- The paper introduces a bidirectional ego-environment coupling mechanism that integrates planning and prediction for proactive trajectory selection.
- It leverages structured ego queries and continuous BEV predictions to refine candidate trajectories and evaluate safety metrics like NC, DAC, and TTC.
- Empirical results on NAVSIM v1 show a state-of-the-art PDMS of 86.6, highlighting improved safety and efficiency in complex driving scenarios.
ProDrive: Proactive Planning for Autonomous Driving via Ego-Environment Co-Evolution
Motivation and Context
Autonomous driving demands not only high-quality perception but also the anticipation of complex, dynamic interactions in real-world environments. Previous end-to-end planners predominantly operate reactively, mapping current sensory input to actions without directly modeling scene evolution. This causes myopic planning and safety-critical errors in highly interactive or uncertain scenarios. While recent introductions of world models and prediction-conditioned planning have advanced anticipatory reasoning, these mechanisms are generally loosely coupled with the planner and primarily provide auxiliary candidate trajectory evaluation or data augmentation.
ProDrive introduces a paradigm shift by tightly integrating future scene reasoning and planning at both feature and optimization levels. The proposal departs from models where the planner and world model operate largely independently, and instead enables bidirectional interaction such that ego intentions and environmental dynamics co-evolve during planning and training.
System Architecture
ProDrive consists of two principal components: the Ego Module (a structured, query-centric trajectory planner) and the Environment Module (a BEV world model for future prediction and trajectory evaluation). The connection between these is realized through a novel Ego-Environment Coupling mechanism.
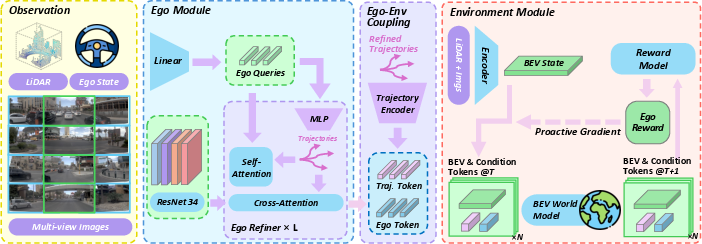
Figure 1: Overview of the ProDrive architecture, highlighting the interaction between the Ego Module's ego tokens and the Environment Module's future scene prediction and reward-based evaluation.
Ego Module
The Ego Module leverages multi-view images and LiDAR, refining a pool of learnable ego queries through stacked Ego Refiner layers. Each query represents a potential trajectory segment. Through iterative cross-attention, these ego tokens incorporate spatial scene context at each candidate's waypoint locations, enhancing the planning representation's expressiveness and robustness. The module outputs a set of diverse candidate trajectories, each encoded as a sequence of trajectory tokens containing enriched semantics from both raw observations and the planner's internal reasoning.
Environment Module
Conditioned on both the current BEV state and the trajectory tokens from the Ego Module, the Environment Module performs recurrent rollouts to predict how the scene is likely to evolve under each candidate intention. The predicted futures are semantically compact BEV representations, not raw sensor images, allowing efficient, agent-centric simulation. Each candidate trajectory is evaluated according to a multi-head reward function that encompasses imitation loss (closeness to expert), safety (no at-fault collision, drivable area compliance, TTC), progress, and comfort.
Ego-Environment Coupling
ProDrive’s core innovation lies in its bidirectional interaction between planning and prediction. Planner-refined ego tokens are explicitly injected into the world model at each scene rollout step. Consequently, environmental evolution is shaped by enriched, intent-aware representations, capturing more than the geometric path. Conversely, backpropagation from the world model's reward evaluation provides end-to-end gradient feedback that directly updates the planner’s internal reasoning. This mechanism closes the loop, making future reasoning a first-class, actionable training signal—enabling proactive, foresighted planning.
Empirical Results
Evaluation is conducted on the NAVSIM v1 benchmark, which emphasizes complex, interactive driving scenarios. The principal quantitative metric is Predictive Driver Model Score (PDMS), factoring in no at-fault collisions, drivable area compliance, TTC, comfort, and ego-progress.
ProDrive achieves state-of-the-art results, with a PDMS of 86.6, surpassing all reactive baselines and existing proactive systems. Safety-related metrics also peak, with 98.0 NC, 95.4 DAC, and 93.7 TTC, evidencing superior anticipatory decision-making. EP (80.7) demonstrates improved performance in long-horizon, efficiency-critical situations.
Qualitative analyses showcase ProDrive's foresightedness: in occluded merges, intersection traversals, and dense urban traffic, ProDrive anticipates likely interventions from other agents, selects comfortable and safe trajectories, and proactively avoids emergent collision risks.

