- The paper introduces a decentralized framework combining local SLAM, supervoxel mapping, and genetic optimization to enhance collaborative multi-robot exploration.
- It employs capability-aware task assignment and efficient map abstraction to reduce communication overhead by 97.8% while ensuring robust 3D coverage.
- Real-world experiments and simulations demonstrate 23–40% faster exploration and reliable performance in challenging indoor and outdoor environments.
Decentralized Collaborative Exploration in Heterogeneous Multi-Robot 3D Mapping
Introduction and Motivation
This work introduces a comprehensive decentralized planning framework tailored for heterogeneous multi-robot systems operating in complex indoor and outdoor 3D environments (2604.23693). Existing literature on multi-robot exploration predominantly targets homogeneous teams or leverages communication-heavy or centralized planning, limiting scalability and applicability to environments with challenging communication constraints and robot heterogeneity. This paper systematically addresses three central challenges: reconciling fine-grained mapping with communication efficiency, accommodating robot capability heterogeneity in view planning, and ensuring coordinated multi-robot task allocation and route consistency in decentralized 3D exploration.
Framework Overview
The proposed system architecture encompasses four principal modules: perception mapping, high-level map abstraction/fusion, collaborative exploration planning, and motion safety management, all supporting decentralized operation. Each robot executes SLAM locally, sharing only essential incremental data and poses for map registration and planning consensus, minimizing bandwidth while enabling robust global 3D reconstruction.
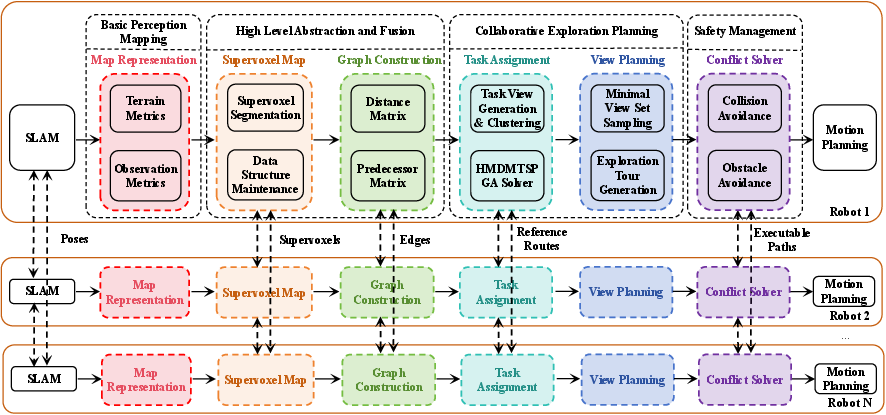
Figure 1: High-level overview of the decentralized heterogeneous multi-robot exploration framework, highlighting the main perception, abstraction, planning, and safety modules with information-sharing pathways.
Perception Mapping and Map Abstraction
A key contribution is the perception map model, which encodes both terrain traversability and observation metrics for each robot species. The framework introduces observation density, observation angle, and observation distance as voxel attributes to comprehensively represent reconstruction quality, supporting informed view generation.
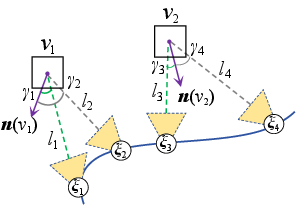
Figure 2: Illustration of the voxel-view relationship, mapping view positions and directions to observed voxels with associated normals for observation metric evaluation.
Supervoxel segmentation is employed to abstract the raw perception map, yielding concise, spatially meaningful clusters, enabling lightweight inter-robot communication. The paper introduces algorithmic improvements to supervoxel segmentation to address the over-segmentation and boundary inconsistency issues that arise due to measurement noise, particularly for large or noisy ground regions.
