- The paper introduces novel cell and path dominance techniques that drastically reduce the search space, achieving over 95% reduction in residual cells.
- It integrates pivot pruning and parallel heuristic computation to enhance mTSP-based lower bounds, resulting in orders of magnitude runtime improvements.
- The work further develops bounded-suboptimal and anytime algorithms, including MxW and focal search variants, to effectively scale multi-agent coverage in real-world scenarios.
Scalable Algorithms with Provable Optimality Bounds for the Multiple Watchman Route Problem
Introduction and Motivation
The Multiple Watchman Route Problem (MWRP) extends the classical Watchman Route Problem (WRP) to multiple agents, each tasked with traversing a structured environment (formulated as a 2D grid or general graph) so that every location is visible from at least one agent’s path. MWRP is motivated by critical multi-robot coverage tasks such as emergency search and rescue and wildfire monitoring, where minimizing the worst-case response time (the makespan) is essential. The optimization of MWRP is computationally challenging; it is known to be NP-hard. Although previous optimal solvers (e.g., MWRP-*) can handle small problem instances, their joint-space heuristic search approach suffers exponential state-space explosion with respect to map size and agent count, limiting practical usability in real-world scales.
Given M agents, a grid C of free cells, a target set U of cells to be seen, starting locations S, a neighbor function N, and a line-of-sight (LOS) function L, the goal is to output a set of agent paths Π={π1,...,πM} such that each s∈U is seen by at least one path and the makespan (maximum path length) is minimized. The LOS and watcher functions are entirely general, enabling arbitrary, possibly non-symmetric, visibility models including Bresenham LOS.
State Space Reduction via Cell and Path Dominance
A core contribution is the introduction of cell dominance and path dominance as formal mechanisms for removing redundant cells from the set of residual cells U considered during search, leading to dramatic search space reduction:
- Cell Dominance: If for cells si,sj, C0, then seeing C1 necessarily implies seeing C2. Thus, C3 can be safely omitted, preserving completeness and optimality (Theorem 1).
- Path Dominance: For given agent starting positions, if all paths to C4 require passing through (or seeing) C5, then C6 is dominated by C7, and C8 may be pruned (Theorem 2).
