- The paper introduces LEGO as a unified, skill-based platform that decomposes RTL design flows into modular, reusable steps.
- It employs a finite state machine and seven-field skill specifications to orchestrate LLM agent workflows with submillisecond text-based retrieval.
- Empirical results show significant gains, with up to 80.5% improvement in Pass@1 on unsolved VerilogEval v2 tasks through composed skill pipelines.
Automated digital front-end design, particularly RTL generation and debugging, presents significant complexity due to the tightly coupled nature of hardware description languages (HDLs) like Verilog. Existing LLM-based EDA agents operate as isolated, project-specific solutions, which hinders infrastructure reuse and propagation of robust design/debug strategies. The paper introduces LEGO, a unified, skill-based platform designed to modularize the digital front-end flow into discrete, reusable steps, enabling composable agent capabilities and cross-project integration.
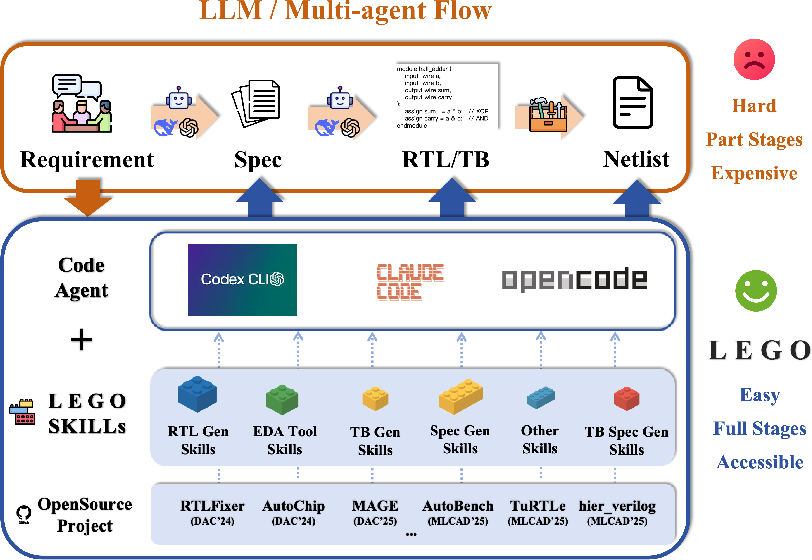
Figure 1: Lego System Overview illustrating six-step decomposition and skill-based orchestration of agent workflows across the digital front-end design pipeline.
LEGO's architecture is predicated on identifying atomic circuit skills from 11 open-source projects across 100+ surveyed papers, curating them into a library of 42 standardized skill units. These units are expressed as seven-field specifications covering function, constraints, entrypoint, I/O, schema, and completion criteria to ensure compatibility and extensibility. The system leverages agentic retrieval (Agent Skill RAG) using lightweight text-based retrieval for debugging and design experience accumulation—eschewing embedding models for submillisecond performance.
Skill Extraction and Modular Workflow
LEGO decomposes the RTL generation pipeline into six sequential steps: RTL Spec Generation, Testbench Spec Generation, RTL Generation, Testbench Generation, EDA Tool Interactions, and Miscellaneous Utilities. Each workflow state is modeled as a finite state machine, which allows systematic modularization of agent capabilities and precise orchestration of step transitions based on EDA tool feedback.
The Circuit Skill Builder automates skill extraction via three stages: summarization of project capabilities, mapping to defined workflow steps, and post-processing for standardization and deduplication. The extracted skills are organized into 24 functional groups, each tailored for interchangeability and composability within their respective workflow stage. The design ensures that skills derived from heterogeneous projects can be combined in plug-and-play fashion without infrastructural friction.