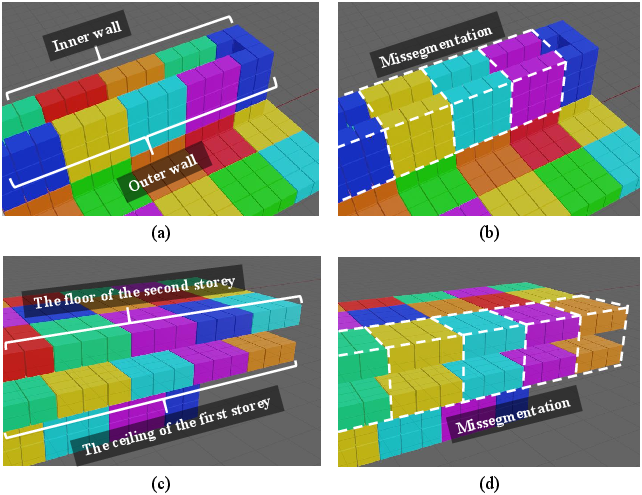
Figure 3: Comparative results between improved supervoxel segmentation and standard clustering, demonstrating superior correspondence to environmental boundaries and the avoidance of erroneous splits in walls, floors, and ceilings.
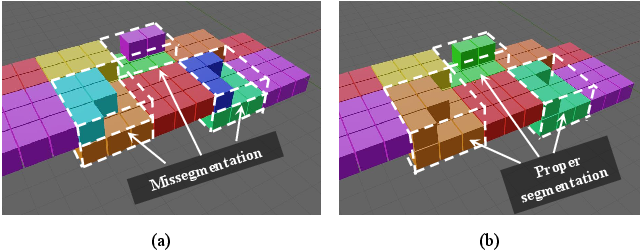
Figure 4: Improved supervoxel-segmentation method effectively prevents noisy ground voxels from being split into redundant layers, enhancing planning reliability.
The supervoxel abstraction forms the basis for constructing a traversal-topology graph, supporting efficient route planning and capability-aware traversability queries.
Capability-Aware Task View Generation and Clustering
Distinct robot capabilities are explicitly modeled in both traversability and observation space. The framework assigns each supervoxel both a traversability requirement (minimum robot capability necessary for access) and an observation requirement, ensuring that future tasks will not result in deadlocks or unreachable goals.
Task views—parameterizations of where and how a region should be observed or covered—are generated via a visibility analysis that takes robot field-of-view, range, and sensor orientation into account.
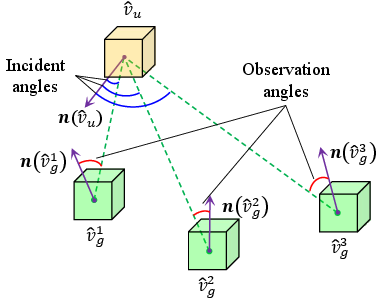
Figure 5: Schematic of the visibility check between ground and facade supervoxels, leveraging geometric and sensor constraints for robust task-view creation.
To reduce the computational burden of direct assignment, task views are clustered based on spatial proximity and shared capability requirements, pre-classifying them as public (achievable by any robot type) or private (assigned based on minimum-capability matching).
Heterogeneous Multi-Robot Task Assignment via Genetic Optimization
The centralized challenge of coordinated multi-robot task assignment is reformulated as a Heterogeneous Multi-Depot Multi-Traveling Salesman Problem (HMDMTSP), with explicit capability–requirement matching constraints. The framework implements a multi-chromosome genetic algorithm variant, emphasizing solution diversity and route consistency through reference-route tracking and dedicated fitness evaluation.
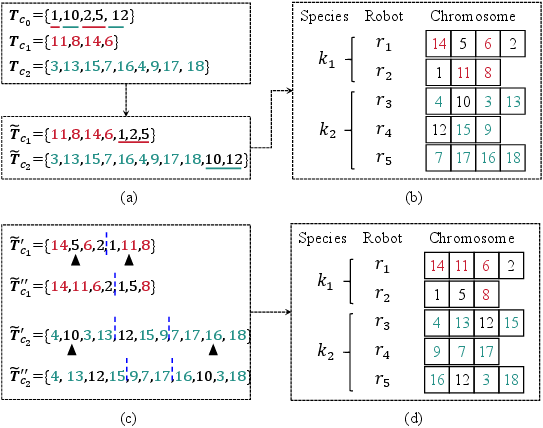
Figure 6: Process for stochastic individual generation, mutation, and redistribution in the multi-chromosome genetic approach for cluster-task assignment among heterogeneous robots.
