- The paper shows that cooperative path planning using UAV support reduces UGV travel time by over 50% in densely connected urban environments.
- It compares methodologies like k-shortest paths, MPSP, and bidirectional multi-UAV strategies, balancing real-time feasibility with computational overhead.
- The study validates its findings using a diverse benchmark suite from five continents, underlining trade-offs between improved navigation performance and increased resource demands.
Dynamic UGV-UAV Cooperative Path Planning in Urban Environments
Introduction
This paper presents a comprehensive computational study of cooperative path planning for heterogeneous unmanned ground vehicles (UGVs) and unmanned aerial vehicles (UAVs) in uncertain urban environments. It systematically evaluates multiple algorithmic strategies for cooperative navigation across a global benchmark suite representing five continents and varying city morphologies. Emphasis is placed on the impact of UAV speed, the number of UAVs available for cooperation, and real-time computational feasibility.
Benchmark Suite and Urban Diversity
To ensure generalizability and robust empirical analysis, the paper utilizes urban road networks from prominent cities across Africa, Asia, Europe, North America, and South America. For each city, both small (1 km × 1 km) and large (3 km × 3 km) graphs are extracted, capturing different connectivity and block structure scales. Figures 1–5 illustrate representative map samples from Lagos, Tokyo, Moscow, Mexico City, and Sao Paulo, highlighting the heterogeneous spatial/transportation topologies that algorithms are tasked to navigate.
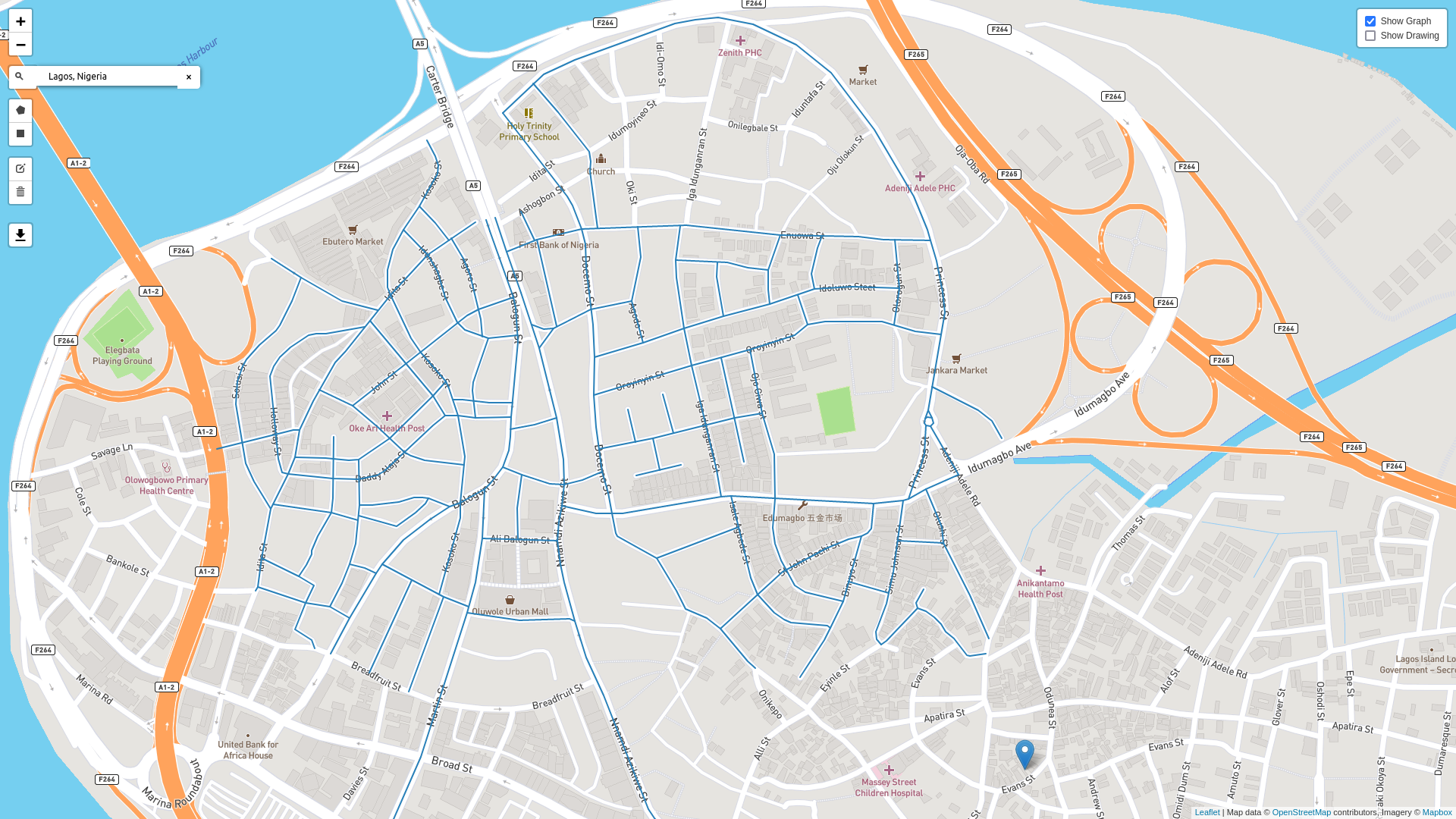
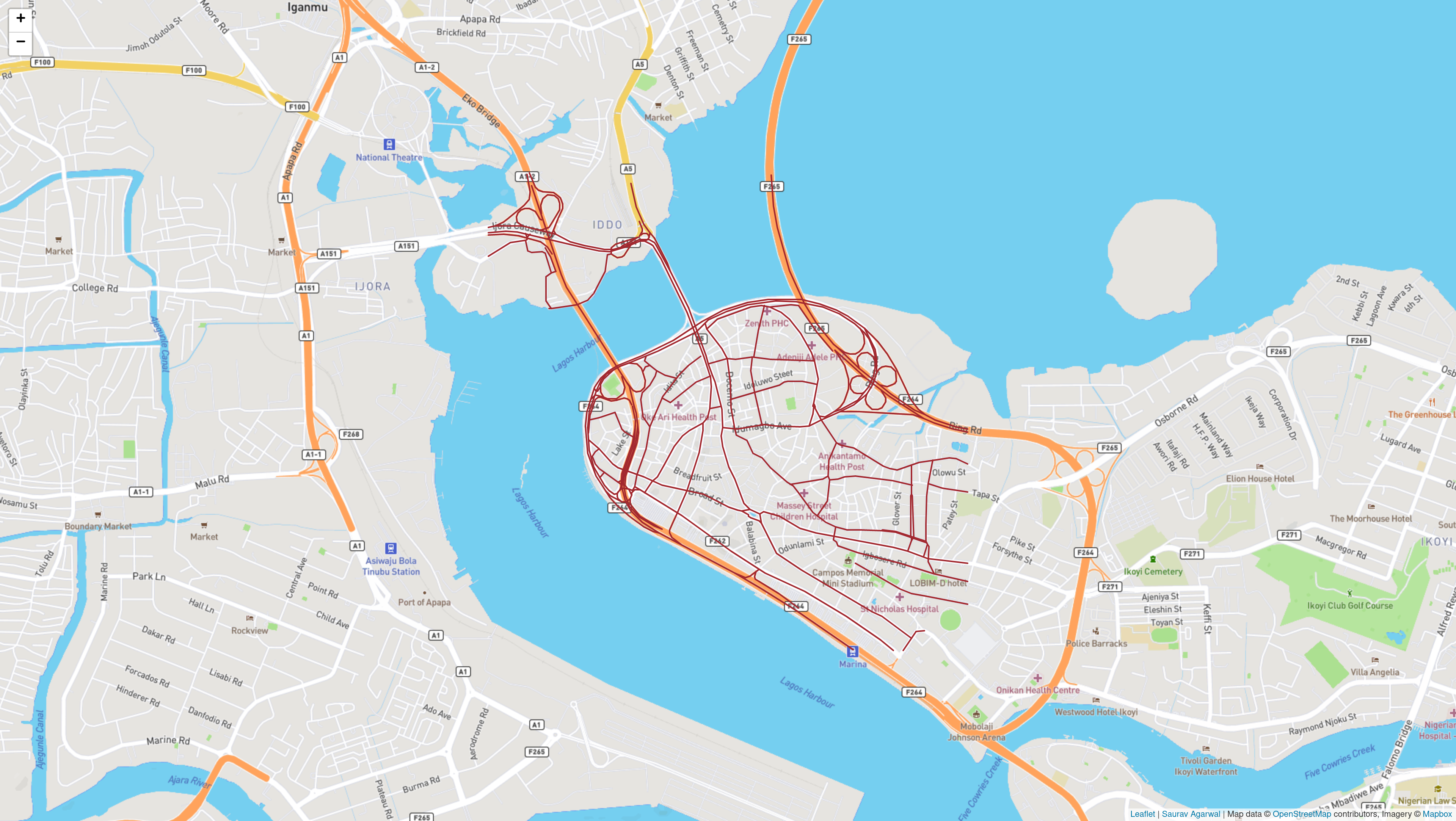
Figure 1: Small and large maps of Lagos, Nigeria.
