- The paper introduces a lightweight, open-source tool that generates cinematic and ego-centric 3D traffic visualizations directly from SUMO outputs.
- It employs a robust five-step trajectory smoothing pipeline to ensure realistic, continuous vehicle motion in simulated traffic scenes.
- The tool offers full scriptability, minimal setup, and diverse customizable rendering modes, enhancing research reproducibility and human-centered evaluations.
sumo3Dviz: A Lightweight 3D Traffic Visualization Pipeline for SUMO
Motivation and Positioning
sumo3Dviz addresses a significant gap in traffic microsimulation postprocessing: conventional numerical outputs and 2D visualizations from SUMO (Simulation of Urban Mobility) lack perceptual depth, limiting their suitability in applications where human-centered evaluation, intuitive interpretation, and effective communication are required. This limitation is acute in fields such as mobility psychology, acceptance research, and virtual experience stated-preference experiments, which demand visual stimuli that closely approximate real-world perception. Existing 3D visualization solutions are either based on proprietary, resource-intensive game engines or lack reproducibility and automation capabilities. sumo3Dviz is introduced as a lightweight, scriptable, open-source tool capable of batch-producing cinematic and ego-centric 3D traffic scenes directly from standard SUMO outputs, requiring minimal setup and no proprietary dependencies.
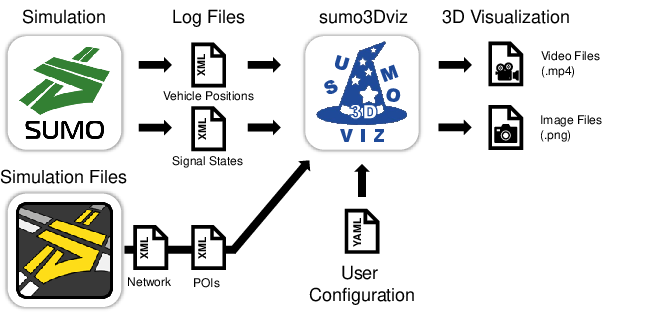
Figure 1: The sumo3Dviz workflow demonstrates the direct conversion of SUMO simulation logs into rendered 3D traffic videos.
Currently available 3D traffic visualization solutions for SUMO vary considerably in terms of realism, usability, platform independence, integration effort, and reproducibility. Game-engine based integrations (Sumo2Unity, Sumo2Unreal, CARLA+SUMO) deliver photorealistic outputs suitable for digital twin applications and immersive VR, but at the cost of complex conversion pipelines, proprietary dependencies, and high resource demands. Native SUMO visualizations and lightweight tools like SumoNetVis remain confined to 2D, lacking perceptual richness required for user studies. Emerging academic prototypes (SUMO3D, Traffic3D, Sumonity) often suffer from installation hurdles, scattered documentation, and restricted scripting interfaces. Commercial solutions (VISSIM, AIMSUN) are mature and visually robust but closed and non-reproducible.
sumo3Dviz uniquely offers direct SUMO compatibility, pip-installability, open-source license, platform independence, fully scriptable batch processing, and both cinematic and ego-centric perspectives—features currently unmatched in a single solution.
Software Architecture and Workflow
sumo3Dviz is architected as a self-contained Python package, operating exclusively on standard SUMO simulation inputs and outputs, independent from co-simulation or external rendering frameworks. The pipeline encompasses input parsing, trajectory interpolation and smoothing, scene graph construction, and high-resolution video rendering. Its configuration utilizes YAML files, enabling reproducible batch processing and integration with automated experimentation workflows. Both CLI and Python module APIs are provided for accessibility and extensibility.
Visual customization is granular—textures for sky and ground, color schemes, vehicle models, static object placement, and camera behaviors are all configurable, with a library of open-source assets provided. The rendering pipeline supports four primary visualization modes:
- Eulerian (fixed external)
- Lagrangian (ego-centric)
- Cinematic (predefined trajectory fly-through)
- Interactive (user-controlled static navigation)

Figure 2: Library of available sky and ground textures provides customizable visual styling for diverse simulation contexts.
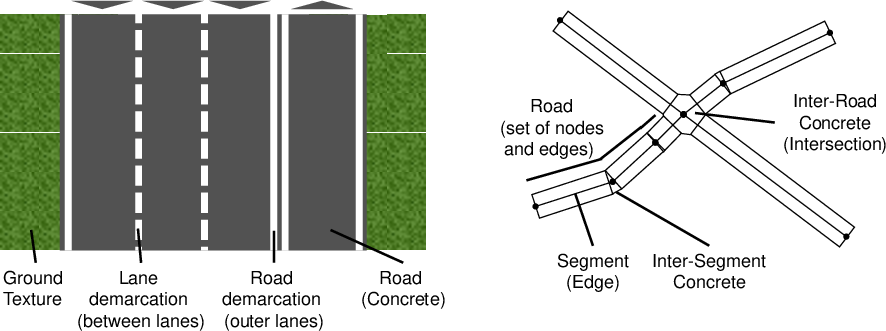
Figure 3: Schematic of the road network rendering process, combining layered structure and geometric extraction from SUMO definitions.