These techniques are visualized highlighting the pruned cells over various map types.
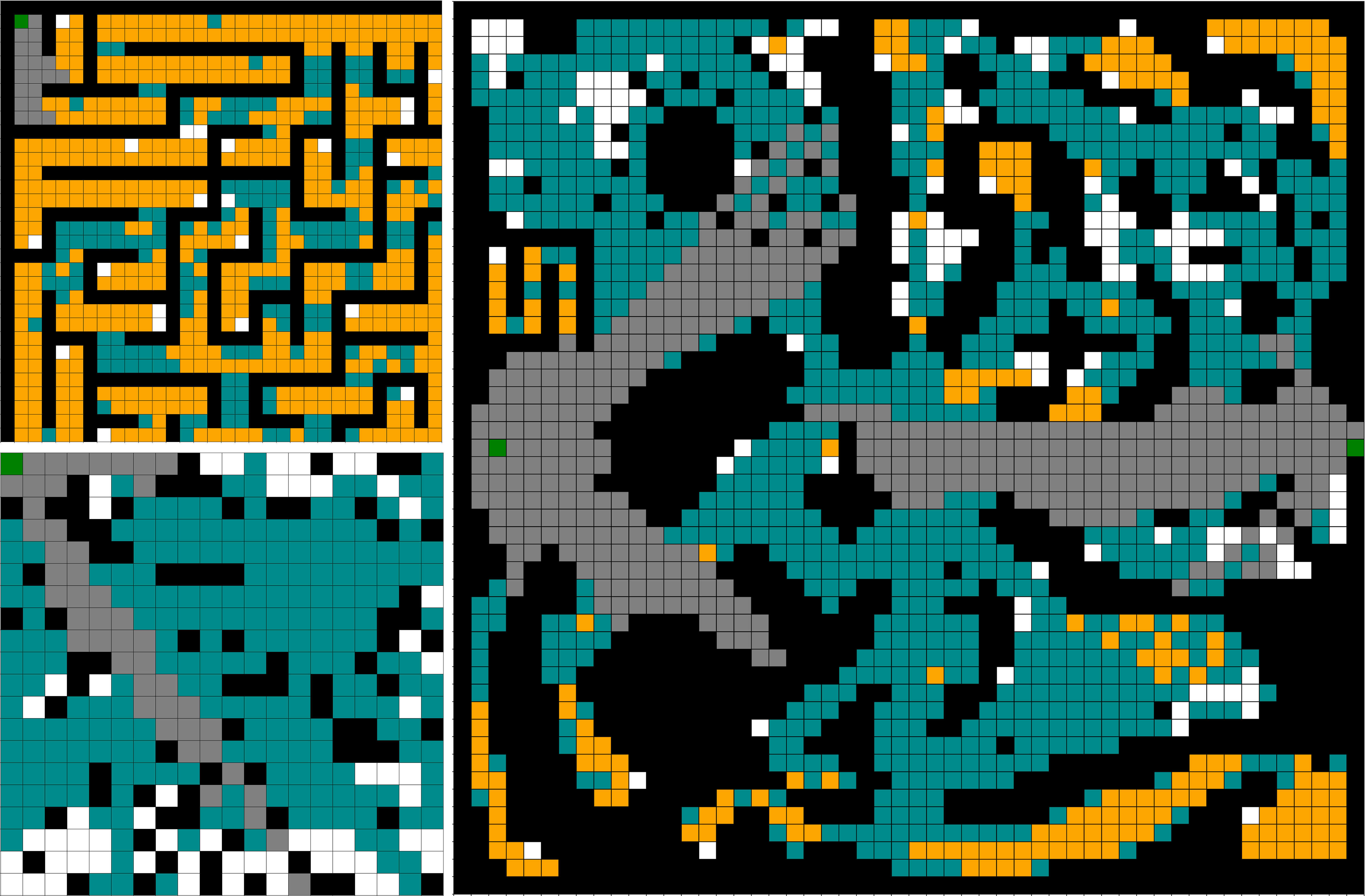
Figure 1: State space reduction via cell dominance (orange) and path dominance (orange + blue) highlighted on various map architectures.
Empirical analysis demonstrates over 95% reduction in C9 (residual cells to cover) on structured maps, with orders of magnitude runtime improvement.
Algorithmic Enhancements: 3
3 is an optimal MWRP algorithm that integrates the following:
- Cell/Path Dominance (CPD): Provides massive reduction of the effective residual subspace prior to search.
- Pivot Pruning: In the mTSP-based heuristic calculation, certain pivots (residual targets) can unintentionally create heuristic shortcuts that reduce informativeness. Selective removal of such pivots sharpens the lower bound provided by the mTSP heuristic, as shown in side-by-side problem/graph comparisons.
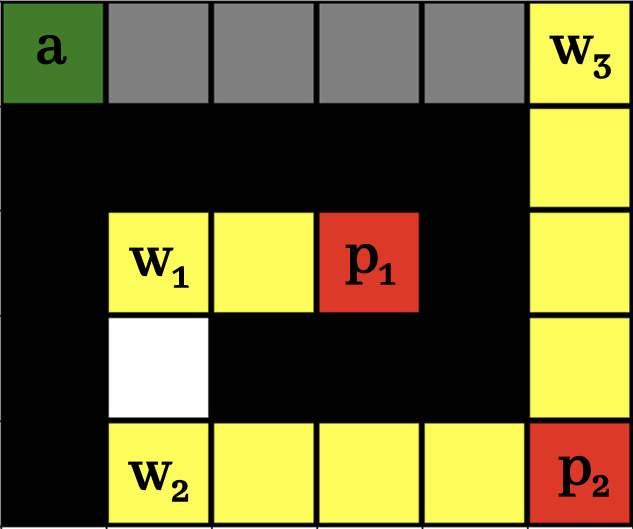
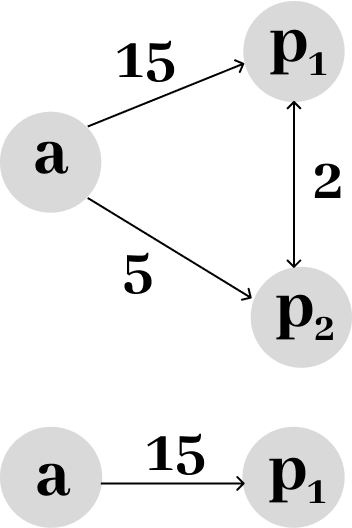
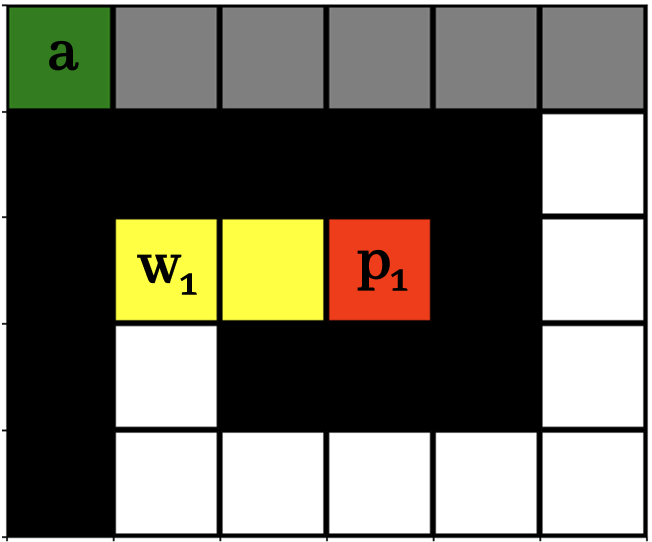
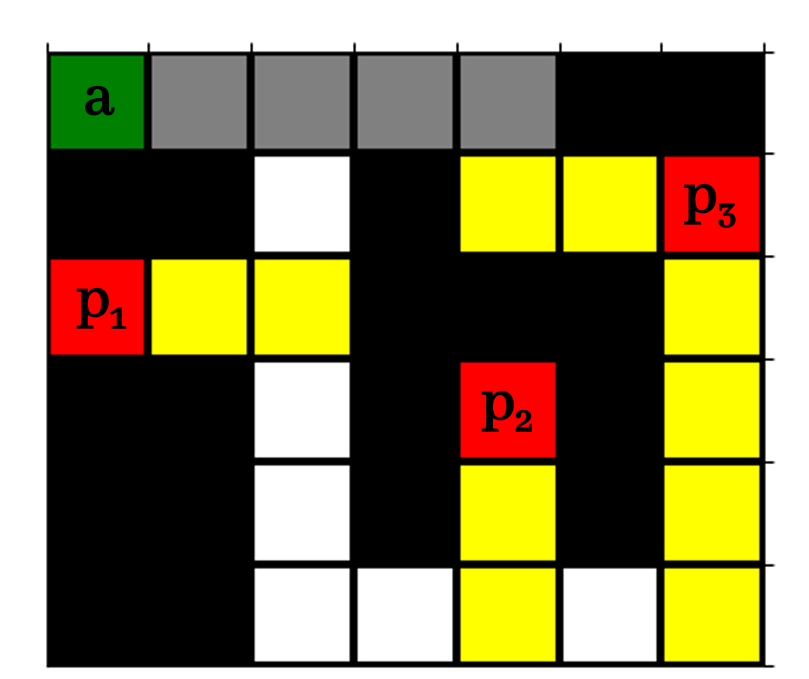
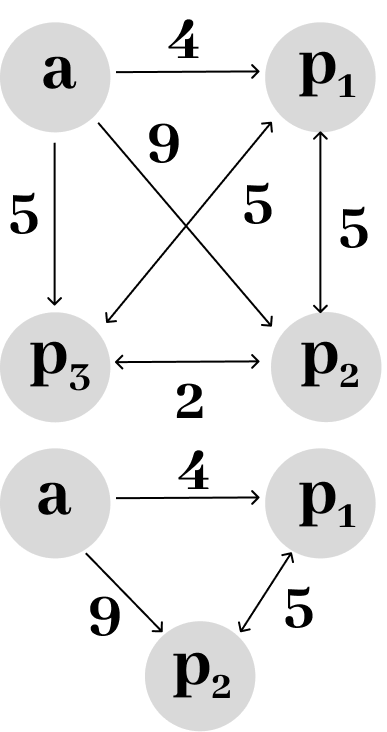
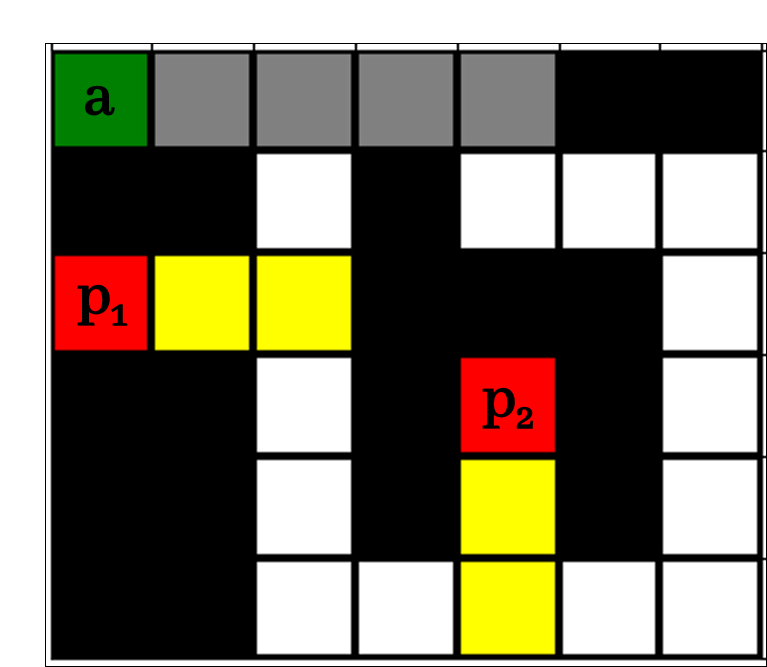
Figure 2: Examples where pivot pruning leads to stronger or weaker heuristics, showing the impact of careful pivot selection on heuristic values.