Path planning within clusters is refined using minimal view-set sampling (MNSS), which eliminates redundant observations while preserving full surface coverage and sequence constraints.
Experimental Validation and Comparative Analysis
Extensive simulated and real-world deployments demonstrate superior exploration efficiency and communication savings over established approaches (MDVRP+, MROMT+, TSPGA+). The system exhibits marked reductions in exploration time (23–40% reduction in complex scenarios), history-trajectory length, and accumulated completeness (reflecting reduced overlap and improved partitioning), relative to baselines.
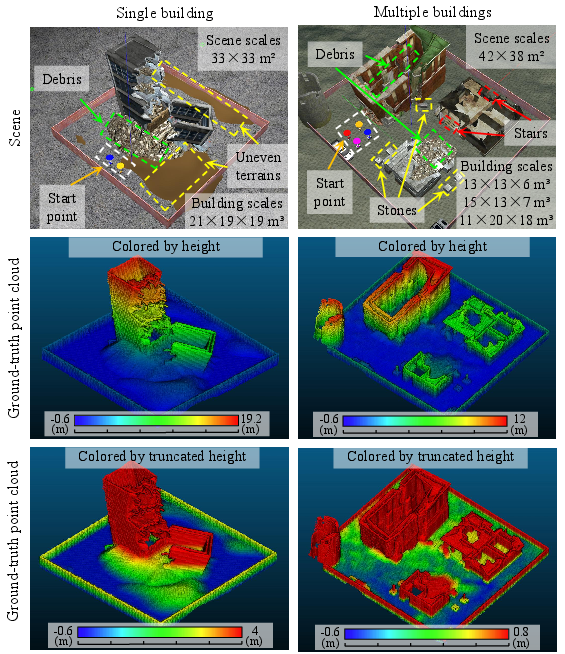
Figure 7: Visualization of simulated test environments, with detailed ground-truth point clouds for both building surfaces and uneven terrain.
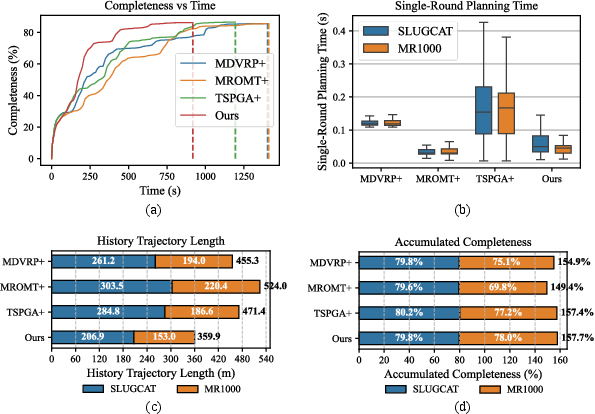
Figure 8: Quantitative metrics for single-building scenarios, showing completeness over time, planning time per round, total path length, and robot overlap for the proposed and comparative methods.
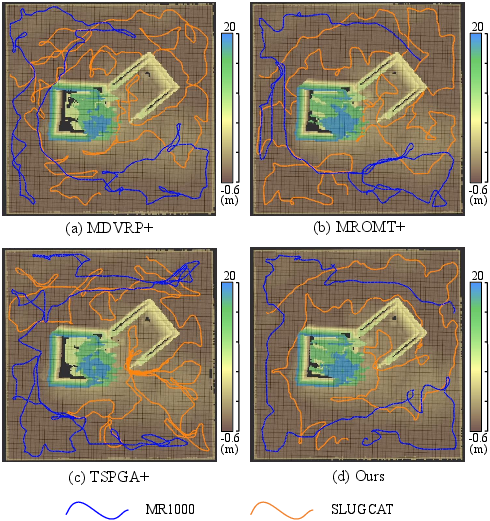
Figure 9: Top-down reconstructed map and exploration trajectories indicating the spatial coverage and path efficiency of four evaluated methods.