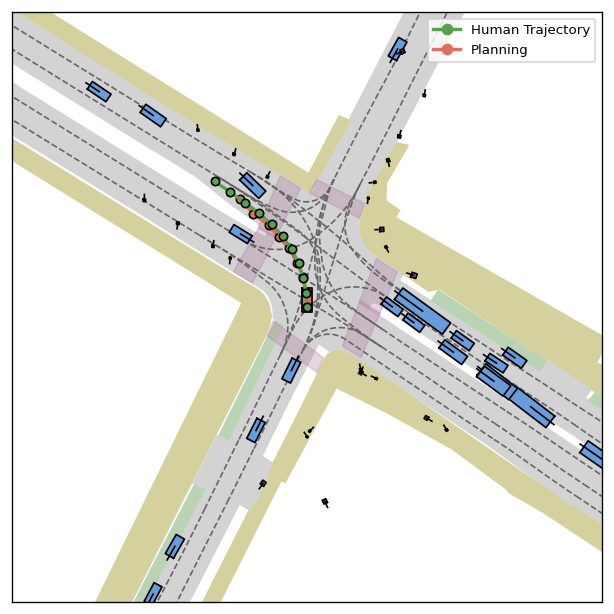
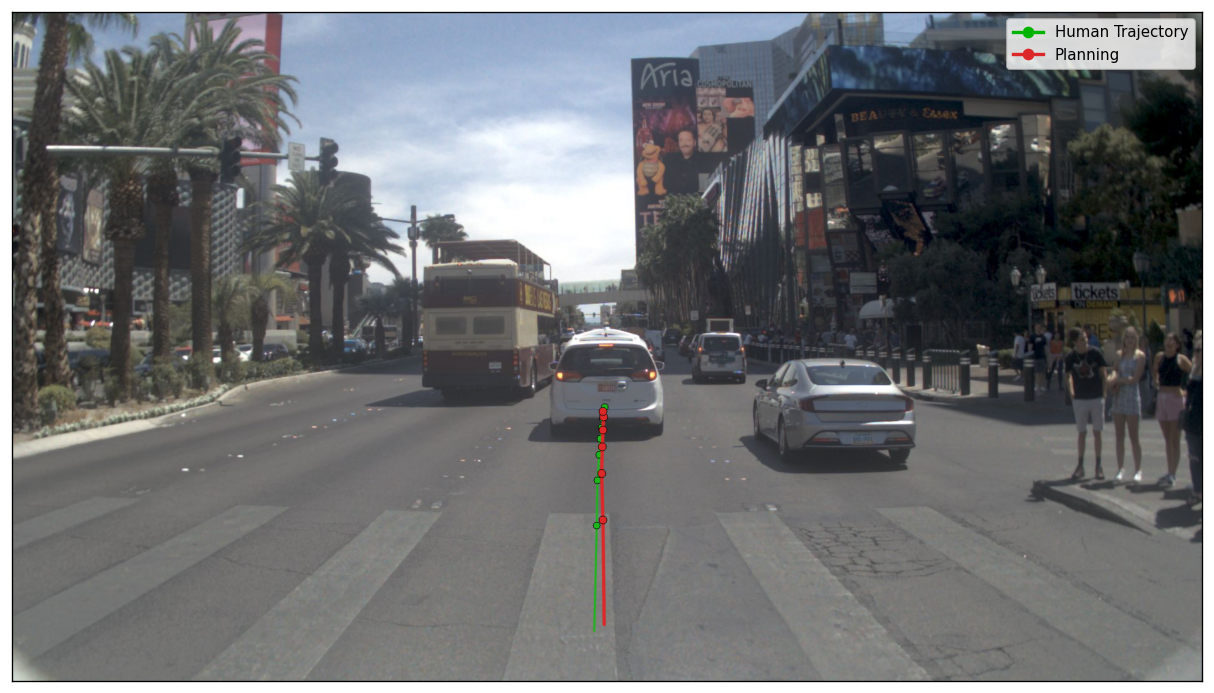
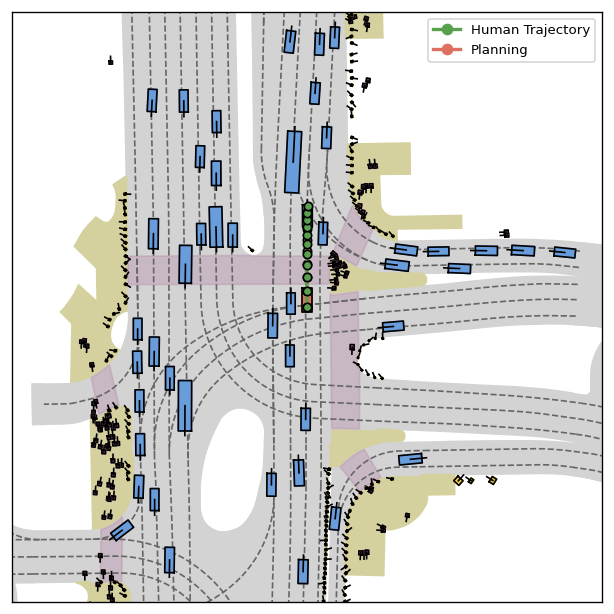

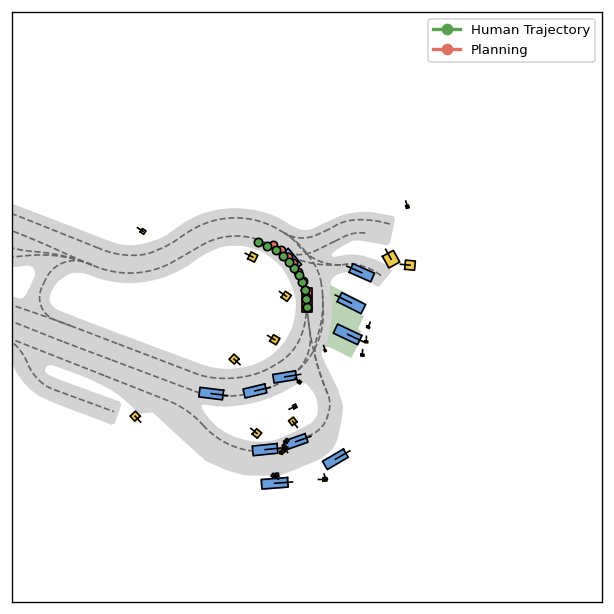
Figure 2: Qualitative driving examples in complex scenarios highlight ProDrive’s anticipatory planning capabilities and consistent avoidance of potential hazards relative to human driver ground truth.
Ablation Studies and Analysis
Component analysis affirms the necessity and impact of each architectural component:
- Omission of the Environment Module (i.e., replacing with a simple reward predictor) causes a substantial regression in both safety (NC drops to 94.9) and efficiency (PDMS to 83.5), demonstrating the criticality of explicit future modeling.
- Removal of ego token injection impairs proactive context propagation, reducing PDMS to 85.5.
- Elimination of end-to-end proactive gradient feedback degrades planning effectiveness, clearly establishing the importance of direct, future-aware optimization.
These ablations indicate that both the injection of planner context into prediction and the closed-loop reward feedback are essential for the attained performance.
Theoretical Implications
ProDrive operationalizes a formal coupling of intention and environment, wherein ego-centric planning representations are made directly accessible to, and influenced by, structured world models. This represents a marked departure from classical decomposition (perception→prediction→planning) or even recent query-based architectures, which do not maintain end-to-end differentiability through future reasoning. By optimizing over both current observations and predicted scene evolution, ProDrive realizes anticipatory policy learning in high-dimensional, multi-agent state spaces.
