- The paper introduces a framework that fuses offline computed HJ value functions with online A* search to enable real-time, safe indoor navigation.
- It leverages Time-to-Reach (TTR) heuristics and Backward Reachable Tubes (BRT) for improved guidance and proactive pruning of unsafe states.
- Simulations and real-world experiments demonstrate substantial reductions in node expansions and effective collision avoidance in static and dynamic setups.
Hamilton-Jacobi Reachability-Guided Search for Efficient and Safe Indoor Planar Robot Navigation
Introduction and Motivation
The paper "A Hamilton-Jacobi Reachability-Guided Search Framework for Efficient and Safe Indoor Planar Robot Navigation" (2604.17679) addresses the long-standing challenge of achieving real-time, safe, and dynamically feasible indoor navigation in environments with static obstacles and moving agents. The authors integrate offline Hamilton-Jacobi (HJ) reachability analysis with online graph search-based planning, leveraging the optimality and safety guarantees of control-theoretic value functions while amortizing their intense computational demands through precomputation. Graph search algorithms such as A* provide theoretical guarantees and interpretability but suffer from complexity with increasing dimensionality. HJ reachability, particularly Time-to-Reach (TTR) and Backward Reachable Tubes (BRTs), offers principled metrics for goal-reaching and safety but has historically been impractical for online deployment due to environmental specificity and computational burden.
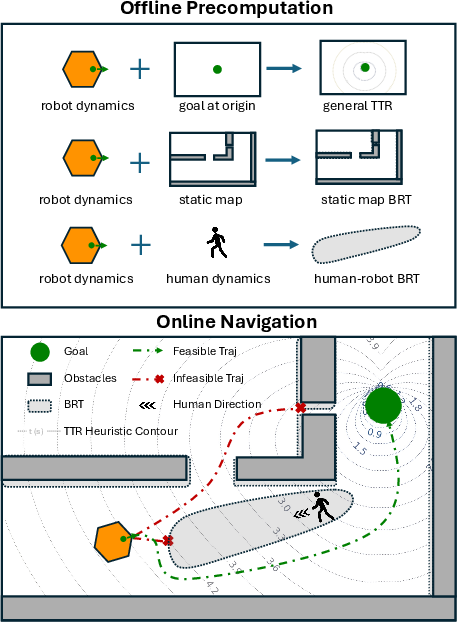
Figure 1: The proposed offline/online HJ reachability-guided framework, illustrating the integration of precomputed TTR and BRT value functions into the search process for efficiency and safety.
Structural Framework and Reachability Integration
The core contribution is a structural framework that embeds three precomputed HJ value functions into the online graph search:
- General TTR: Provides dynamics-informed heuristic guidance.
- Static-map BRT: Prunes predictively unsafe regions relative to static obstacles.
- Human-robot BRT: Facilitates predictive pruning of unsafe human-robot interactions in dynamic environments.
Heuristic Design: TTR Versus Conventional Metrics
TTR-based heuristics encode the actual minimum-time cost-to-go for the robot under its dynamics, offering substantial improvement over naive distance-based heuristics. Unlike map-specific TTR, general TTR is environment-agnostic and reusable across goals and configurations, albeit without explicit obstacle avoidance. However, this potential misguidance is compensated by the static-map BRT pruning in the integrated search process. Comparisons illustrate the hierarchy:
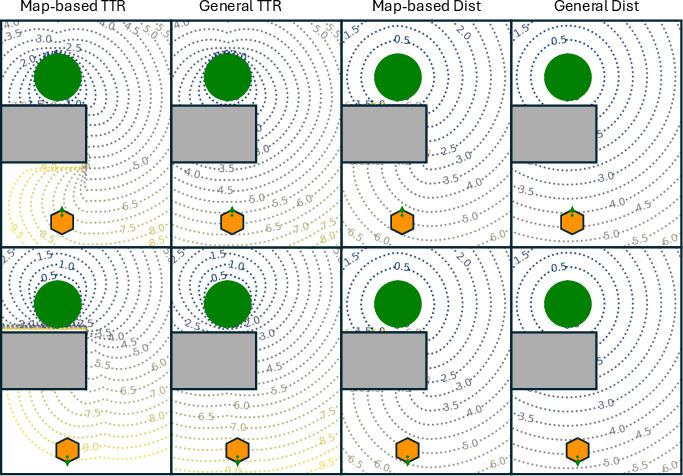
Figure 2: Contours and comparative values for map-based TTR, general TTR, map-based Dist, and general Dist heuristics, demonstrating the dominance of dynamics-aware strategies.