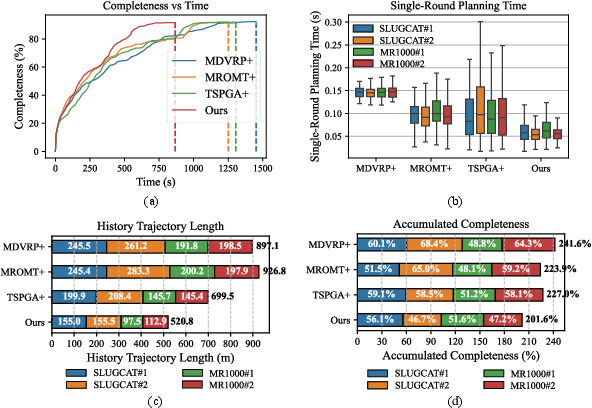
Figure 10: Performance metrics in multi-building environments, with clear evidence of enhanced efficiency and reduced redundant travel in the proposed approach.
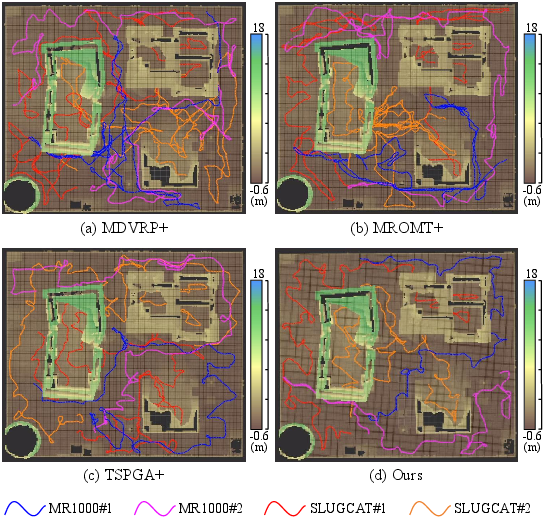
Figure 11: Exploration trajectories in multi-building settings, where the proposed approach yields minimally overlapping, coverage-balanced paths.
Computation runtime analysis shows that high-level map fusion and topology updates are responsible for a manageable fraction of total cost. The entire exploration loop runs at 7.39Hz, supporting real-time operation even in large scenes.
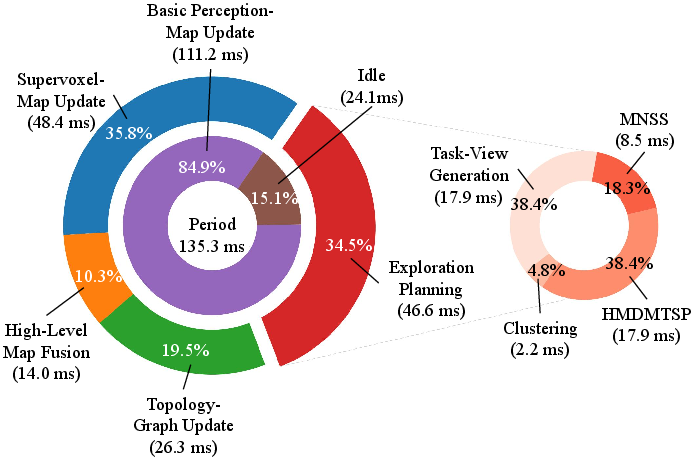
Figure 12: Runtime allocation among key perception, planning, and map fusion modules during operation.
Communication analysis demonstrates a 97.8% reduction in map transmission overhead relative to full-map sharing by leveraging the incremental supervoxel fusion scheme.
Ablation studies confirm that omitting any major module—capability modeling, clustering, MNSS, or capability-aware assignment—results in significant degradations in completeness, trajectory efficiency, or computational time.
