A-SLIP: Acoustic Sensing for Continuous In-hand Slip Estimation
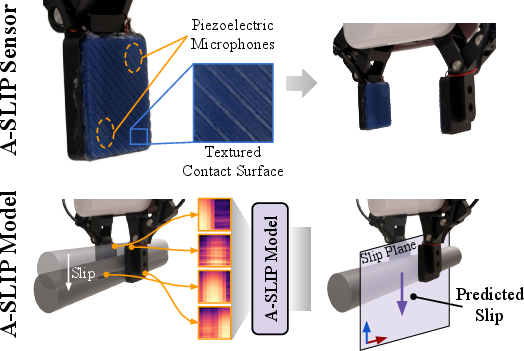
Abstract: Reliable in-hand manipulation requires accurate real-time estimation of slip between a gripper and a grasped object. Existing tactile sensing approaches based on vision, capacitance, or force-torque measurements face fundamental trade-offs in form factor, durability, and their ability to jointly estimate slip direction and magnitude. We present A-SLIP, a multi-channel acoustic sensing system integrated into a parallel-jaw gripper for estimating continuous slip in the grasp plane. The A-SLIP sensor consists of piezoelectric microphones positioned behind a textured silicone contact pad to capture structured contact-induced vibrations. The A-SLIP model processes synchronized multi-channel audio as log-mel spectrograms using a lightweight convolutional network, jointly predicting the presence, direction, and magnitude of slip. Across experiments with robot- and externally induced slip conditions, the fine-tuned four-microphone configuration achieves a mean absolute directional error of 14.1 degrees, outperforms baselines by up to 12 percent in detection accuracy, and reduces directional error by 32 percent. Compared with single-microphone configurations, the multi-channel design reduces directional error by 64 percent and magnitude error by 68 percent, underscoring the importance of spatial acoustic sensing in resolving slip direction ambiguity. We further evaluate A-SLIP in closed-loop reactive control and find that it enables reliable, low-cost, real-time estimation of in-hand slip. Project videos and additional details are available at https://a-slip.github.io.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
A simple guide to “A-SLIP: Acoustic Sensing for Continuous In-hand Slip Estimation”
What this paper is about (overview)
Robots often need to hold and move objects without dropping them. A common problem is “slip,” when an object starts sliding in the robot’s grip. This paper introduces A‑SLIP, a low-cost way for a robot to “listen” for slip using tiny microphones inside its gripper. By listening to the small vibrations that happen when an object starts sliding, the system can tell if slip is happening, which way the object is moving, and how strong the slip is—fast enough to help the robot correct its grip in real time.
What the researchers wanted to find out (key objectives)
In simple terms, the team set out to:
- Detect slip as it happens, not just after the fact.
- Figure out the direction the object is sliding in the gripper.
- Estimate how much it’s slipping (the strength or speed of the slide).
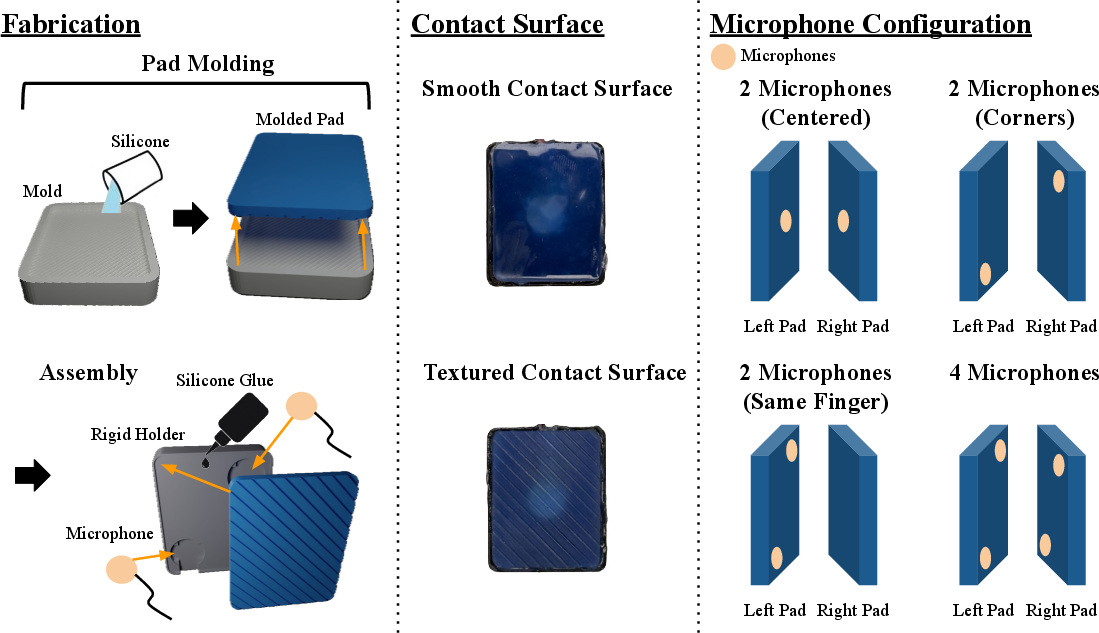
- Test how microphone placement and number (one, two, or four) affect accuracy.