BRT-Based Safety Pruning Mechanisms
The static-map BRT identifies states that, given dynamics, are predestined to collide with static obstacles within a prescribed horizon. Pruning based on BRT is notably more informative than instantaneous collision checks; it proactively removes states with insufficient avoidance margin. Node pruning is parameterized by the BRT value threshold, accounting for real-world imperfections and delays.
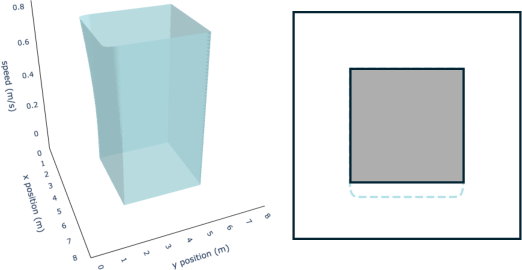
Figure 3: Visualization of a static-map BRT, showing increased unsafe regions at higher robot velocities and the complex spatial structure of reachable tubes.
Human-Robot BRT and Forward-Invariant Safety
For dynamic scenarios, human-robot BRTs are constructed in relative state space via pursuit-evasion differential games. The novel forward-invariant (FI) pruning approach employs the time derivative of the reachability value function, allowing the planner to anticipate violations of safety margins with greater temporal foresight. Adaptive tuning of the invariance parameter (α) based on real-time risk—distance and angular alignment—yields a trade-off between conservativeness and flexibility.
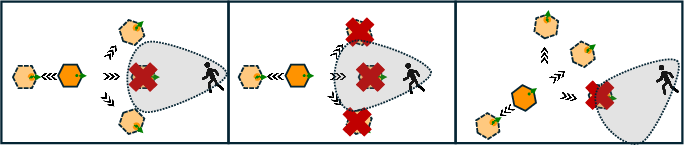
Figure 4: Influence of heading angle and relative distance in FI-BRT pruning; adaptive pruning prevents latency-induced safety violations.
Simulation: Quantitative Evaluation
Heuristic Efficiency
Simulation results show that replacing distance-based heuristics with TTR substantially reduces node expansion counts—by a factor of over 20 in some settings—without degrading optimality. In computational terms, even highly optimized planners (e.g., Nav2 SmacPlanner) cannot achieve real-time requirements using geometric heuristics alone in higher-dimensional searches.
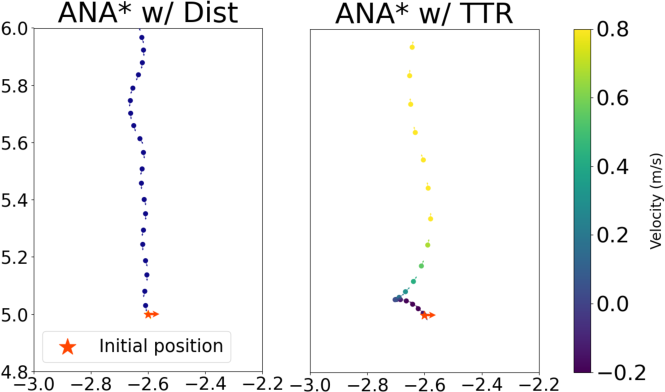
Figure 5: Left—ANA
with Dist heuristic yields persistently backward trajectories; Right—ANA* with TTR heuristic enables sophisticated reorientation and smooth goal approach.*
BRT Pruning Robustness
The static-map BRT pruner significantly improves search efficiency and success rates compared to geometry-only baselines. For ANA* planners, the BRT pruner eliminates infeasible trajectories more robustly, preventing late-stage failures by denying risky nodes during early search stages.
