- The paper introduces a recursive least squares (RLS) framework for real-time non-contact force and torque compensation in wrist-mounted sensors.
- It exploits a linear parameter model to achieve rapid convergence, reducing force errors by over 95% and torque errors by over 91%.
- The system eliminates the need for pre-calibration and demonstrates robust performance under varied orientations and external loads in haptic-enabled surgical training.
Introduction
Haptic feedback remains critical in robotic-assisted surgery, particularly for realistic training platforms that must deliver tactile cues mirroring the clinical environment. Commercial systems using tip-mounted force/torque (F/T) sensors often suffer from significant integration, cost, and durability constraints. Wrist-mounted sensors, though more practical for affordable surgical training simulators, intermingle true contact signals with substantial non-contact artifacts—gravitational, bias, and installation-induced effects—that, if uncorrected, critically degrade force signal fidelity. This work proposes and validates a recursive least squares (RLS)-based framework for robust, real-time non-contact force compensation for such sensors, facilitating reliable extraction of external forces without the need for pre-collected calibration datasets or regular manual recalibration.
In the presented system, a 6-axis F/T sensor is wrist-mounted on a robotic manipulator for haptic-enabled surgery training. Misalignment between robot and world gravity frames, along with neglected inertial effects in quasi-static applications, mandates accurate estimation and removal of both sensor bias and gravitational torque/force contributions. The force measured by the sensor in its local frame decomposes as:
Sf=Sfcontact+ESR⋅BER⋅Bf+Sf0
where ESR captures misalignments at the sensor-teach point, BER derives from forward kinematics, Bf models end-effector gravity, and Sf0 the sensor zero offset. By simplifying the mounting to approximate frame alignment (ESR≈I) and freezing parameters estimation during detected contacts, the model supports simultaneous estimation of all unknowns using RLS.
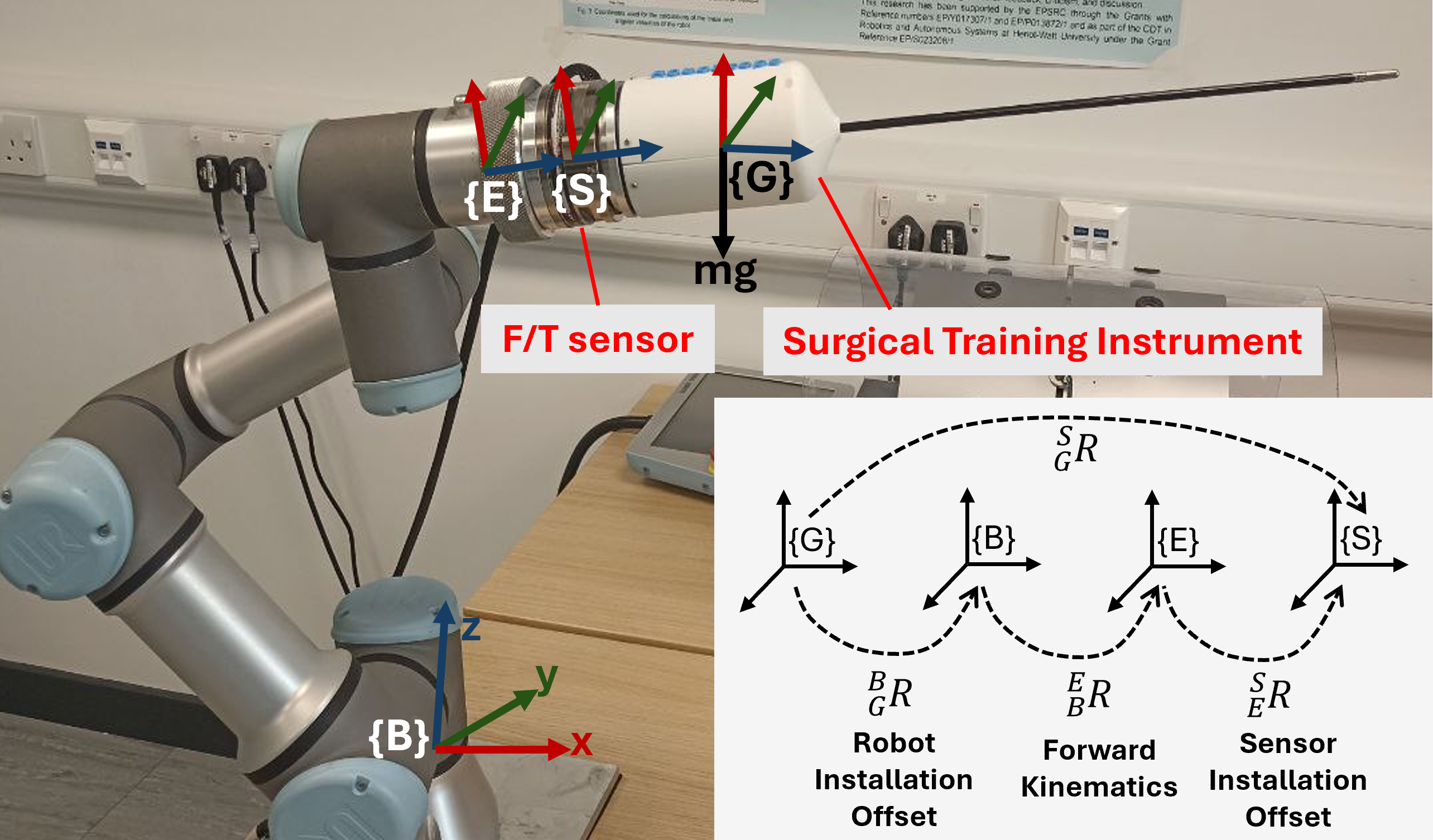
Figure 1: The coordinate frames used for offsets estimation and gravity compensation in a wrist-mounted F/T sensor configuration. Commonly, the robot base frame is not aligned with the gravity reference frame.