- Prove the system works in real tasks, even with robot motor noise in the background.
How they did it (methods explained simply)
Think of dragging a cup across a table: you can hear a faint scratching sound. That sound changes depending on how fast and which way the cup moves. The researchers used that idea for robots.
- Hardware: They put tiny, durable microphones behind soft silicone pads on the robot’s gripper fingers. The pads have a light texture (tiny bumps) that make clearer vibration signals when an object slides. They tried different microphone setups (one, two, and four mics) and different positions to see what works best.
- Listening to vibrations: When an object slips, it creates small vibrations that travel through the gripper. The microphones pick up these vibrations as sound.
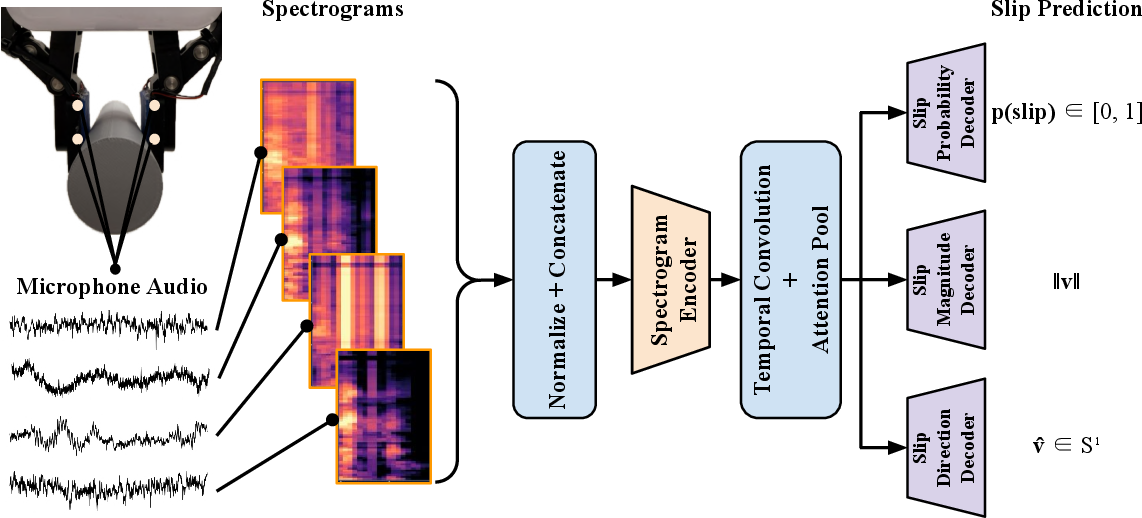
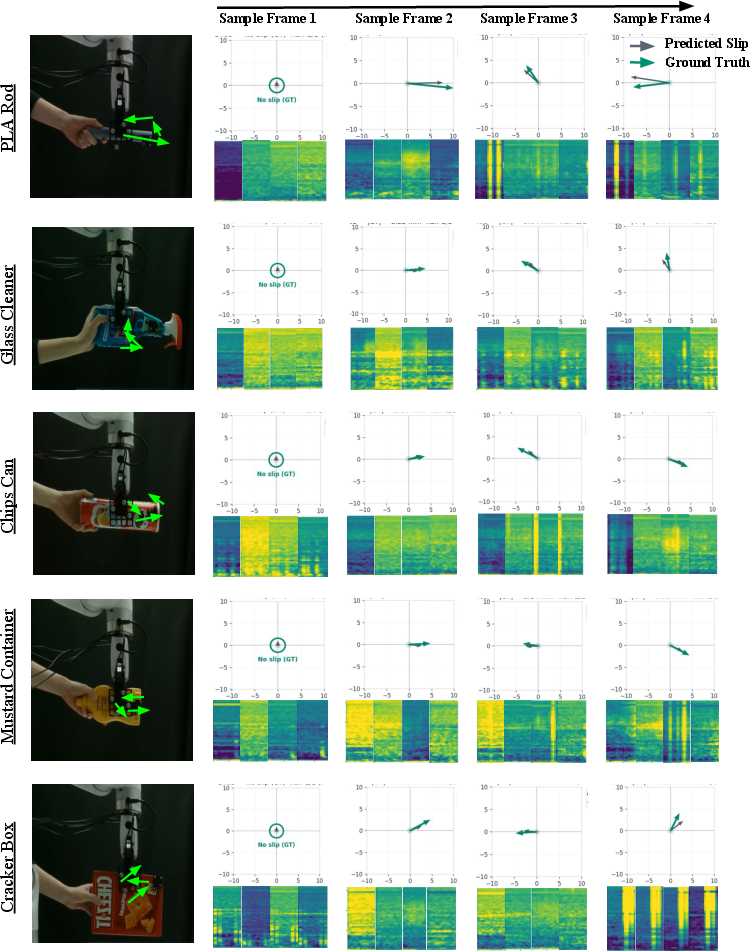
- Turning sound into something a computer can read: The audio is converted into “spectrograms,” which are like pictures of sound over time and frequencies (think: a heat map of tones). The system uses a lightweight computer vision model (a small convolutional neural network with attention) to read these spectrograms.