Scene Graph and Environmental Context
The sumo3Dviz scene graph is composed of customizable nodes, including camera, light sources, textured sky spheres, ground planes, road polygons, static objects (trees, buildings, traffic lights, fences), and moving vehicle entities. Road networks are rendered from SUMO configuration files, utilizing polygon overlays for intersections and lane demarcation lines for delineation.
Static objects such as vegetation and urban infrastructure are placed using SUMO polygon and POI files, edited with netedit for reproducible spatial context.
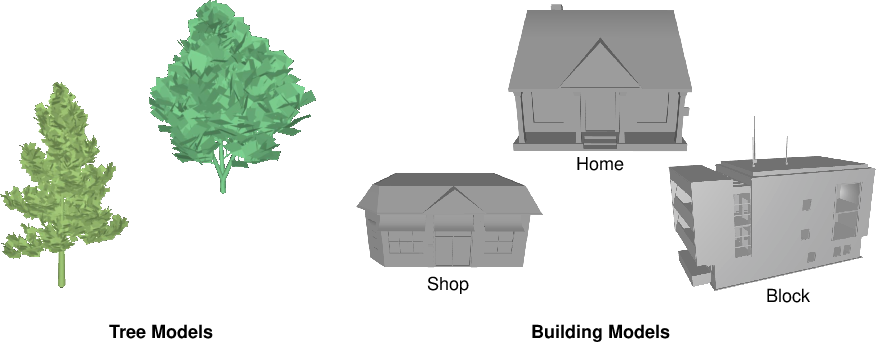
Figure 4: Available static models for environmental context, including trees and building structures.
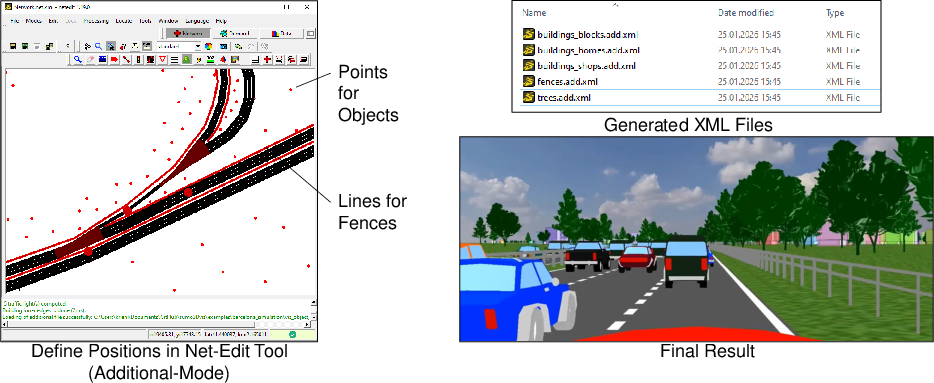
Figure 5: Static object spatial placement using SUMO netedit POI editing interface.
Traffics lights are visually synchronized with simulation log signal states, with designs for standard two-head, three-head, and digital countdown variants.

Figure 6: Supported traffic light designs, each rendering real-time signal states with optional cycle interpolation.
Vehicles are visually instantiated using a set of ten open-source models, randomly assigned for perceptual diversity in traffic scenes.
Figure 7: Visual repertoire of car models utilized in sumo3Dviz for diverse vehicle representation.
Trajectory Interpolation and Smoothing Methodology
To overcome the challenge of discrete, low-frequency simulation outputs (e.g., 1 Hz), sumo3Dviz applies a five-step trajectory smoothing pipeline:
- Angle Unwrapping: Resolves discontinuities at the 0∘/360∘ boundary.
- Linear Interpolation: Upsamples trajectories to match the rendering framerate (e.g., 25 Hz).
- Rolling-Window Smoothing: Applies centered moving average to reduce unnatural linearity, using empirically optimized window sizes (e.g., L=21).
- Velocity-Based Orientation Estimation: Computes smoothed vehicle orientation using tangential velocity vectors, augmented with stability heuristics for low-movement cases.
- Final Smoothing: Additional moving average for orientation, resulting in visually coherent, physically plausible vehicle movement.
This methodology ensures that rendered traffic scenes exhibit continuous, natural motion, critical for perceptual studies.
Case Study: Ronda de Dalt Highway, Barcelona
A demand-calibrated SUMO simulation of Barcelona's Ronda de Dalt urban highway demonstrates sumo3Dviz’s capabilities. The simulated network (approx. $6.5$ km, three lanes per direction, multiple ramps, and residential areas) covers morning peak traffic and includes hypothetical ramp metering signals. Environmental context was enriched with static objects via SUMO POI files. The rendering process achieves video frame generation in $100-500$ s per frame on commodity hardware, with initial loading under $20$ s.