Recursive Least Squares Compensation Approach
The compensation method exploits the structure of the linear parameter model for both force and torque channels. During no-contact operation, force and torque samples, robot forward kinematics, and RLS quickly update estimates of gravity, installation, and bias parameters:
y=Cx
with y as measurement, C as observation matrix (function of robot pose), and x the parameter vector. RLS enables continuous adaptation to setup changes and mitigates sensor offset drift—a limitation in existing batch and static calibration approaches.
A contact detection submodule pauses parameter updates during external loads, leveraging the 2-norm residual for discrimination between contact and no-contact phases. Cascaded compensation is applied: force parameters stabilize first, then torque bias and the sensor-to-center-of-gravity position vector are rapidly identified.
Parameter convergence is reached in approximately 242 force and 238 torque samples (at 1 kHz sampling, below a third of a second latency). The estimated center of gravity closely aligns with expected instrument geometry.
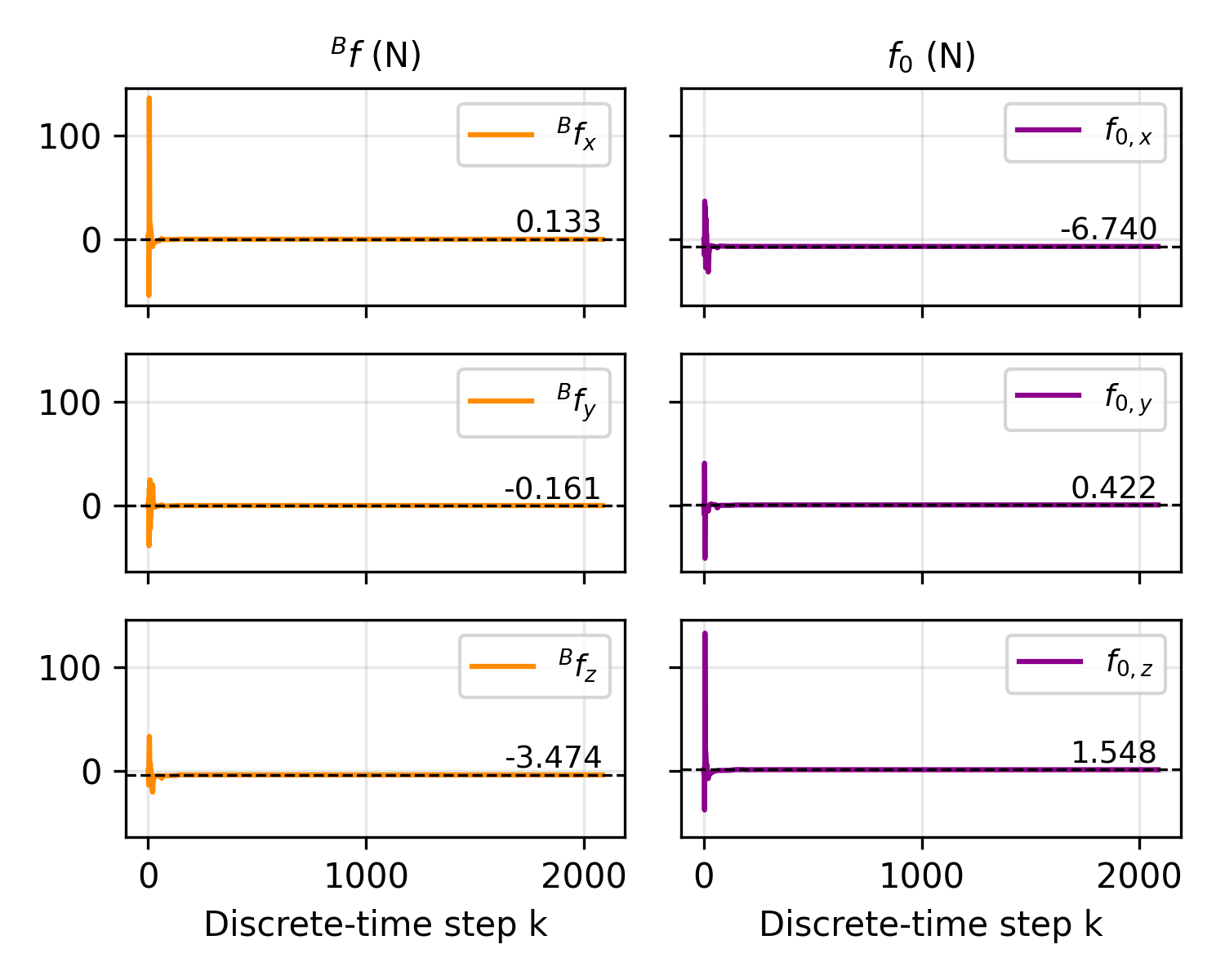
Figure 2: Estimation of the force model parameters. Convergence was achieved after 242 measurements.
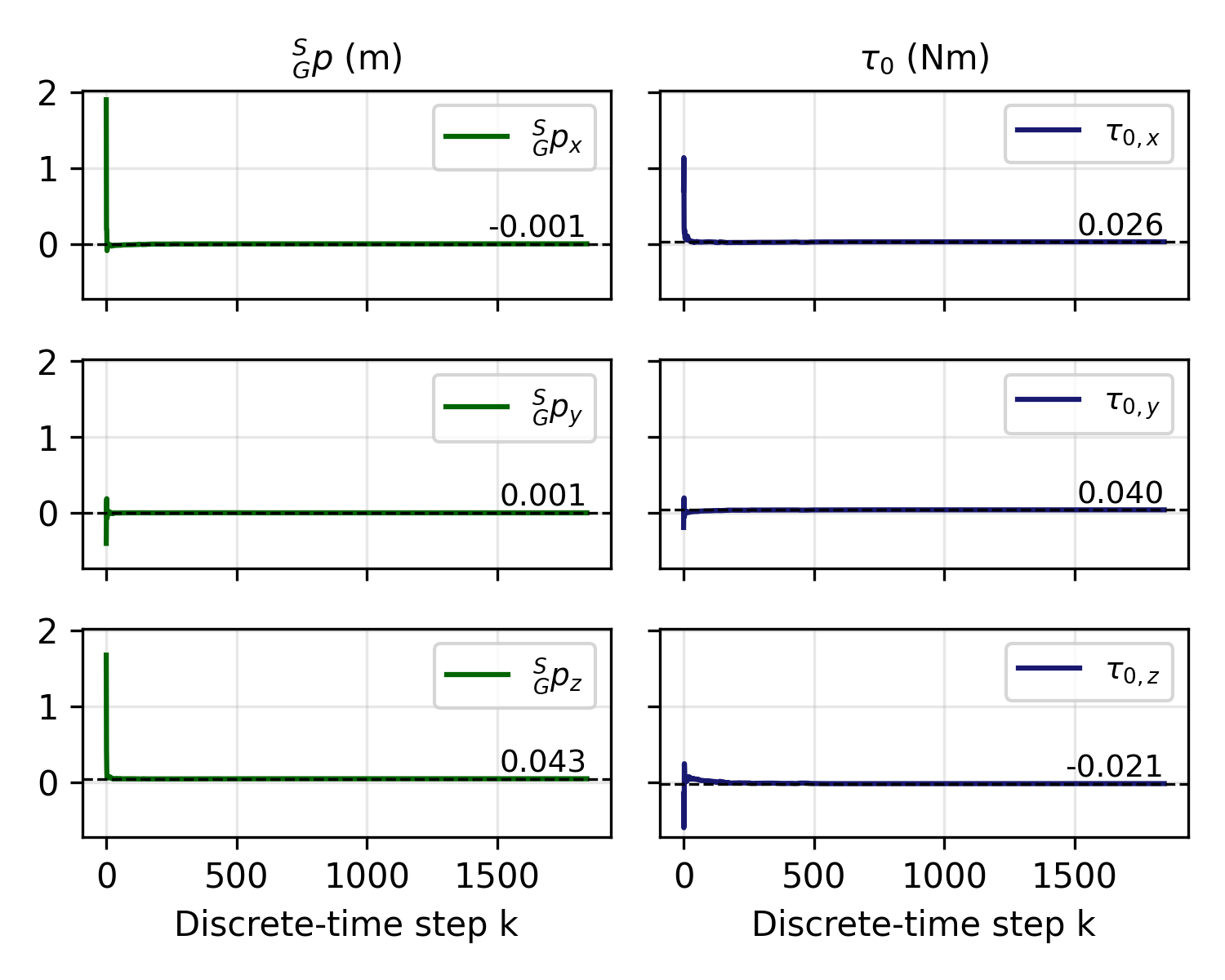
Figure 3: Estimation of the torque model parameters. Convergence was achieved after 238 measurements.
