at 1 km versus the strongest baseline.
- On YFCC4k, analogous gains are observed—GeoSearch + G3 achieves 17.53% at 1 km and 79.85% at 2500 km.
These results persist even when closed-world leakage advantages are removed, demonstrating superior robustness to incomplete reference corpora.
Ablation studies highlight the centrality of web augmentation (especially when closed-world references are weak), the efficacy of the two-stage LMM generation with geocoding, and the necessity of both image matching and confidence gating for filter reliability. The ECEF projection provides superior spatial alignment versus previous 2D projections, particularly in coarse localization.

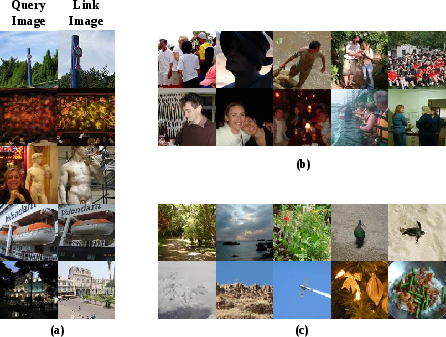
Figure 3: Geographic distributions of GPS galleries.
Qualitative Analysis and Failure Cases
GeoSearch outperforms previous methods in typical and challenging environments; however, several noteworthy failure cases emerge:
Efficiency and Practicality
The integration of web-scale reverse search and prompt augmentation in GeoSearch incurs increased computational cost, with average inference time increased compared to leading RAG-only methods. Token consumption during prompt construction and geocoding is also higher due to richer context and fallback mechanisms. Despite these costs, GeoSearch remains viable for large-scale deployment due to parallelizability and the ability to adapt search cost dynamically depending on confidence and filtering outcomes.
Theoretical and Practical Implications
GeoSearch demonstrates that augmenting visual geolocalization pipelines with web-scale, on-the-fly evidence, and integrating it with strong filtering and representation design, yields tangible gains in open-world settings. The success of ECEF-based encoding, hierarchical filtering, and LMM-driven prompt engineering provides actionable insights into the architecture of retrieval-augmented, adaptable AI systems. Deployment use cases include forensic analysis, mapping, navigation, and digital content verification, all of which benefit from robust, adaptive, and privacy-compliant location inference.
Conclusion
GeoSearch establishes a new standard for open-world image geolocalization by tightly integrating web-scale reverse image search, ECEF-based representation learning, multimodal LMM reasoning, and adaptive filtering. It notably improves fine-grained accuracy under rigorous, leakage-aware benchmarks, while remaining competitive even when deprived of closed-world advantages. Future research directions include lightweight prompt design, privacy-preserving search strategies, and real-time deployments.