This coupling mechanism fundamentally enhances the expressiveness of autonomous driving policies, potentially mitigating issues such as compounding error and lack of uncertainty calibration prevalent in reactive models.
Broader Impact and Future Directions
Practically, ProDrive's approach is expected to yield substantial gains in deployment robustness in dense, uncertain, or adversarial environments. Integrating proactive future reasoning may reduce the incidence of "edge case" failures and improve both passenger comfort and traffic integration. The general mechanism—planner-token injection and bidirectional reward-based feedback—can be readily adapted to other domains where foresighted, interaction-aware planning is essential (e.g., multi-agent robotics, social navigation).
Theoretically, future extensions may expand the expressiveness of the world model (e.g., integrating pixel-level video generative models for richer simulation), enable closed-loop RL in open-world environments, or incorporate uncertainty propagation for risk-sensitive planning.
Conclusion
ProDrive establishes a novel framework for proactive autonomous driving by tightly coupling structured ego intention with anticipatory world modeling. Explicit ego token injection and reward-based end-to-end optimization enable the system to plan ahead, not merely react to the present, significantly advancing both safety and efficiency metrics. The empirical analyses and ablations solidify the critical contribution of ego-environment co-evolution, positioning ProDrive as a compelling foundation for the next generation of interactive, safe, and effective autonomous agents.
Reference:
"ProDrive: Proactive Planning for Autonomous Driving via Ego-Environment Co-Evolution" (2604.25329)