Substantial error reduction is demonstrated for both force and torque channels:
- Force mean absolute error (MAE) is reduced by more than 95%.
- Torque MAE is reduced by over 91%.
- Maximum absolute force error is consistently less than ±0.58 N, and torque less than ±0.05 N·m, substantially outperforming prior state-of-the-art methods [yu2021bias].
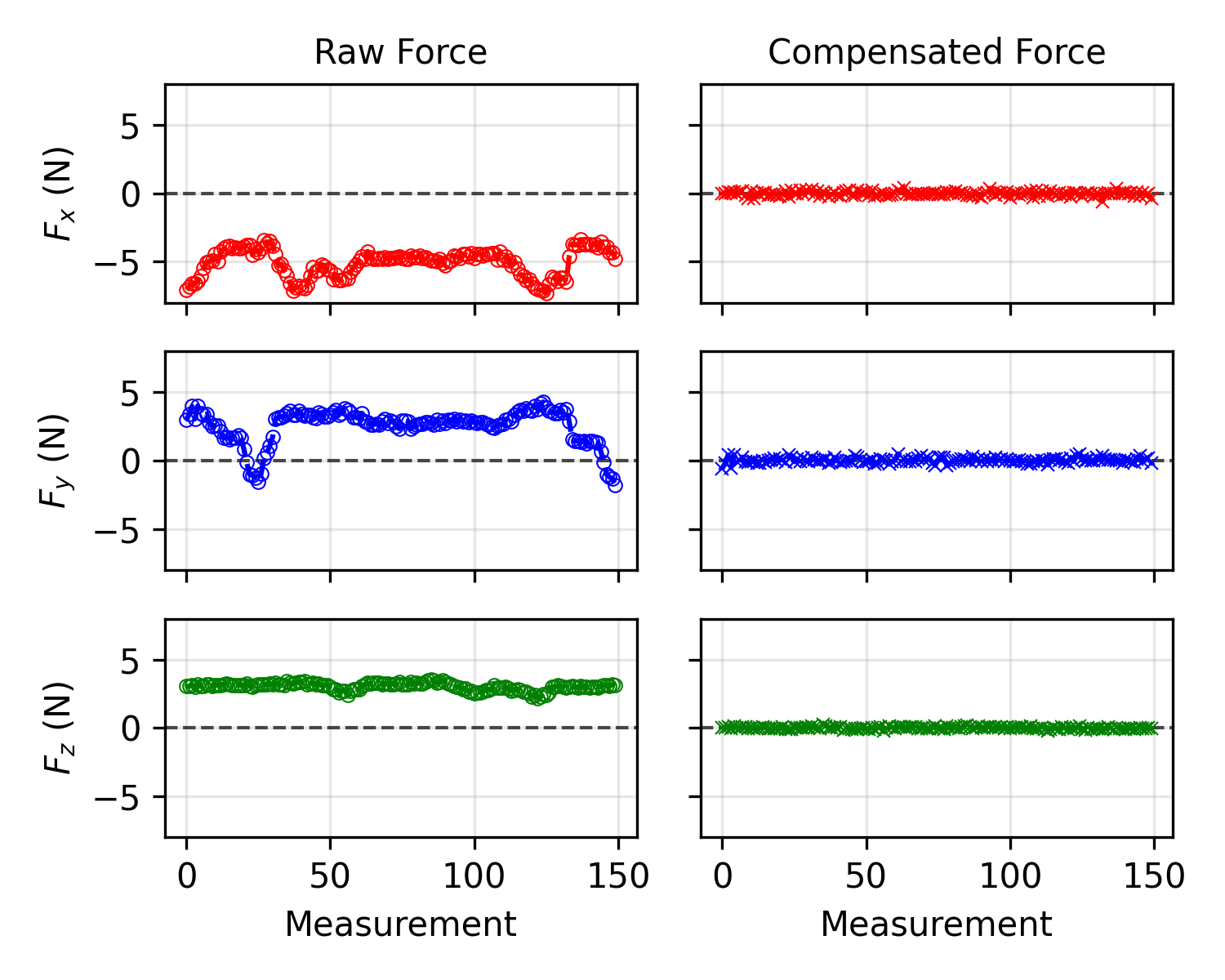
Figure 4: Force measurement before and after compensation. The left is the raw sensor data, and the right is the compensated force signals.
