- The paper presents an order-theoretic framework that formally captures Pareto-optimal trade-offs using compositional design principles.
- It introduces an online learning protocol with safe elimination, reducing costly evaluations by propagating optimistic bounds.
- Empirical results on synthetic and real-world benchmarks show up to 3x performance gains over state-of-the-art multi-objective optimization methods.
The paper "Compositional Online Learning for Multi-Objective System Co-Design" (2604.22624) establishes a rigorous order-theoretic framework for multi-objective system design, emphasizing compositionality, partial orders, and antichains to capture sets of Pareto-optimal trade-offs between functionalities and resources. Unlike scalarization or Euclidean reduction, system-level design is modeled directly on arbitrary posets, enabling reasoning about coupled subsystems and their interfaces within multigraph-structured co-design diagrams.
Definitions for monotone maps, antichains, lattice operations, and upper closures enable canonical representation of non-dominated solutions, forming the foundation for the compositional approach. The mapping between implementations, functionalities, and resources is via monotone relations, preserving native order structures and ensuring compositional reasoning across interconnected subsystems.
Online Multi-Objective Learning and Elimination-Based Sampling
The paper introduces a formal online learning protocol where an agent sequentially queries candidate implementations from an unknown subsystem. The objective is to recover the antichain of non-dominated, target-feasible resource trade-offs with minimal expensive evaluations, guided by the order structure of functionalities and resources.
Optimistic evaluators are constructed as history-dependent lower bounds for required resources and upper bounds for provided functionalities. The agent employs these evaluators to safely eliminate candidate implementations before incurring costly evaluations based on two criteria: (a) optimistic resource bounds are already dominated by the current antichain or (b) optimistic functionality bounds fail to satisfy the target.
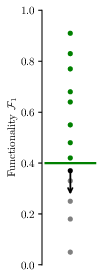
Figure 1: Example for an implementation DarkOrange2i eliminated by optimistic evaluation; left: functionality filtering, right: antichain dominance in the resource lattice.
The induced admissible set shrinks monotonically as information accumulates due to the monotonicity of the evaluators, guaranteeing sound elimination. The rejection sampler algorithm focuses evaluation budget on candidates that remain potentially informative, achieving safe elimination and monotone tightening.
Structural instantiations are given for monotonicity, Lipschitz continuity, and linear-parametric settings. For monotone resource maps, optimistic lower bounds are propagated via join operations over queried predecessors; for Lipschitz maps, bounds exploit local smoothness; for linear models, the confidence set over parameter vectors tightens with accumulated data.
Compositional Propagation and Multigraph System-Level Reasoning
Extending to compositional multi-block co-design, the framework leverages local optimistic evaluators in the expensive subsystem and propagates these through the tractable remainder of the multigraph-based system via monotone operators and fixed-point computation. The completion set for a candidate in the expensive block is solved over the tractable part, yielding propagated optimistic system-level resource antichains.
Safe elimination is possible at the system level via the propagated antichain: if all completions are dominated by the current antichain, the local candidate can be discarded. Monotonicity in history ensures that admissible sets shrink for both local and compositional settings, yielding correctness guarantees for the elimination sampler in the multigraph framework.
Numerical Experiments: Synthetic and Realistic Co-Design Case Studies
The paper benchmarks the approach against leading multi-objective evolutionary algorithms (MOEA/D, NSGA-III, RVEA, KGB), Bayesian optimization (qLogEHVI), and structure-free sampling (Halton sequence). Experiments span synthetic monotone and Lipschitz settings, as well as realistic co-design problems (intermodal mobility and heterogeneous multi-agent fleet design).
On synthetic monotone and Lipschitz benchmarks, elimination-based online learning achieves the lowest cumulative hypervolume difference (HVD) across nearly all tested instances, outperforming evolutionary and Bayesian baselines by margins up to 3x. The improvement over Halton demonstrates the value of structural elimination beyond uniform coverage.
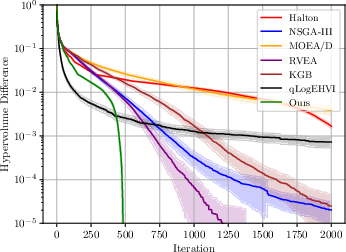
Figure 2: Hypervolume difference HVD vs. iterations for intermodal mobility co-design; structural elimination substantially reduces budget for exact Pareto recovery.
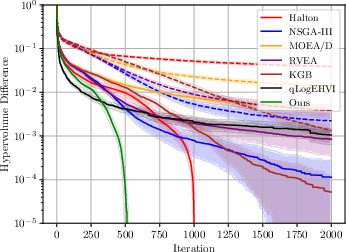
Figure 3: HVD vs. iterations for heterogeneous multi-agent system co-design; the compositional algorithm improves over quasi-random search and evolutionary baselines.
In real-world co-design benchmarks, the structural elimination method achieves rapid exact Pareto recovery with far fewer expensive evaluations. Ablation studies show robustness to mild model misspecification via relaxed rejection rules, and per-step CPU time remains two orders-of-magnitude below the cost of a single co-design simulation.
Theoretical and Practical Implications
The proposed framework enables modular, sample-efficient online learning directly over compositional systems with possibly partially ordered, heterogeneous interfaces. The order-theoretic paradigm allows integrating continuous and discrete components, propagating subsystem-level optimism to system-level feasibility certificates, and focusing evaluation resources on informative candidates.
Implications include:
- Rigorous guarantees for safe elimination and monotone tightening, independent of particular performance metrics.
- Substantial reduction in sample complexity for expensive simulations, critical for engineering domains such as mobility planning and robotics.
- A formal pathway for integrating structural knowledge (monotonicity, smoothness, linearity) into practical system design optimization workflows.
Future Directions
Open problems identified include the derivation of quantitative sample complexity bounds for admissible set shrinkage, extension to coordinated exploration across multiple expensive subsystems, incorporation of stochastic confidence bounds for noisy evaluations, and development of advanced acquisition strategies (e.g., information-directed sampling, pessimistic prioritization).
Conclusion
The paper sets forth a compositional, order-theoretic framework for online multi-objective system co-design, providing algorithms and guarantees for optimally efficient exploration under structural assumptions and in compositional diagrams. Empirical and formal results demonstrate significant gains in sample efficiency for expensive design domains, with broad applicability to modular engineering systems and multidisciplinary optimization.