- The paper establishes explicit feasibility conditions for achieving a target follower density using controlled leader mass amidst complex follower interactions.
- It develops a closed-form feedback control law ensuring exponential convergence of both leader and follower densities under PDE dynamics.
- Numerical simulations validate phase transitions in leader mass requirements, confirming the robustness of the control framework across varied interaction regimes.
Leader-Follower Density Control with Interacting Followers: Feasibility and Convergence
This paper investigates density control in leader-follower multi-agent systems, with a focus on scenarios where followers interact with one another via nontrivial mechanisms reflecting realistic collective behaviors (e.g., collision avoidance, flocking, cohesion). The population-level dynamics of both leaders and followers are formulated through coupled PDEs, with the leader density ρL(x,t) evolving via a designed control velocity u(x,t), and the follower density ρF(x,t) governed by convection-diffusion equations. Critically, the convective term for followers incorporates both follower-leader and follower-follower interactions, the latter being modeled by periodic convolution with an interaction kernel fFF.
The adopted follower-follower interaction kernels encompass both purely repulsive forms and Morse-type potentials, enabling the framework to capture both attraction and repulsion in agent interactions.
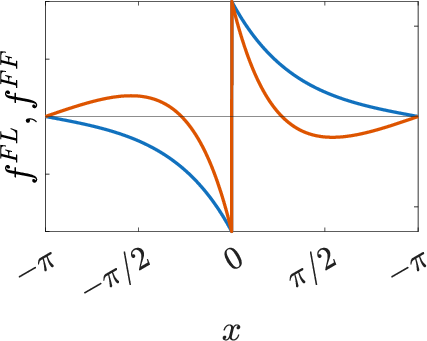
Figure 1: Follower-leader (pure repulsion, blue) and Morse-type follower-follower (long-range attraction, short-range repulsion, orange) interaction kernels.
Feasibility Analysis: Necessary and Sufficient Conditions