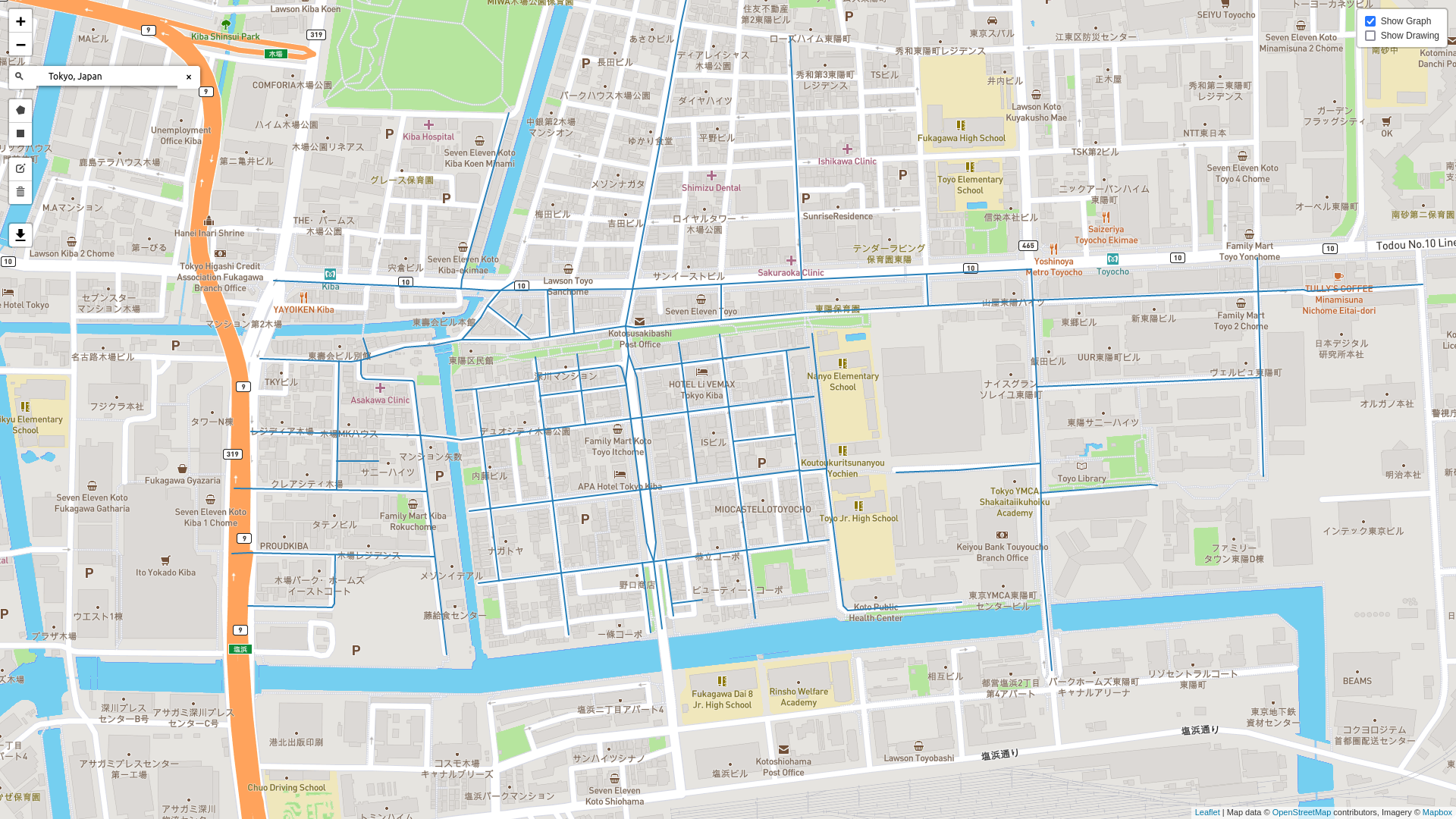
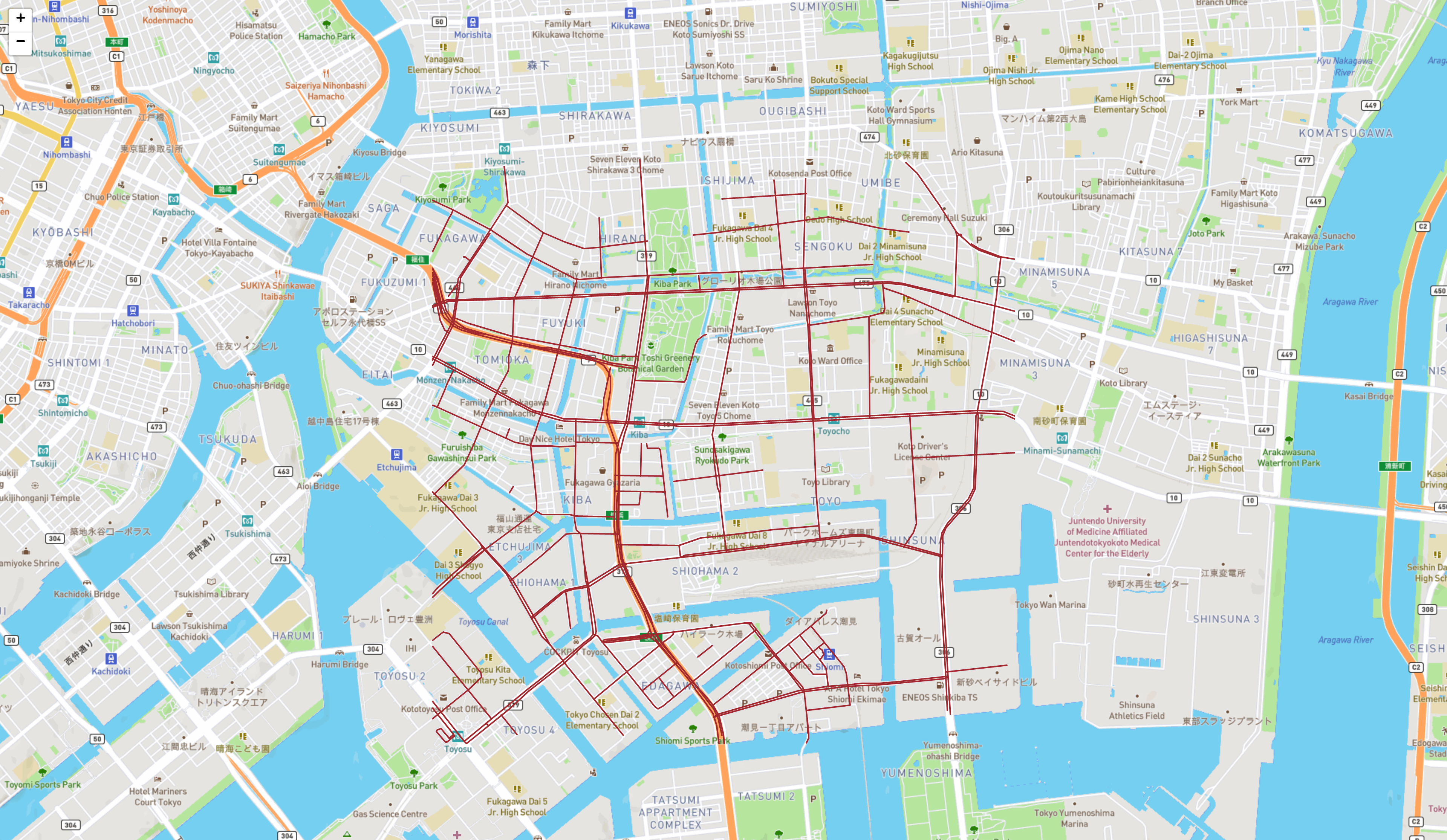
Figure 2: Small and large maps of Tokyo, Japan.