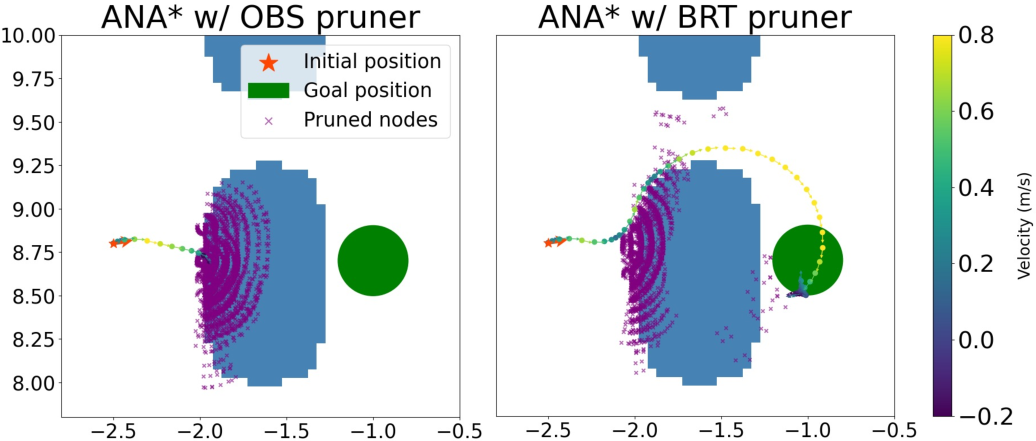
Figure 6: Left—OBS pruner fails by allowing approaches too close to obstacles, while right—BRT pruner proactively trims dangerous paths, ensuring feasible solution discovery.
Ablation and Large-Scale Trial
Synergistic integration of TTR and BRT approaches yields the highest efficiency and path quality across 100 randomly sampled scenarios. TTR enhances search guidance, BRT guarantees safety and feasibility; their combination maximizes success rates and minimizes computational overhead.
Dynamic Environment: Human Interaction
In dynamic settings, the FI-BRT outperforms feasible-set or reactive pruning approaches, avoiding collisions in scenarios where late or instantaneous response is inadequate. The adaptation of safety invariance and prediction horizon yields different tradeoffs: FI-BRT is more conservative (robust, higher travel time), FS-BRT is more efficient but lacks infinite-horizon guarantees.
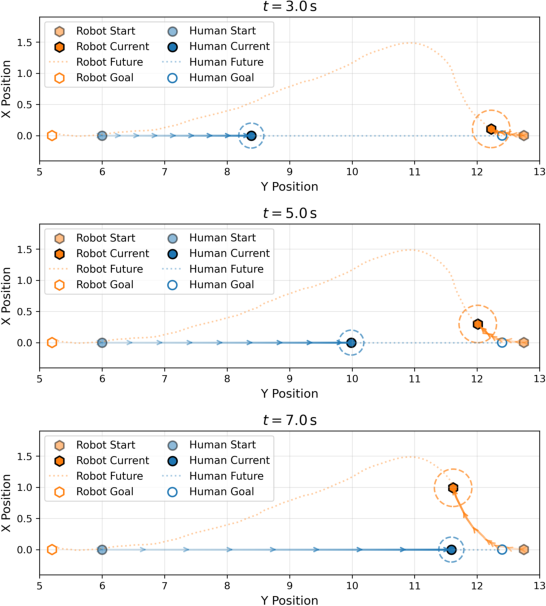
Figure 7: FI-BRT enables early and successful circumvention of humans; snapshots show incremental avoidance behavior in the face-to-face scenario.
Real-World Experiments
Real-world deployment in static (Long Hallway, Dense Room) and dynamic environments confirms simulation findings. The TTR heuristic is essential for long-range navigation; the BRT pruner ensures safe passage through dense clutter. In dynamic tests, FI-BRT prevents collisions with unpredictable human agents, albeit at the cost of increased navigation times. Offline precomputation times are substantial but enable amortized, efficient online operation.