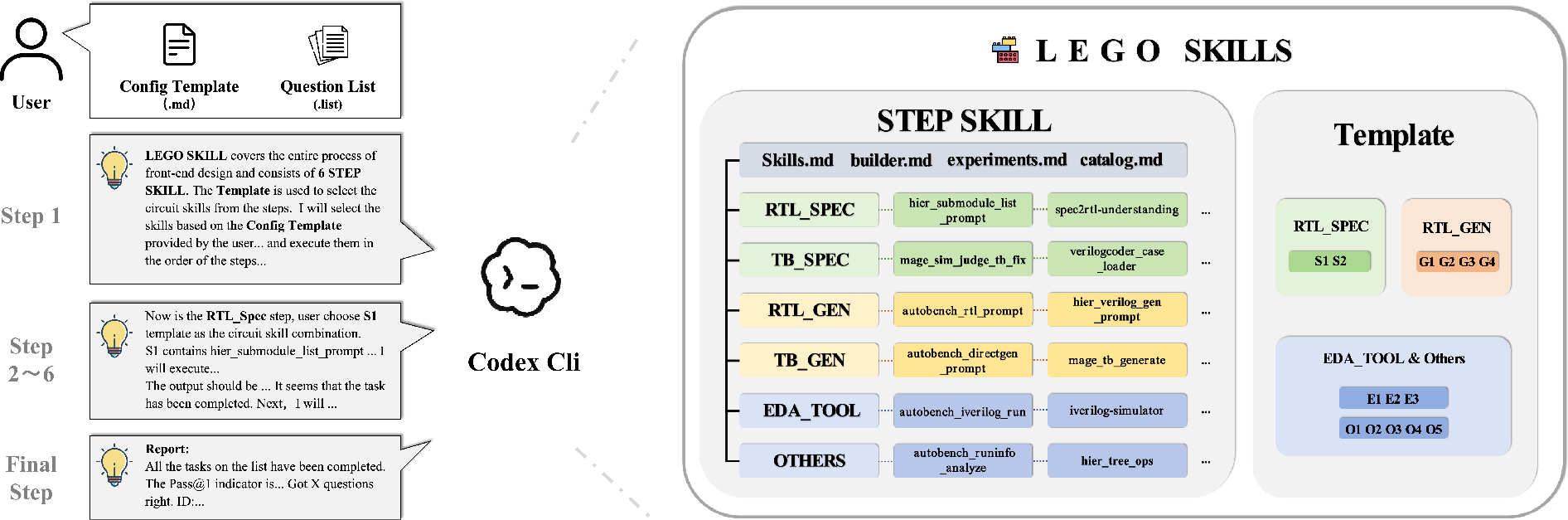
Figure 2: Step-level view of the LEGO methodology, detailing hierarchical skill decomposition and template-based configuration for workflow orchestration.
Hierarchical skill composition is facilitated by three system layers: the top-level workflow orchestration, the six-step skill configuration, and the atomic circuit skills (including debugging skill RAG entries). Templates permit rapid initialization for different classes of design problems and flexible activation/deactivation of specific skills for bespoke workflows.
Empirical Evaluation and Numerical Results
The effectiveness and adaptability of LEGO's modular architecture are validated on a challenging subset of VerilogEval v2, comprising 41 tasks unsolved by gpt-5.2-codex under extra-high reasoning effort. Evaluation is conducted using Codex CLI, with each circuit skill tested directly from their open-source repositories to preserve authentic execution semantics.
Single skill group additions (e.g., G1/G2: RTL Generation) yield substantial gains: Pass@1 increases by 56.1% and 61.0% respectively over the baseline (which is zero). Incorporation of loop-enabled debugging skills (E2/E3), leveraging Agent Skill RAG for iterative repair, further elevates Pass@1 to 0.805—a gain of 80.5%.
Cross-project skill compositions are examined for functional complementarity and robustness. For instance, S1G4 (hierarchy-verilog workflow) is augmented with debugging loops from spec2rtl and RTLFixer, yielding up to a 29.3% gain over S1G4 and outperforming hierarchy-verilog by 14.6% and VerilogCoder by 2.5%. Notably, these composed settings match the state-of-the-art (SOTA) performance of MAGE, demonstrating that modular skill construction transcends the capabilities of its source components when orchestrated in LEGO.