- Parallel Heuristic Calculation (PHC): The majority of runtime overhead arises from computing expensive mTSP lower bounds. Batch parallelization (Batch-A*) enables efficient batched computation of heuristic values across multiple nodes, accelerating search without sacrificing admissibility.
Ablation studies confirm both pivot pruning and PHC provide measurable and sometimes multiplicative speedups, scaling with problem dimension and agent count.
Suboptimal and Anytime Search: MxW, Focal Search, and Postprocessing
While optimal search remains intractable for very large instances, the paper introduces a suite of suboptimal solvers with formal solution quality bounds:
- Minimax Weighted A* (MxW): Generalizing weighted A* (W*) to makespan objectives in multi-agent joint-space, MxW defines U0, ensuring U1-bounded suboptimality. This addresses the over-conservatism of classical W* for makespan minimization.
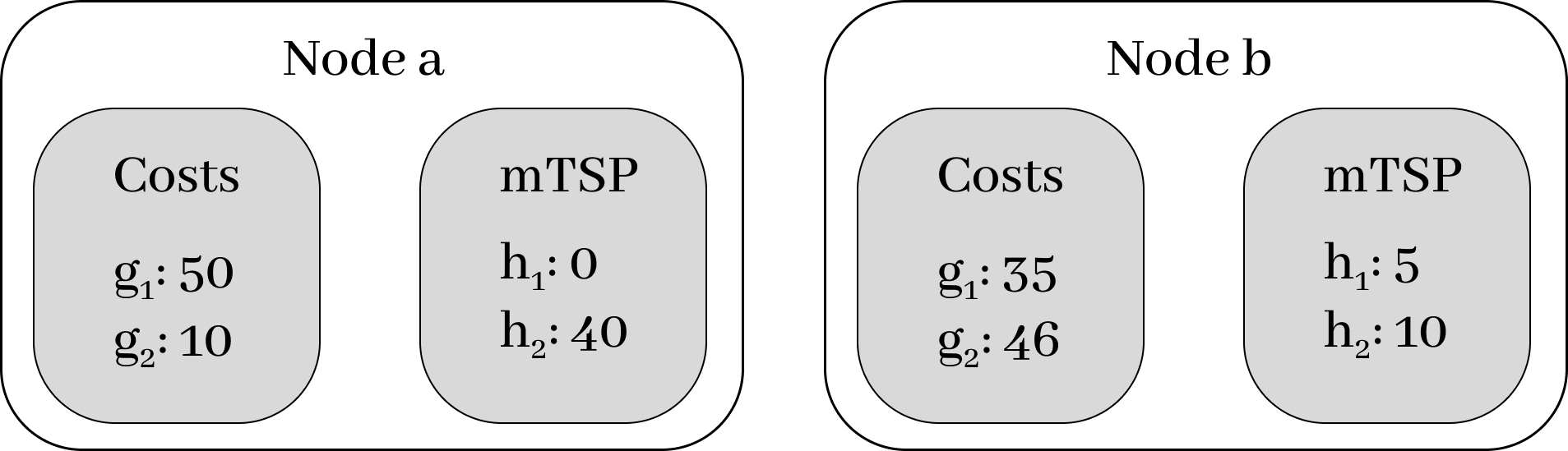
Figure 3: Example search nodes illustrating computation of MxW priorities using agent path costs and estimated efforts.