- What the model predicts: For each short slice of time (about 0.1–0.3 seconds), the model outputs: 1) whether there is slip, 2) the direction of slip in the gripper’s plane, 3) how big or strong the slip is.
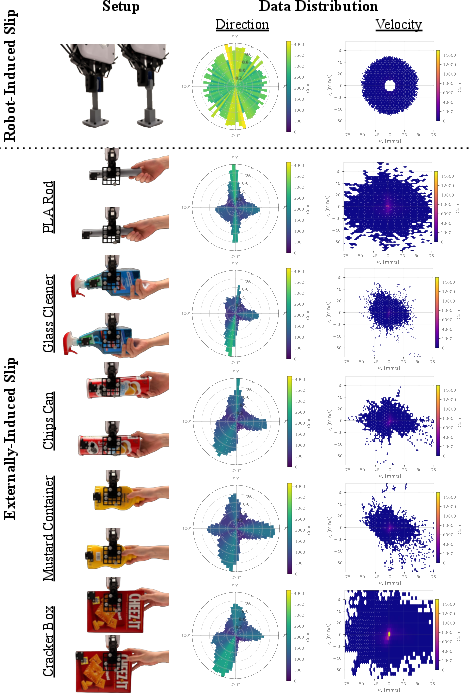
- Training the system: They trained the model in two steps: 1) Pretraining: The robot itself created slip by rubbing against a known surface, so labels were easy to get. 2) Finetuning: People pushed on objects while the robot held them. A motion-capture system (like what movies use for tracking movement) gave accurate slip direction and size labels to refine the model.
- Real tasks: Finally, they used A‑SLIP to control a robot in real time, making it stop pushing when slip starts (to avoid dropping or damaging objects) or move to follow the slipping object to keep a stable hold.
What they found (main results and why they matter)
Here are the most important takeaways from the experiments:
- Multi-microphone “listening” is much better than a single mic:
- Using four microphones cut the direction error by about 64% and the slip size error by about 68% compared to one mic.