A central contribution is the derivation of explicit necessary and sufficient feasibility conditions (Theorem 1) for achieving a specified follower density target ρˉF via leader control when follower-follower interactions are present. Notably, the feasibility conditions take the form of analytical inequalities involving the target density shape, leader and follower mass budget, diffusion, and the interaction strength and form. The leader density ρˉL required to support a given steady-state follower density must be non-negative and integrate to the available leader mass.
The analysis reveals sharp phase transitions: for a fixed follower population, if the leader mass is below a critical threshold—determined by the interaction and diffusion structure—the control objective is provably unattainable, regardless of the control input. This creates well-defined feasibility regions in the control parameter space.
The impact of follower-follower interactions is evidently nontrivial:
- Repulsive or weakly attractive interactions generally increase the minimum required leader mass, acting as a disturbance that impedes control and necessitates more leaders.
- Strongly attractive interactions may, under certain alignment of uncontrolled and target distributions, actually reduce the leader requirement, as endogenous follower cohesion assists control objectives.
These claims are substantiated by parametric sweeps over interaction and diffusion parameters, with feasibility phase diagrams exhibiting clear nonlinearity and parameter sensitivity (see Figure 2, Figure 3).
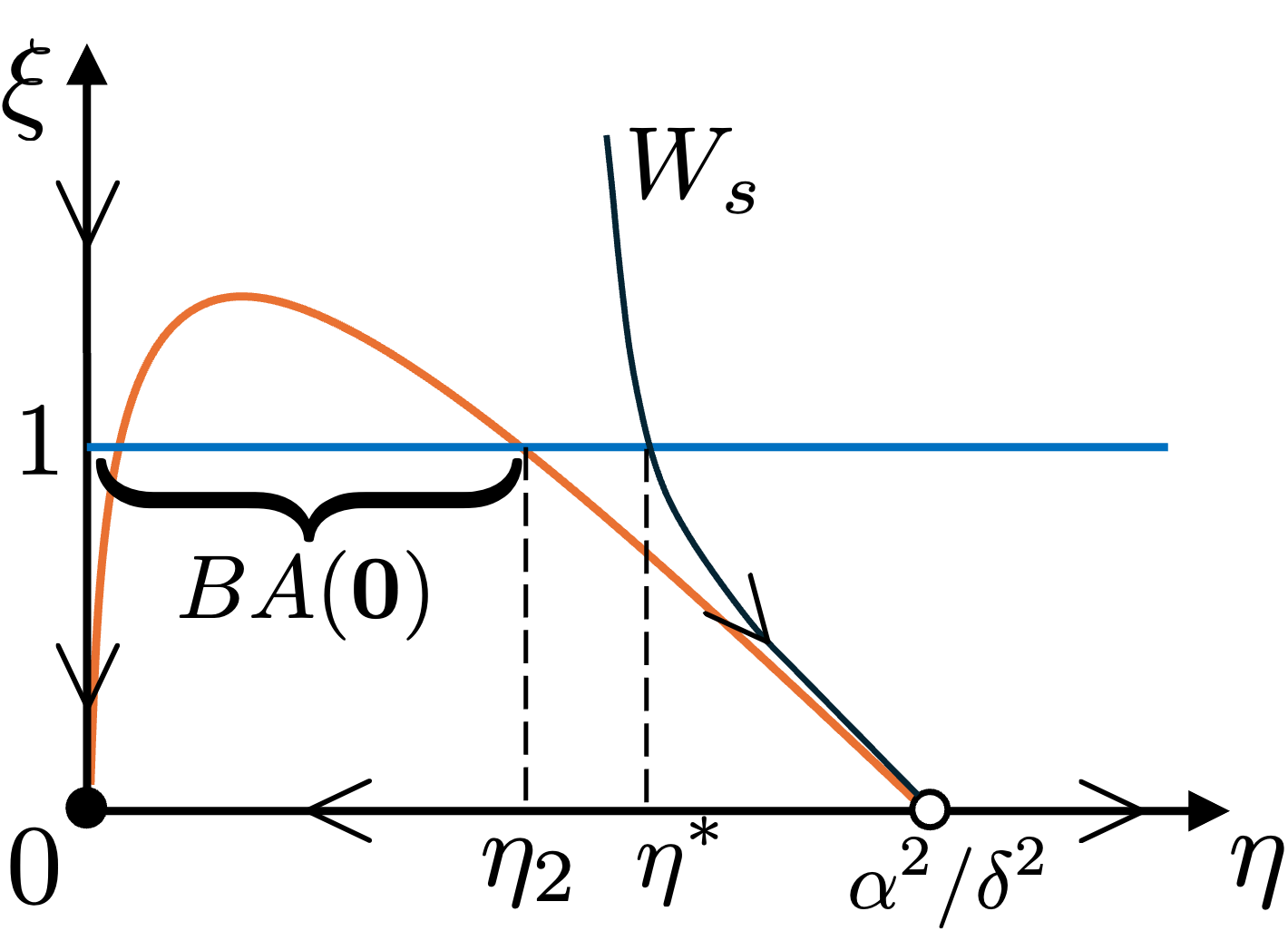
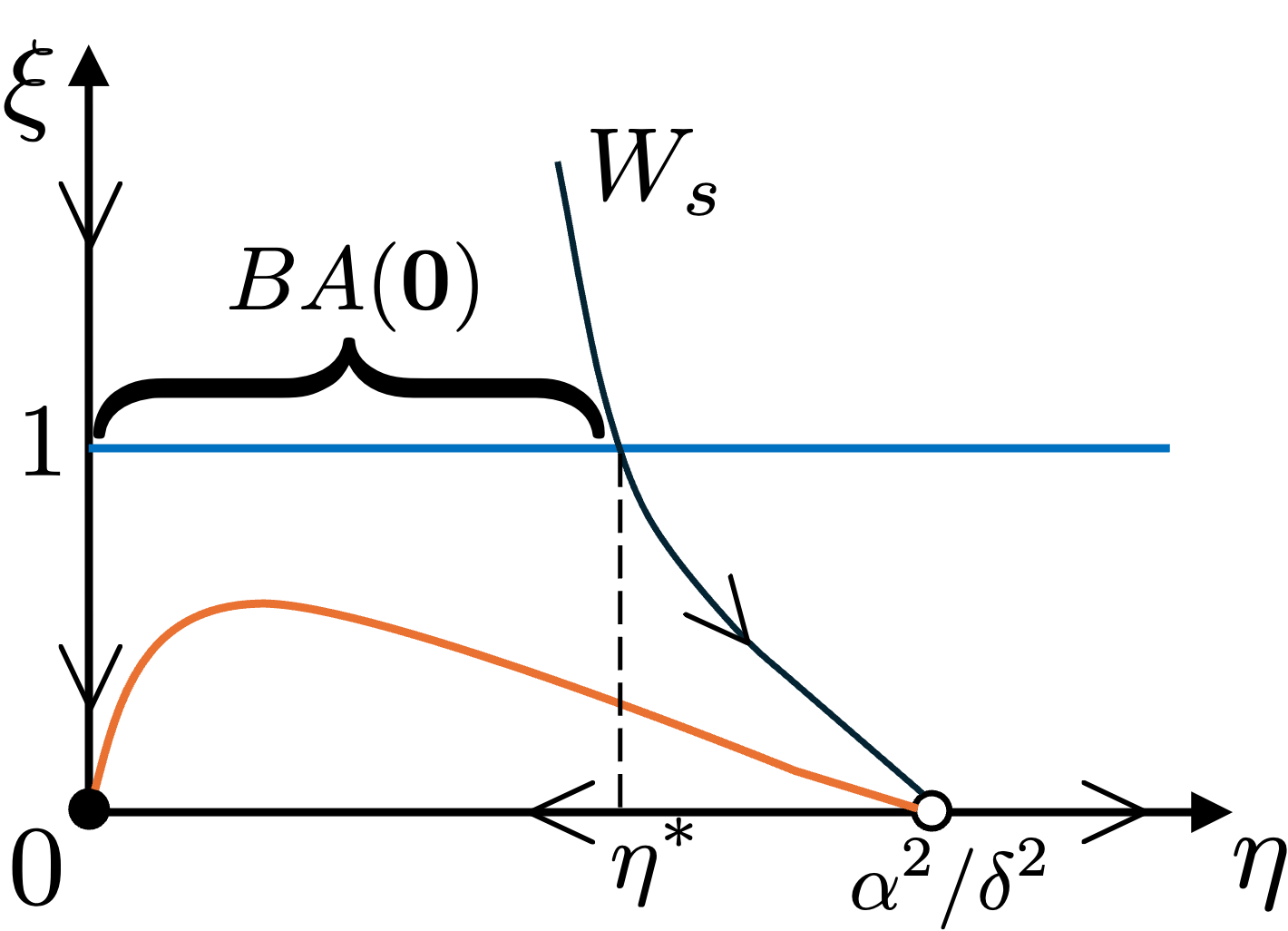
Figure 2: Feasibility regions in (κ, D) space for weak (panel a) and strong attractive (panel b) follower-follower interactions, indicating the minimum feasible leader mass for density shape control.