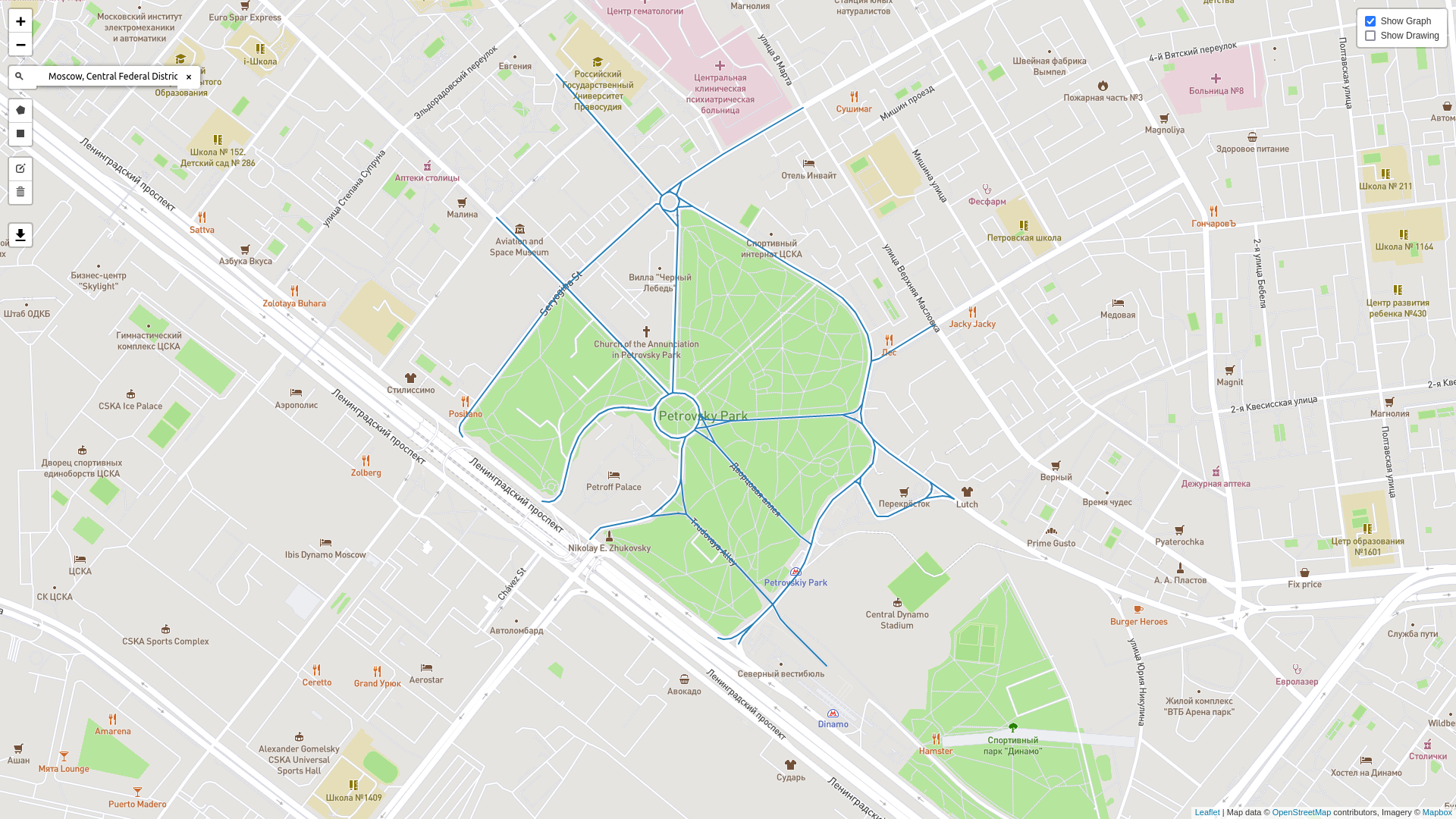
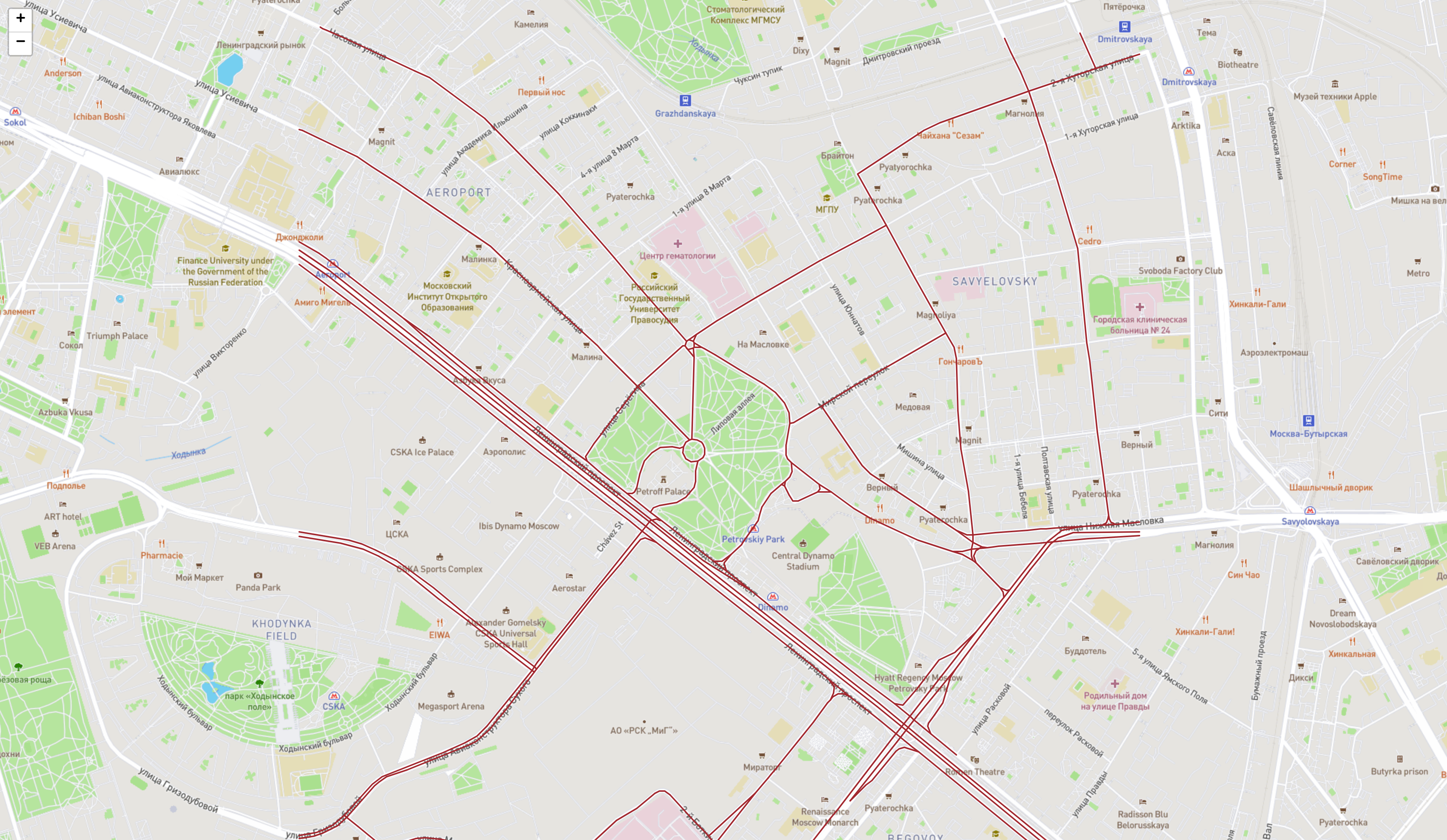