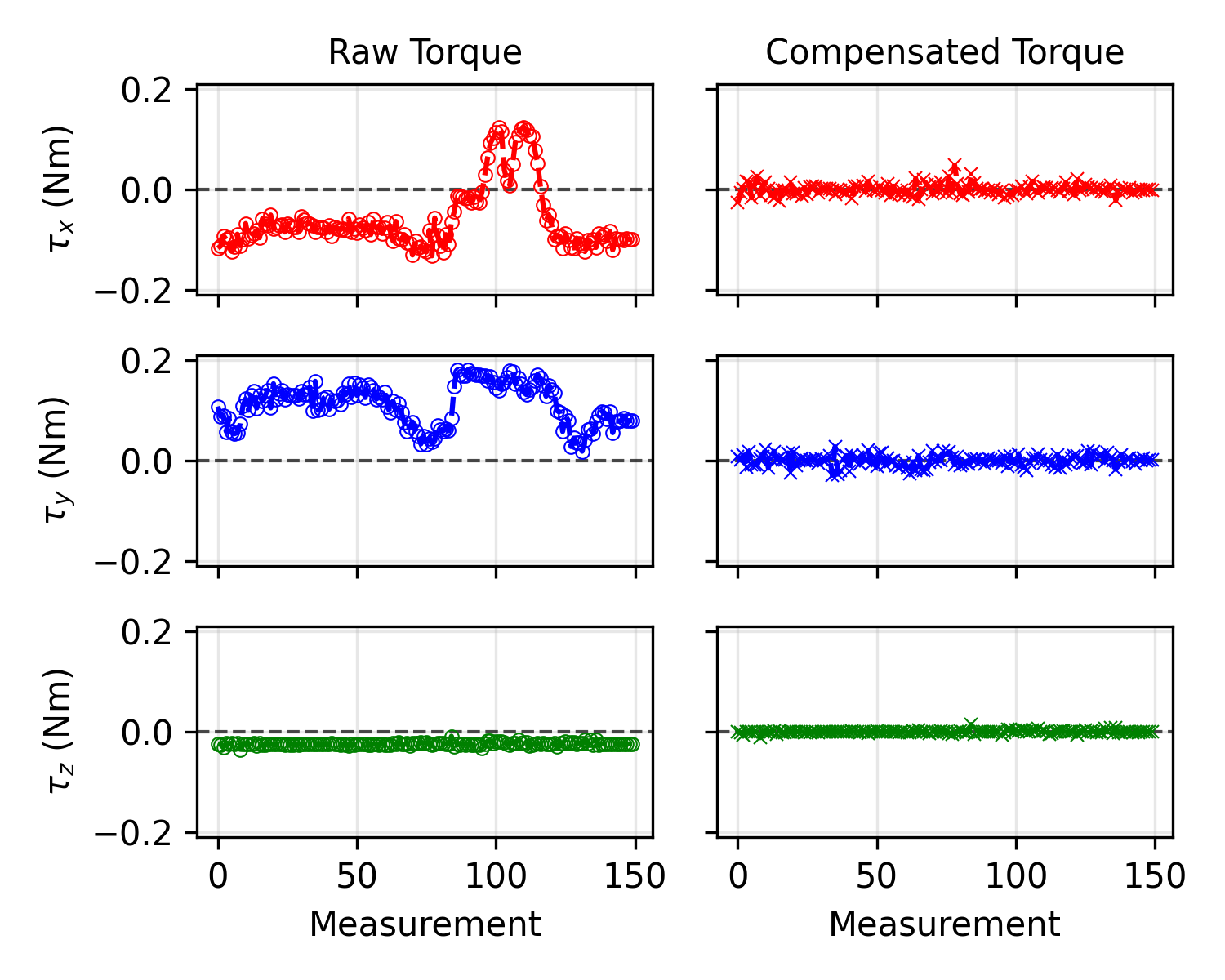
Figure 5: Torque measurement before and after compensation. The left is the raw sensor data, and the right is the compensated torque signals.
In direct comparison, the method reduces error bounds by a factor of approximately two relative to previous model-based compensation approaches.
