- The paper presents a novel analytical SDF primitive (XPSQ) and vectorized algorithm for efficiently constructing smooth, differentiable contact manifolds.
- It employs sphere tracing and softmax-based fusion to handle edge-SDF intersections and contact aggregation, overcoming limitations of convex decomposition.
- The approach achieves order-of-magnitude speedups and reduces primitive count, paving the way for scalable, contact-rich robot simulation and control.
Introduction
Contact-rich robot control demands simulation pipelines capable of producing gradients and Hessians for contact dynamics, crucial for advanced optimization and learning methods. However, current mainstream approaches in robotics simulation—dominated by convex primitive decompositions for contact generation—are fundamentally non-smooth and ill-suited to efficiently producing physically meaningful derivatives in key pathological scenarios. The paper "Novel Algorithms for Smoothly Differentiable and Efficiently Vectorizable Contact Manifold Construction" (2604.17538) addresses these limitations through two primary contributions: (1) the formulation of a new analytical signed distance field (SDF) primitive (XPSQ) with high geometric expressivity and efficient differentiability, and (2) a novel vectorized, differentiable contact manifold generation algorithm based on this representation.
Mainstream non-differentiable robot simulators (e.g., MuJoCo, PyBullet, Drake) employ a mesh-to-convex primitive pipeline, followed by convex-convex contact queries, and finally manifold construction based on witness points or polygon clipping. While smoothing techniques—analytical and randomized—exist for gradient estimation through convex-convex queries, the approach is fundamentally limited because:
- Uniqueness breakdown occurs for witness points in parallel planar contacts, leading to poor gradient behavior.
- Manifold coverage is incomplete: constructing contact manifolds from witness points requires non-differentiable steps (buffer management or polygon clipping), which cannot be made efficiently differentiable and vectorizable.
- Combinatorial inefficiency arises due to the need for N×M convex-convex queries and the lack of efficient, differentiable broad-phase culling.
Thus, overcoming these obstacles mandates a new geometry representation and contact manifold algorithm tailored for smoothness and large-scale parallelization rather than simply retrofitting gradients into legacy pipelines.
The XPSQ Primitive: Analytical, Expressive, Differentiable SDFs
The extruded plane-superquadric intersection (XPSQ) primitive constitutes a core technical innovation of the paper. XPSQ enables the analytical definition of complex swept volumes via SDFs, integrating smoothness, parameter efficiency, and geometric richness in a single primitive. The construction builds upon superquadrics (SQs)—which can already parameterize boxes, cylinders, ellipsoids, cones, and more—and generalizes their boundaries by intersecting with an arbitrary number of half-spaces, and then extruding the resulting shape along a quadratic three-dimensional spline with variable orientation, scale, and additional parameters.
The calculation of the SDF of a XPSQ for an arbitrary evaluation point is accomplished as follows:
- Analytically project the query point onto the spline, minimizing squared distance (fourth-order polynomial, analytical roots via Cardano’s formula).
- For each (potentially up to three) projection, compute the SDF of the associated PSQ (plane-intersected superquadric) at that point.
- Fuse the SDF values using a smooth-minimum (log-sum-exp) operation to ensure differentiability w.r.t. both surface and query position.
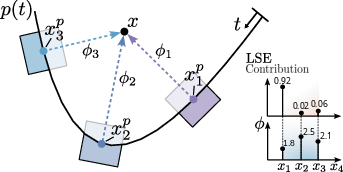
Figure 1: The XPSQ SDF is the smooth-minimum of SDFs associated with analytic projections onto the sweep spline, solved via Cardano’s formula.
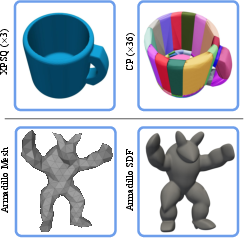
Figure 2: XPSQ primitives can model complex geometries (e.g., mug handles, articulated limbs) with far fewer primitives than convex decomposition.
This approach supports fine-grained control and learning over highly articulated geometries, vastly reducing the quantity of primitives compared to traditional mesh decompositions—an important property for vectorizability and automatic differentiation on modern hardware.
The second contribution is a differentiable and efficiently vectorizable routine for contact manifold construction between a mesh and an SDF. This approach addresses three contact generation operations: edge-SDF intersection, per-face aggregation, and contact information computation.
- Edge-SDF intersection: Instead of iterative root-finding or KKT-based optimization, which are both difficult to vectorize and fraught with discontinuity (from switching optima), the algorithm employs a bounded number of sphere-tracing steps from both edge vertices, smoothly mapping initial points along the edge’s direction to the SDF boundary.
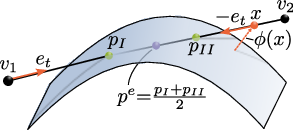
Figure 3: Sphere tracing identifies intersection points along mesh edges with the differentiable SDF.
- Contact fusion: Each mesh face aggregates multiple candidate contact points (vertices, edges) and fuses them via softmax weighting based on penetration depth (using continuous relaxations of comparison and argmax). The contact normals and Jacobians are blended to ensure stability and smoothness, especially in pathological parallel face configurations where witness points alone fail to yield stable simulation.
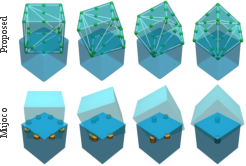
Figure 4: Contact manifold generation yields well-distributed, smoothly adapting contact points, unlike standard polygon clipping.
The proposed methods are evaluated in terms of expressivity, contact stability, and computational efficiency. XPSQs represent non-trivial topologies with a dramatically smaller number of primitives relative to convex decompositions—enabling, for example, a mug with handle to be compactly parameterized by three XPSQs rather than 36 convex pieces. In practical benchmarks, the proposed manifold generation routine achieves order-of-magnitude speedups compared to MJX (MuJoCo XLA), with further gains obtainable by integrating differentiable broad-phase culling. These results support the claim that the methods are conducive not just to differentiation, but to large-scale vectorized simulation on real hardware.
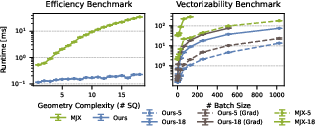
Figure 5: Timing benchmarks demonstrate superior runtime and scalability compared to established simulation baselines.
Limitations and Future Directions
The main limitation identified is the lack of a systematic routine for decomposing arbitrary triangulated meshes into a minimal set of XPSQ primitives. The development of such decomposition pipelines—analogous to existing convex decomposition algorithms but tailored to the differentiability and expressivity of XPSQ—would further unlock the potential of the framework, potentially enabling scalable differentiable simulation and model-based control in highly nonconvex, contact-rich environments.
Conclusion
This work establishes a new differentiable simulation pipeline with implications spanning robotics, physics-based learning, and optimal control. By removing fundamental architectural obstacles innate to convex primitive-based contact generation, it provides a pathway to scalable differentiable robot simulation compatible with large-batch optimization and high-fidelity learning, and establishes technical foundations for future developments in contact-rich, optimization-centric control frameworks. The adoption of analytical, expressive SDF primitives and vectorizable, smooth manifold generation is likely to become increasingly vital as end-to-end differentiable simulation emerges as a prerequisite for advanced robot learning.