Figure 3: Small and large maps of Moscow, Russia.
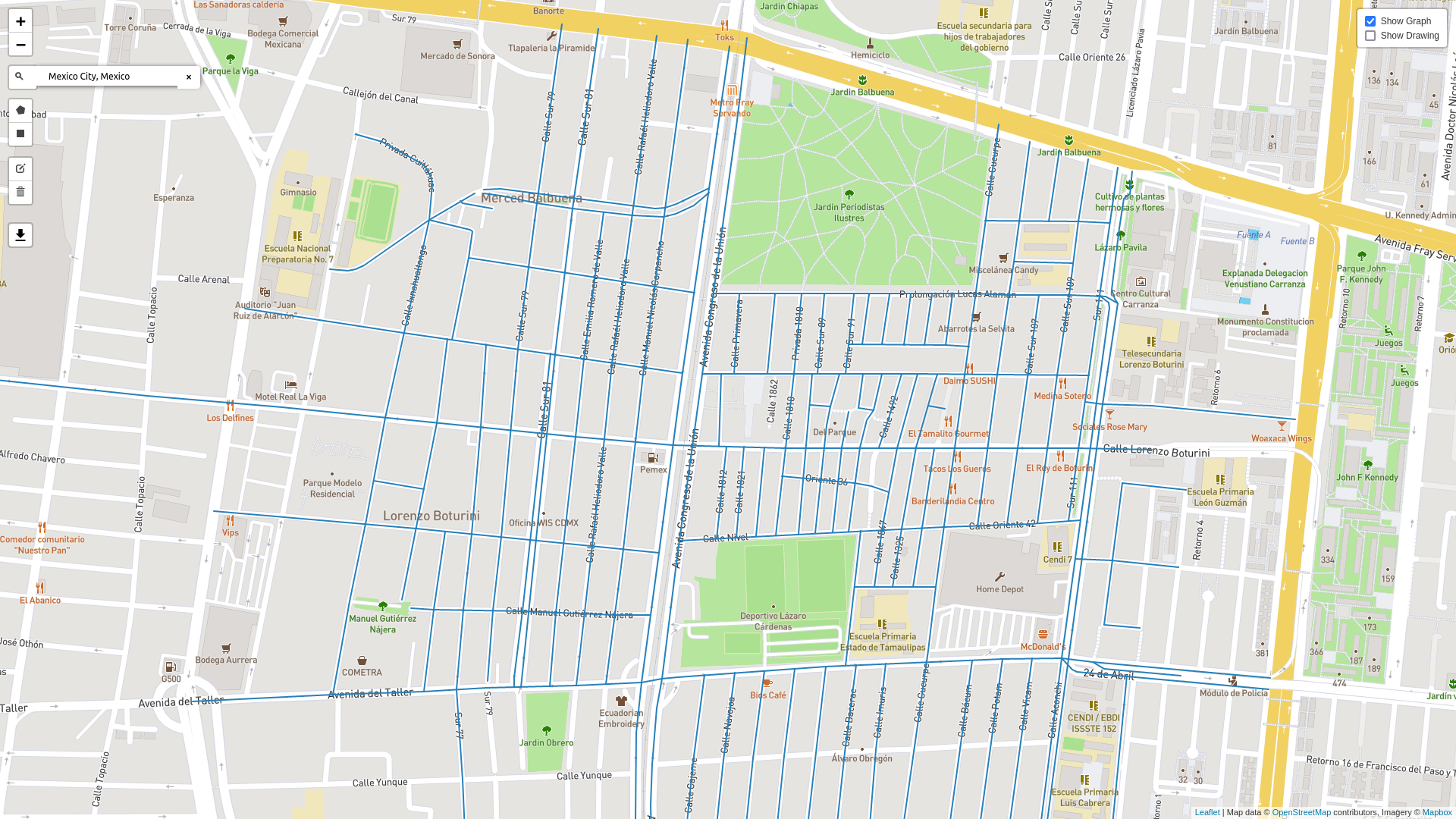