Figure 3: Mismatch between minimum feasible leader mass with and without follower-follower interactions; positive values indicate increased leader requirements, negative values indicate facilitation by interactions.
Feedback Control and Stability: Design and Guarantees
A closed-form feedback control law for the leader population is extended to incorporate the effects of follower-follower interactions. The law ensures that the leader density converges exponentially to the desired steady-state profile, and, under the derived feasibility constraints, the follower density converges locally to the target distribution.
Theoretical analysis provides a Lyapunov-based proof of local asymptotic stability (Theorem 2), with an explicit description of the basin of attraction. Stability margins are proven to degrade with increasing interaction strength, quantified via bounds involving the L∞ norm of derivatives of the target density and interaction kernel norms.
Notably, upscaling to higher-dimensional domains (e.g., periodic two-dimensional torus) is accomplished through analogous PDE formulations. The feasibility and stability principles generalize, with convolution and differential operators replaced by their multidimensional counterparts. Deconvolution for leader density synthesis is performed numerically for practical implementability.
Macroscopic and Microscopic Validation
Comprehensive numerical simulations validate the continuum analysis both at the PDE level and by direct simulation of agent-based models employing large but finite leader and follower swarms. The deployment architecture operationalizes a multi-scale control bridge:
- The control input for leaders is synthesized at the density (field) level and then discretized via spatial sampling to individual leader positions.
- Densities required for control feedback are estimated online from finite agent positions via kernel density estimation.
In all tested scenarios—ranging from no, to weak, to strong follower-follower interactions—the derived feasibility thresholds accurately predict the onset of success/failure in closed-loop performance in agent-based simulations. Finite-size effects (finite number of agents) introduce residual tracking error, but the phase transition boundaries remain robust, as seen in Figure 4 and Figure 5.
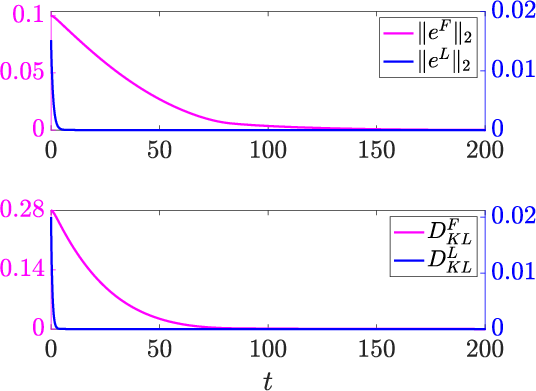
Figure 4: Steady-state follower tracking error versus leader mass in macroscopic PDE simulations for various interaction regimes.
Figure 5: Agent-based simulation results confirming minimal tracking errors when leader mass exceeds theoretical feasibility threshold.
Practical and Theoretical Implications
On the practical side, the explicit feasibility bounds and control laws give principled guidance for the design and deployment of leader-follower multi-agent systems, such as robotic swarms, coordinated traffic management with mixed autonomy, and crowd control. The phase transition analysis delivers herdability certificates—determining not only whether control is possible, but quantifying the minimal leader deployment required.
Theoretically, the framework for integrating realistic intra-population interactions within continuum control bridges a gap between idealized and physically accurate multi-agent models. The work establishes a foundation for incorporating mean-field optimal control methodologies, control barrier functions, and for analyzing the effect of unmodeled dynamics, delays, or learning-based interaction structure estimation.
The paper identifies open challenges regarding the rigorous quantification of finite-population effects, the handling of density estimation errors and delays, and the extension to settings where kernel structure is unknown and must be learned online. Future research directions point toward deeper connections with large-scale optimal transport, dynamic herdability characterization, and empirical validation in robotic platforms.
Conclusion
The presented analysis rigorously characterizes when and how target spatial distributions can be achieved in leader-follower multi-agent systems with interacting followers. The work provides sharp feasibility boundaries, closed-form control laws, and explicit stability conditions, validated in both continuum and particle regimes. These results substantially inform both theory and engineering practice for scalable, interactively robust multi-agent density control.