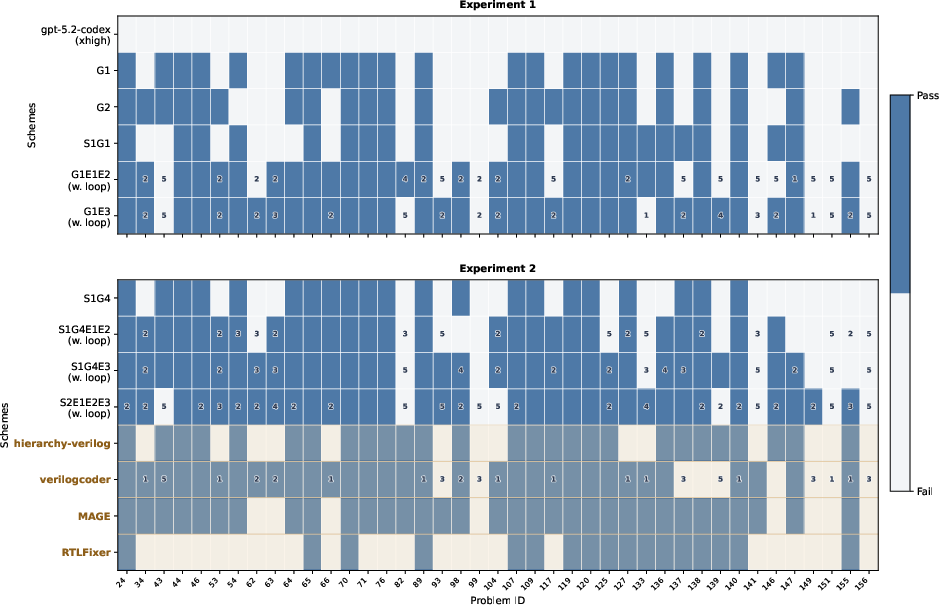
Figure 3: Per problem pass/fail heatmap for Experiments 1 and 2 over 41 filtered VerilogEval v2 problems, visualizing empirical gains from single and composite skill pipelines and highlighting iterative correction loops.
The heatmap in Figure 3 distinctly shows that iterative executions are generally limited in count, indicating effective repair with minimal cycles. The solved problem distribution is broad, confirming that complementary skills address disparate failure modes.
Implications and Future Directions
Practically, LEGO establishes a reusable framework for rapid, robust RTL design automation, minimizing repeated engineering and fostering propagation of empirically validated strategies across projects. Theoretically, its modular decomposition reveals the necessity for granular, step-aware atomization of agent skills in complex domain-specific workflows where single-shot prompting cannot suffice due to context heterogeneity and sequential dependencies.
The paradigm shift towards skill-based abstraction is aligned with the evolution of code agent platforms (Codex CLI, Claude Code, OpenCode), and is bolstered by emerging skill marketplaces hosting thousands of daily updated agent skills. Standardized interfaces facilitate cross-project reuse, composability, and rapid adaptation, particularly critical in document-heavy chip design domains.
Future research trajectories include expanding skill libraries with finer-grained verification, intelligent skill selection via meta-learning, integration with broader EDA flows (e.g., synthesis and backend), and enhanced debugging via multimodal feedback. Continued advances in LLM agentic capabilities, coupled with standalone platform extensibility, will further cement a skill-based architecture as the dominant paradigm in AI-assisted hardware design.
Conclusion
LEGO introduces an extensible, skill-based orchestration mechanism for digital front-end design generation via LLM-powered agents. By modularizing the workflow and aggregating standardized skills from diverse, open-source sources, LEGO achieves substantial empirical gains on unsolved VerilogEval v2 tasks. Composed skill pipelines match or exceed existing SOTA methods, validating the efficacy and flexibility of modular, reusable, agentic architectures for robust RTL design automation. The system is poised for broad adoption and further expansion as skill marketplaces and agent platforms continue to mature.