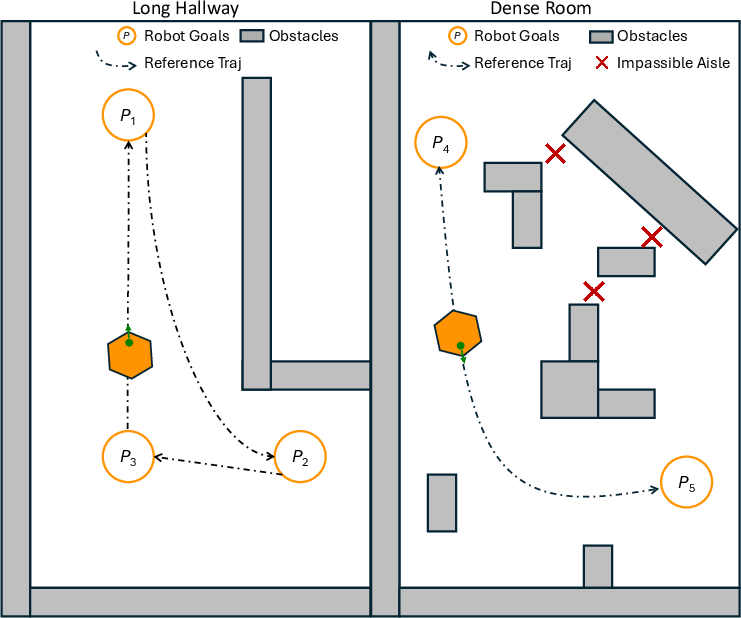
Figure 8: Environment layouts for Long Hallway and Dense Room; correspondence with real-world constraints illustrated.
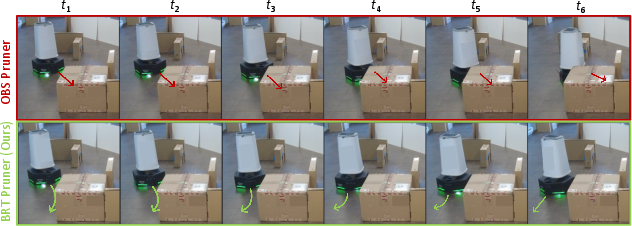
Figure 9: Time-step comparisons of OBS versus BRT pruners; BRT correctly identifies and eliminates hazardous nodes, facilitating safe and successful navigation.
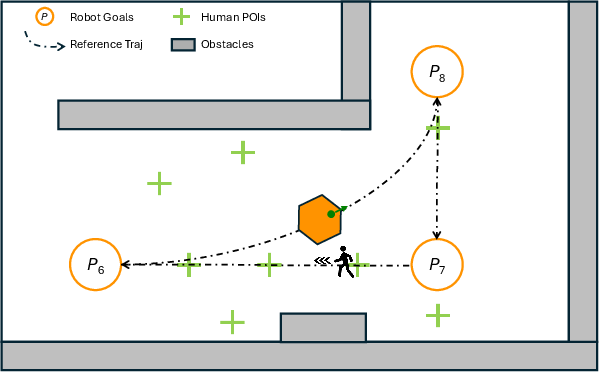
Figure 10: Dynamic environment testbed with multiple human POIs; the planner adapts in real-time to unpredictable motions, maintaining safety.
Implications and Future Directions
From a theoretical perspective, the integration of HJ reachability value functions as structural guidance and safety mechanisms in graph search concretizes a bridge between continuous optimal control and discrete motion planning. The offline computation amortizes costs, enabling real-time deployment while retaining rigorous guarantees. Practically, the framework is scalable to low-dimensional robotic systems and robust to real-world model mismatch and observation uncertainty. However, computational intensity of offline value function generation and worst-case assumptions in pursuit-evasion models limit immediate applicability to high-dimensional or richly interactive scenarios. Refinement of adaptive safety models and scalable reachability computation will be foundational directions for extending this approach to more complex, unstructured environments and richer multi-agent contexts.
Conclusion
The paper introduces an authoritative framework for efficient and safe indoor planar navigation that fuses offline HJ reachability analysis with online graph search. Precomputed TTR and BRT value functions provide global dynamics-aware heuristics and predictive safety pruning, yielding substantial improvements in computational efficiency, path optimality, and collision avoidance in both static and dynamic, human-populated environments. Real-world experiments corroborate simulation claims and demonstrate practical viability. Limitations include computation time and conservative safety margins, suggesting future work in scalable reachability and nuanced human interaction models. The methodology extends the theoretical toolkit available for safe robot navigation and is poised to inform future advances in real-time, safety-critical autonomous systems.