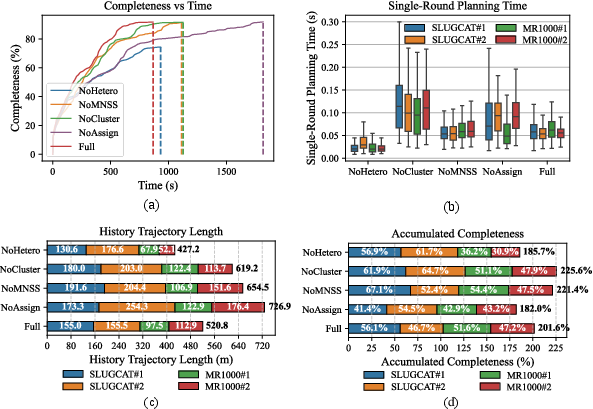
Figure 13: Ablation-study metric results for exploration completeness, planning time, and trajectory efficiency across variants.
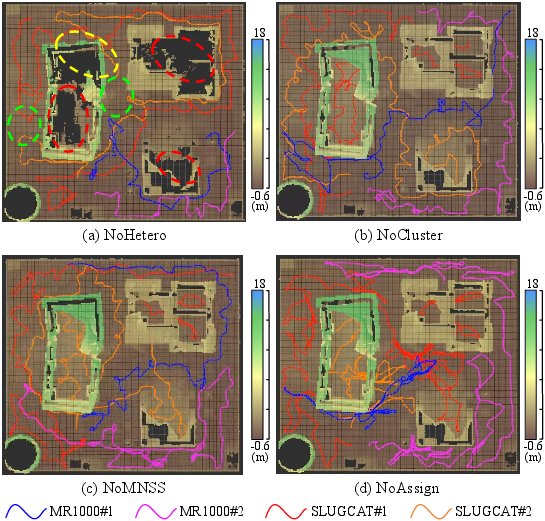
Figure 14: Effects of ablated modules on reconstructed maps and multi-robot trajectory partitioning.
Field Deployment
Real-world experiments in large-scale building–platform environments, with heterogeneous tracked and wheeled robots, validate the robustness and generality of the system. Metrics demonstrate successful division of high-rise facade and indoor coverage between robot types, optimized communication usage, and consistent, efficient exploration in an unconstrained networked setting.
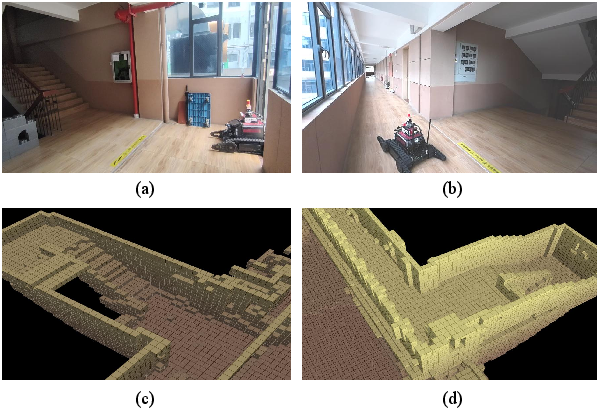
Figure 15: Indoor scene mapping results and robot entry/corridor navigation within a real building, representing diverse traversability and sensor requirements.
Implications and Future Directions
The paper demonstrates the feasibility and practical benefits of fully decentralized, capability- and constraint-aware exploration in mixed-reality 3D environments. Key implications include:
- Practicality in communication-constrained or infrastructure-poor settings: Efficient high-level map abstraction and incremental communication protocols accommodate multi-robot exploration in urban disaster or remote field scenarios.
- Scalability to more complex, multi-modal teams: The framework's abstraction—in both mapping and capability modeling—supports extension to teams with provided semantic, aerial, or manipulator-equipped robots.
- Potential for integration with semantic SLAM and dynamic task reallocation: Explicit storage of terrain and observation metrics can be naturally extended with semantic features for higher-level tasking and cross-team adaptation.
Further extensions may incorporate richer perception cues (e.g., object categories), dynamically optimize communication strategies, and support cross-domain robot teams (including aerial/amphibious agents), advancing toward full autonomy in large-scale, structure-unknown environments.
Conclusion
This paper presents an integrated, decentralized collaborative planning system that combines capability-aware perception, abstract supervoxel map fusion, and robust genetic assignment for heterogeneous 3D multi-robot exploration. Empirical results conclusively demonstrate advantages in efficiency, scalability, and communication minimization, marking a significant advance in fieldable heterogeneous robot collaboration (2604.23693).