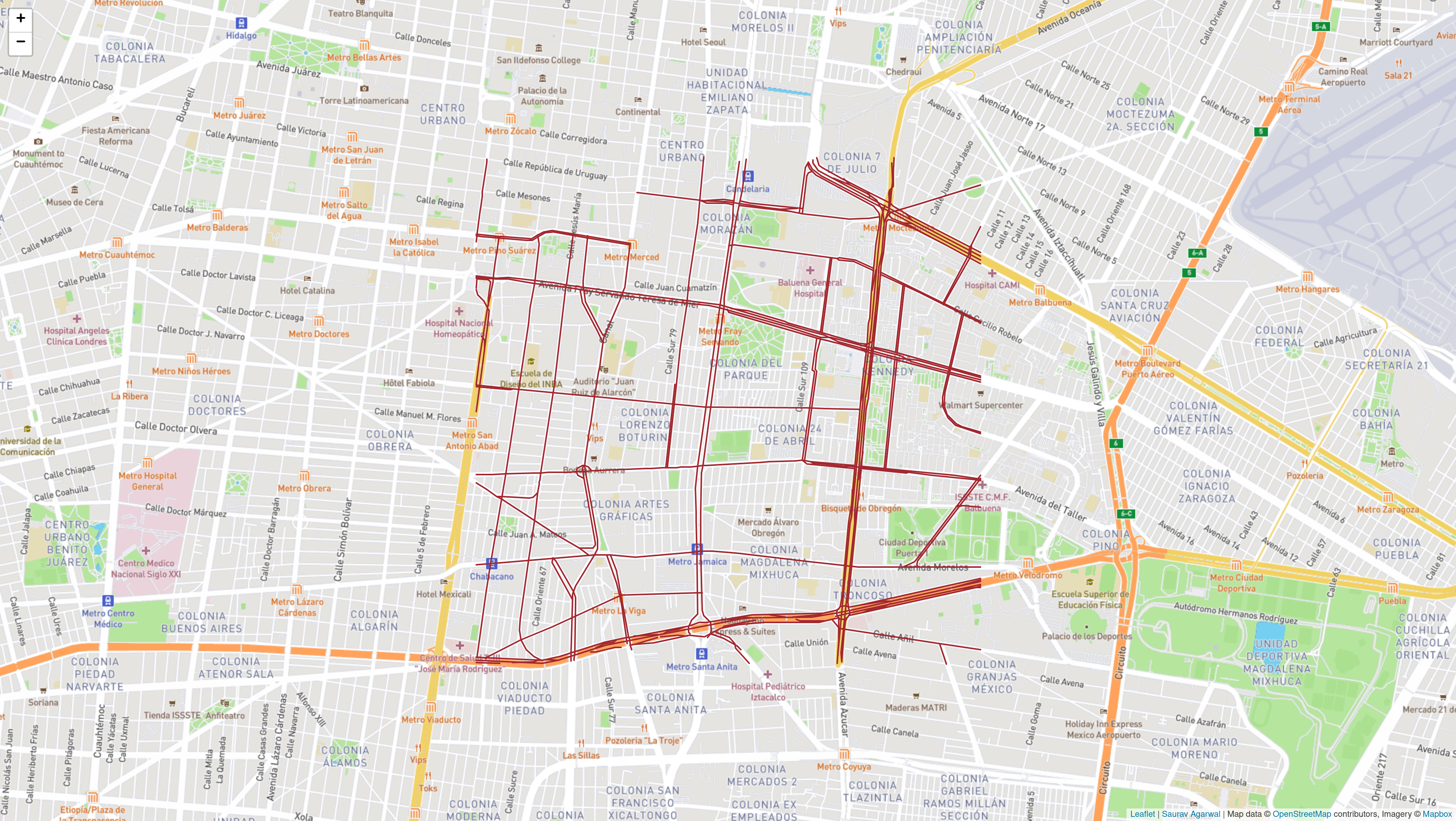
Figure 4: Small and large maps of Mexico City, Mexico.