Robustness Under External Load and Rotational Motion
During external contact force application with a silicone phantom, the algorithm accurately discriminates between passive and active load periods. Compensated force signals return to zero promptly after contact events, reflecting negligible bias or drift.
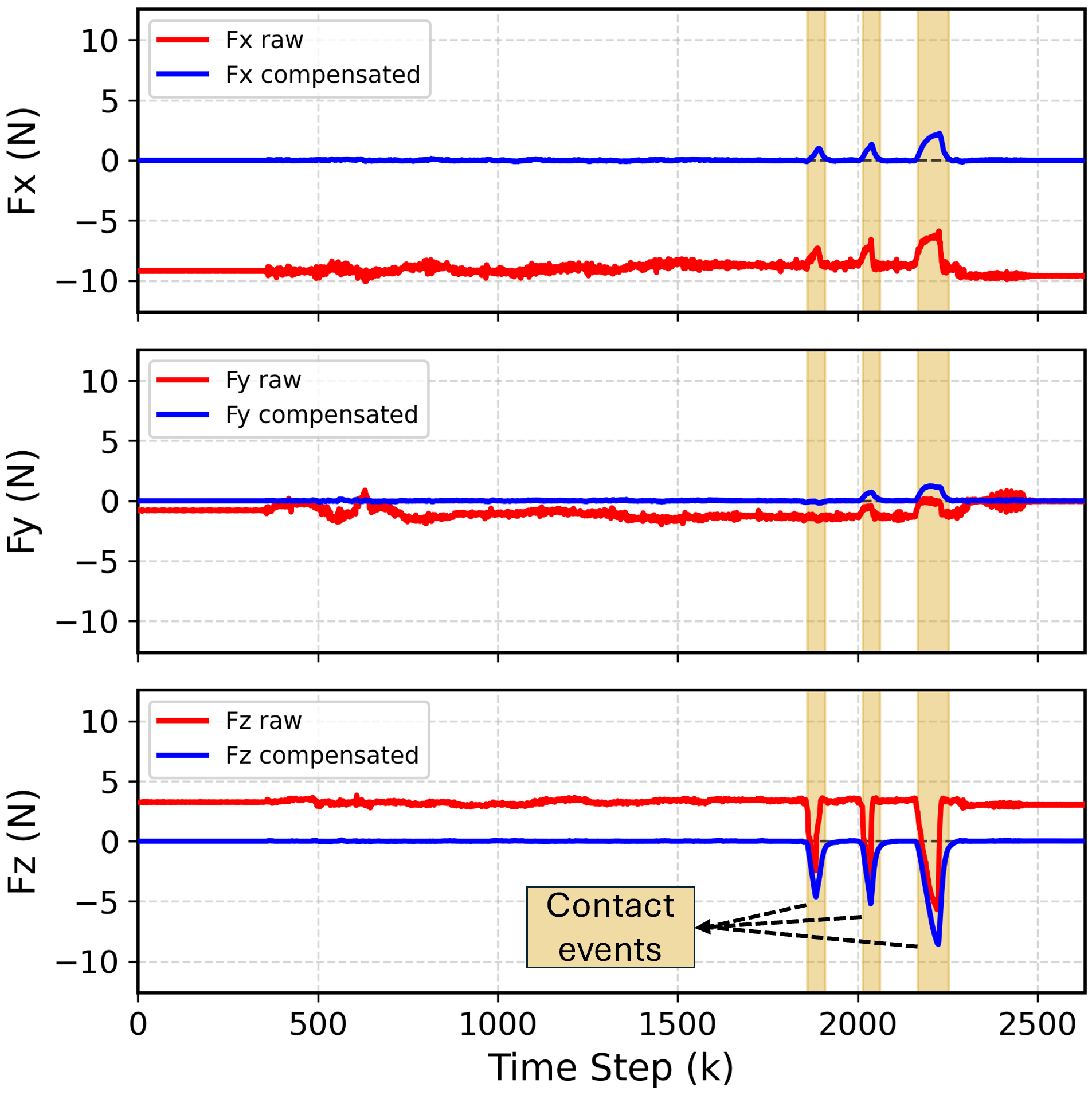
Figure 6: Compensation performance under external contact forces. Red curves represent the raw force measurements from the sensor, while blue curves show the compensated forces obtained using the proposed method.
A rigorous rotation test with a calibrated 1.02 N reference mass subjected the end-effector to 360-degree axial rotations at up to 72 deg/s. Across all velocities:
- Mean compensated force matches the reference to within 1%.
- MAE remains below 0.04 N at all but the highest speeds, peaking at 0.04 N (ESR03.9% of load).
- The method remains robust against varying orientation, showing only minor inertial losses at high speeds.