Visualizations were produced in all modes: fixed Eulerian overviews, Lagrangian driver perspectives, cinematic fly-throughs, and interactive static navigation.
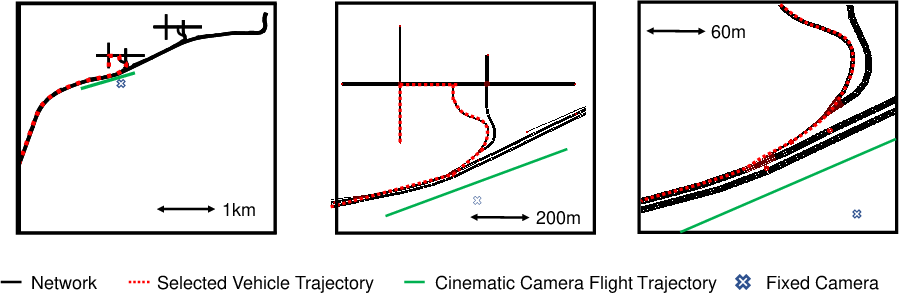
Figure 8: Network geometry of the simulated Ronda de Dalt, illustrating on/off ramps and residential context.
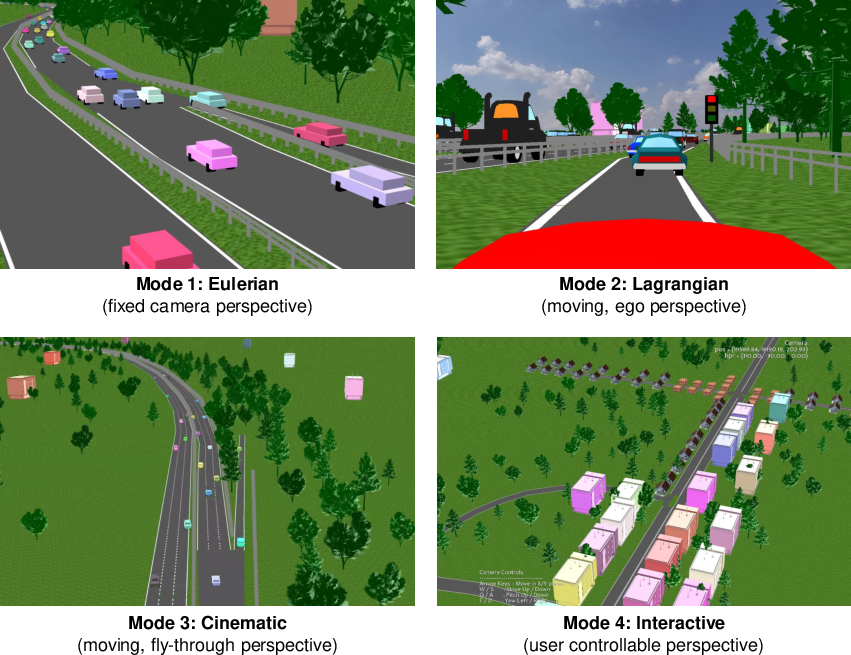
Figure 9: Representative visualization outputs for each sumo3Dviz rendering mode.
Practical and Theoretical Implications
sumo3Dviz's direct compatibility with standard SUMO outputs, high configurability, and low setup requirements make it suitable for integration into large-scale research pipelines, educational demos, and automated user studies. Its interpolation and smoothing logic for discrete vehicle trajectories is essential for any perceptual evaluation or human-centered assessment. The tool enables realistic virtual traffic environments without the burden of game-engine integration, facilitating reproducible experimental design and rapid scenario iteration.
On a theoretical level, sumo3Dviz's flexible scene graph and rendering methodology serve as a foundation for further development toward perceptual simulation of traffic systems, digital twin visualization, and human-in-the-loop studies. The open modularity paves the way for integration of AV sensor emulation, advanced human factors research, and large-scale stated preference experiments.
Conclusion
sumo3Dviz delivers an open-source, light-weight, and platform-independent solution for 3D traffic visualization of SUMO microsimulations. Its emphasis on intuitive, reproducible scene rendering—supporting both cinematic and ego-centric perspectives—clarifies traffic dynamics in ways not feasible with conventional 2D visualization or resource-intensive game-engine platforms. The tool’s trajectory smoothing and visual customization provide perceptually realistic motion and environmental context, broadening applicability in research, teaching, and human-centered mobility studies. Future extensions may include real-time rendering, sensor integration for AV studies, and virtual reality interfaces, further enabling advanced experimentation and perceptual traffic analysis.