Figure 5: Small and large maps of Sao Paulo, Brazil.
Path Planning Strategies
The analysis considers:
- UGV-only (Dijkstra): Baseline single-vehicle planning.
- Kemeny-based methods: Utilizing centrality concepts for expected optimal transport efficiency.
- k-Shortest paths: Enumerative approach for path diversity.
- MPSP: Sampling-based multi-path strategy with MC sampling (scaling in parameter m).
- Bidirectional: Fast deterministic method based on Dijkstra.
- Multi-UAV Bidirectional: Extends bidirectional using multiple UAVs with k-shortest variants.
Algorithmic time complexity analysis demonstrates that while single-agent deterministic methods are highly efficient O((V+E)logV), strategies leveraging multiple UAVs rapidly introduce significant computational overhead, scaling as O(kV((V+E)logV)).
Travel Time and Coordination Gains
Across 50 problem instances per configuration, results show clear reduction in average UGV travel time when employing cooperative UAV support. Several strong empirical findings include:
- Increasing UAV speed (relative to UGV) and the number of UAVs directly correlates with reduced path execution time, especially in large, highly connected urban maps.
- For densely connected cities (e.g. Beijing, Moscow, Rio de Janeiro), deployment of 3–7 UAVs often reduces travel time by more than 50% compared to UGV-only baselines.
- Bidirectional multi-UAV strategies consistently outperform single-UAV or purely centrality-based approaches in both speed and route resilience under uncertainty.
- There are diminishing returns beyond 5 UAVs in most cases, but the effect is topology dependent.
Computational Resource Analysis
Computation time analyses establish the practical feasibility boundaries of each method:
- Deterministic single-path strategies (Dijkstra/bidirectional) are consistently sub-second, making them viable for real-time dispatch.
- k-shortest and MPSP (and their multi-UAV variants) accrue order-of-magnitude increases in computation, reaching 10–100s seconds per run for high-k and large urban networks.
- The results indicate that while multi-UAV bidirectional coordination provides minimum travel time, real-time on-board use remains feasible for up to 3–5 UAVs if city graphs are not excessively large.
Implications and Future Directions
By structuring the empirical analysis across diverse urban road graphs, the results indicate that cooperative aerial-ground planning algorithms exhibit robust performance across geographies, particularly for time-critical or emergency scenarios in cities with poor road connectivity or dynamic blockages.
The practical implication is that strategic UAV deployment not only compensates for structural deficiencies in road networks but also enables active information gathering (e.g., rapid environment observation for dynamic replanning) for UGV safety.
Future directions include:
- Extending benchmarks to real-world stochastic traffic updates and adversarial disruptions.
- Improving the scalability of sampling-based or MC strategies for larger UAV teams.
- Developing context-aware hybrid strategies that can adapt the level of UAV support and algorithmic complexity based on situational criticality and hardware limitations.
Conclusion
This study establishes a systematic empirical and theoretical reference for UGV-UAV cooperative path planning under uncertainty, balancing solution quality against computational tractability. The evidence demonstrates substantial travel time improvements with coordinated aerial assistance while delineating the trade-offs when deploying multi-agent methods in real urban environments. The findings advocate for hybrid and adaptable strategies in large-scale urban mobility systems and suggest concrete steps for future algorithmic and applied research in autonomous cooperative navigation.