- Focal Search Variants: Uses admissible (Singleton, mTSP-based) U2-values and a secondary "effort" heuristic (Sum Of Remaining Costs (SORC), Max Of Remaining Costs (MORC)) to guide expansion among near-optimal nodes. Focal search maintains anytime properties and allows for rapid initial solution discovery and subsequent refinement.
- Anytime Variants (A, AFS): Both MxW and Focal Search are extended to continue searching for improvements after initial solution discovery, controlled by pruning nodes exceeding the best found cost. Empirical performance shows rapid solution improvement over time.
- Postprocessing Framework: Given a suboptimal assignment, the path of the agent with the maximal cost is refined optimally over just its unique responsibility cells. This iterative decomposition guarantees solution improvement at negligible additional runtime and is particularly effective when used with MxW.
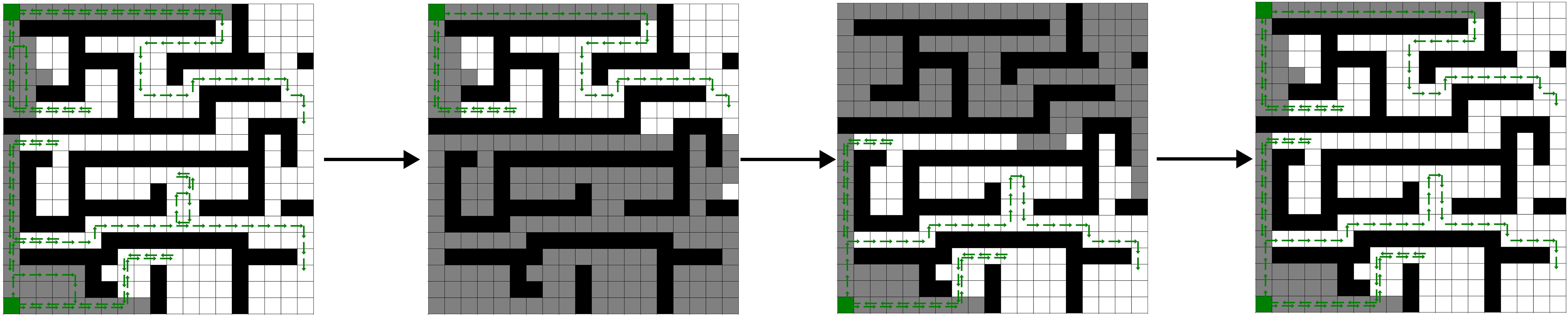
Figure 4: Visualization of initial joint-space solution, per-agent responsibilities, and solution refinement after postprocessing.
Heuristic Innovations for Joint-Space Coverage
Heuristic calculation relies on constructing a graph U3 using a selected set of "pivots" from the unobserved cells. The search for admissible but informative lower bounds on the makespan proceeds by solving a relaxed mTSP instance on U4. Edges from agents to pivots and between pivots reflect the least possible cost to observe outstanding regions. The integration of pivot pruning into this framework prevents spurious shortcutting that would otherwise diminish the lower bound, thus strongly influencing the practical efficiency of A*-based approaches.