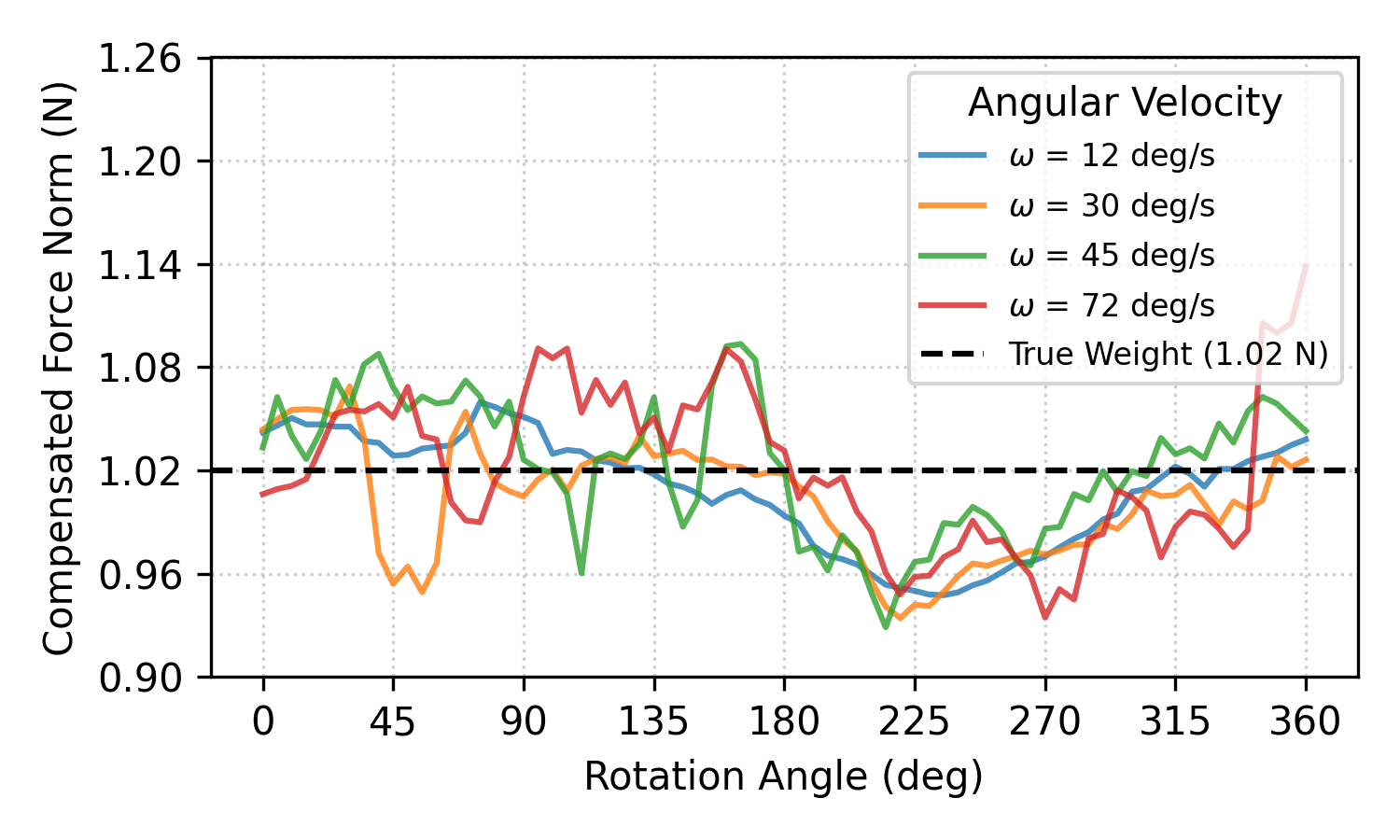
Figure 7: Compensated force magnitude during a 360-degree axial rotation of the instrument with a 104g (ESR11.02 N) reference mass across four different angular velocities.