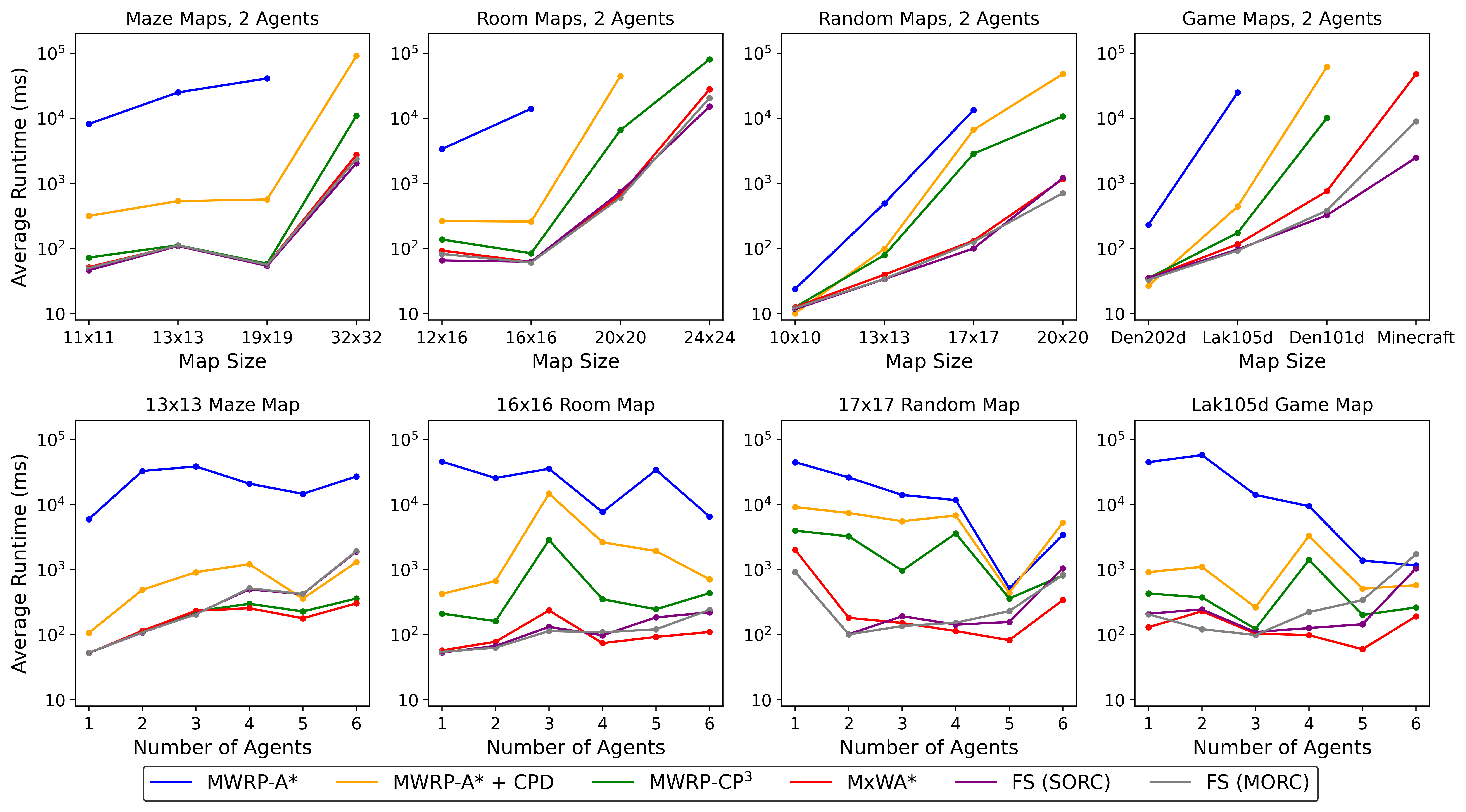
Experimental Results
Comprehensive evaluations are conducted on several canonical grid-based environments, including structurally diverse instances (e.g., Maze, Random, Room, Minecraft-inspired maps), with agent counts up to 6 and grid sizes exceeding 1,500 free cells. The findings can be summarized as follows:
Implications and Future Research
This work delivers the first truly scalable optimal and bounded-suboptimal algorithms for graph-based MWRP under arbitrary LOS, substantiated both theoretically and empirically. The cell/path dominance methodology represents a general and reusable coverage pruning framework. The joint-space MxW construction and postprocessing framework generalize to other makespan-focused multi-agent planning domains, such as graph-based patrolling, persistent surveillance, and non-grid environments.
Open research directions include the design of faster or even learning-based admissible heuristics for joint-space coverage [see e.g., (Chong et al., 2024)], extension to scenarios with agent-agent collision constraints or heterogeneous agent capabilities, and evaluation on fully general graphs beyond grids (e.g., PRM*-derived topologies). The principles developed present immediate utility for practical deployment of multi-robot coverage architectures in dynamic or large-scale environments.
Conclusion
The paper introduces a novel state-dominance-based approach and optimal search algorithm (3) for MWRP, together with bounded-suboptimal and anytime search methods (MxW, Focal Search, and their variants), and a highly effective postprocessing strategy. These collectively enable provably bounded-quality solutions to MWRP at unprecedented scales, as validated on a suite of benchmark environments. The formalism and algorithmic innovations are of direct interest to the AI, multi-robot planning, and combinatorial optimization communities, and provide a foundation for future advancements in scalable optimal and anytime coverage search.