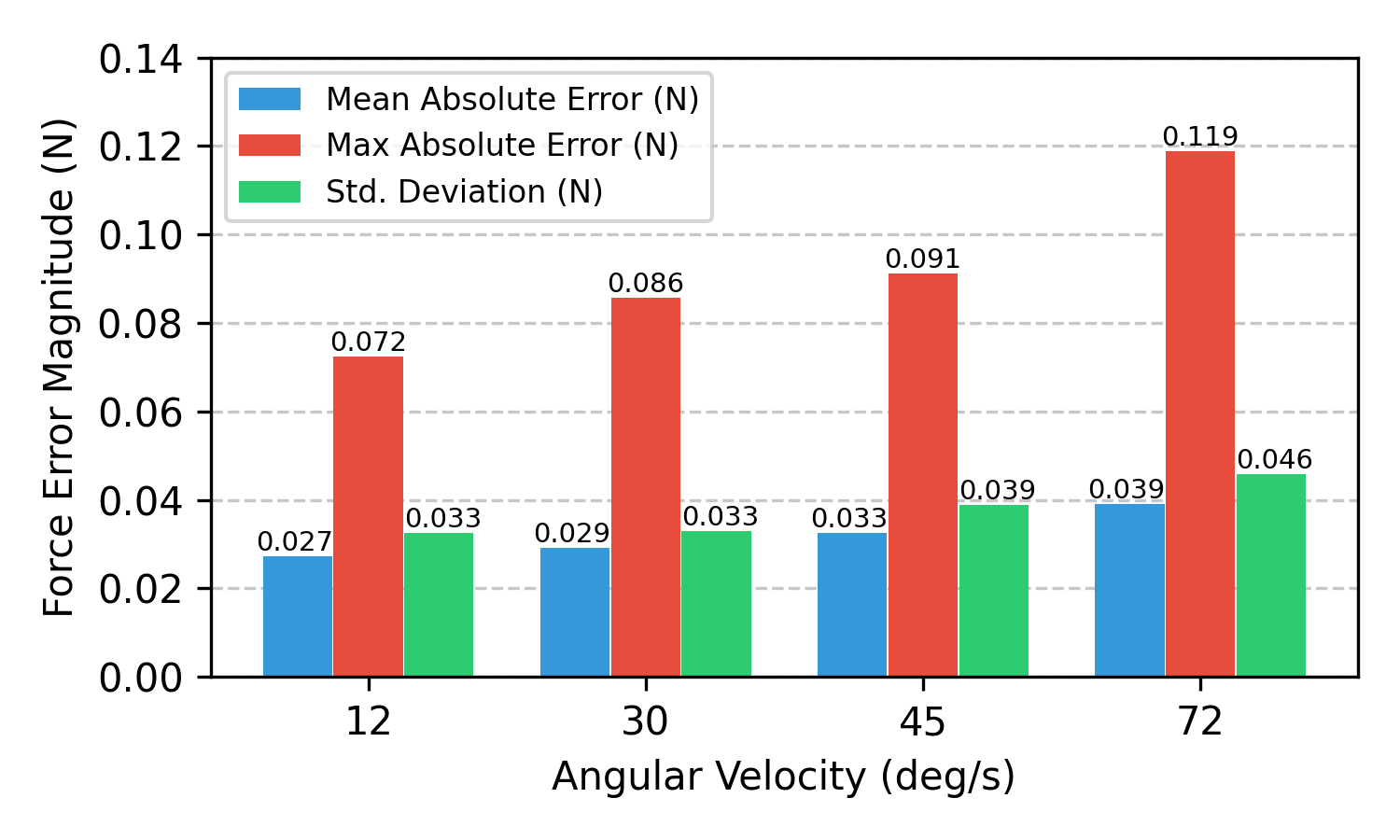
Figure 8: Performance evaluation metrics for the tested angular velocities. The MAE and Std remain consistently low across all speeds, while the Max AE shows a slight increase at higher velocities due to inertial effects.
Implications and Future Directions
The RLS-based compensation method eliminates the need for custom calibration datasets, robot orientation sweeps, or prior setup information. This dramatically reduces operational complexity and facilitates real-time integration into low-cost training robots, haptic teleoperation interfaces, and research platforms. The demonstrated robustness to setup changes, sensor drift, and orientation/velocity variation makes it especially attractive for practical, deployable systems that require turnkey force feedback correction.
From a theoretical perspective, this work exposes the limitations of batch, static, and geometry-specific compensation schemes and motivates future integration of dynamic effects (inertial and Coriolis) for higher-speed scenarios. Incorporation of machine learning-based adaptation may further enhance performance in more complex manipulation tasks or with variable loads.
Extension to multi-contact scenarios, non-quasi-static operational regimes, or generalized wrist and tool kinematic structures are natural future research directions. Further work should also consider closed-loop haptic tests with human operators in teleoperated surgical training, evaluating the impact on task learning, performance, and user perception.
Conclusion
This paper introduces a real-time RLS framework for full non-contact force and torque compensation in wrist-mounted F/T sensors, specifically addressing the requirements of haptic-enabled robotic surgery training. The approach delivers high accuracy (over 95% force and 91% torque error reduction) and robust operation without the need for extensive recalibration or prior robot setup knowledge. The results indicate significant potential for broad impact in accessible surgical training technologies as well as in other high-precision, low-speed robotic manipulation contexts.