- Best setup achieved an average direction error of about 14 degrees (that’s pretty precise for fast, subtle slips).
- Better than older methods:
- A‑SLIP improved slip detection accuracy by up to 12% and reduced direction errors by about 32% compared to traditional approaches like SVM models.
- Where the microphones go matters:
- Two microphones on opposite corners (across the two gripper fingers) worked better than putting both on the same finger. Spreading mics out helps the system tell which side is vibrating more, which reveals the direction of slip.
- Four microphones performed best overall.
- The textured silicone pad helps:
- The textured surface reduced direction error by about 63% compared to a smooth pad, because it creates clearer vibration patterns during slip.
- Timing trade-offs:
- Shorter listening windows (like 100 ms) can give sharper direction estimates, but slightly worse slip detection.
- Longer windows (like 300 ms) detect slip more easily but blur quick direction changes.
- Around 200 ms was a good balance for both.
- Works even with robot noise:
- The model still performed well when the robot’s own motors were moving and making noise.
- Real robot tasks:
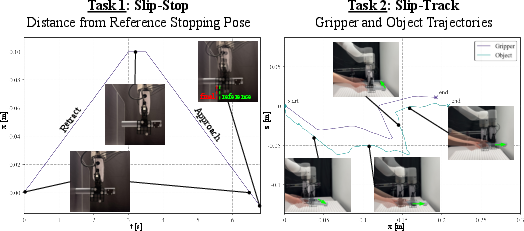
- In a “slip-stop” task (push an object toward a wall and stop as soon as slip occurs), A‑SLIP had a 100% success rate across objects and stopped more precisely than the baseline method.
- In a “slip-track” task (follow the object as it starts to slide), A‑SLIP cut the tracking error roughly in half compared to the baseline, keeping a more stable hold.
Why this matters (implications and impact)
A‑SLIP shows that robots can use sound—specifically, structure-borne vibrations—to sense and control slip accurately, quickly, and cheaply. This has several big advantages:
- It avoids fragile cameras and complex, expensive tactile sensors.
- It fits into small grippers without getting in the way.
- It gives fast feedback for real-time control, helping robots avoid drops and handle a wider variety of objects safely.
This could improve robot performance in factories, warehouses, and even home environments where robots need to grasp, carry, or place many different objects reliably. In the future, the approach could be extended to detect rotational slip, work across more gripper designs, adapt automatically to new objects without special labeling, and reduce sensing delay even further.
Knowledge Gaps
Below is a consolidated list of concrete knowledge gaps, limitations, and open questions left unresolved by the paper that future work could address.
- Slip representation beyond planar translation: no estimation of rotational slip about the grasp axis or out-of-plane motion; evaluate models that jointly infer 3-DoF or 6-DoF in-hand motion.
- Generalization to other end-effectors: results are restricted to one parallel-jaw gripper; assess transfer to different finger geometries, widths, materials, and multi-finger dexterous hands.
- Object and surface diversity: limited set of five objects; test across broader materials (e.g., rubber, leather, felt), highly compliant surfaces, rough/anisotropic textures, wet/oily/dirty surfaces, and curved/irregular geometries.
- Domain shift to unseen objects: no leave-one-object-out evaluation; quantify zero-shot performance on unseen objects and develop domain adaptation strategies to maintain accuracy without per-object finetuning.
- Dependence on motion-capture labels: finetuning requires external mocap; develop self-/weakly-supervised labeling (e.g., using control signals, force/torque trends, or consistency constraints) to remove mocap dependency.
- Label noise and ground-truth fidelity: robot-state-derived labels may not equal true contact slip; characterize label error and its effect on training, and add uncertainty-aware losses.
- Latency vs. accuracy trade-offs: 200 ms windows introduce control latency; systematically profile end-to-end latency, detection onset delay, and stability vs. window size, and explore causal streaming with shorter context plus temporal memory.
- Robustness to environmental noise: only robot operating noise is tested; evaluate in the presence of ambient machinery, fans, human speech, and impulsive environmental vibrations.
- Disambiguation from non-slip contact events: analyze false positives due to tapping, impacts, or remote contacts; introduce event classifiers or band-limited filtering to reject non-slip vibrations.
- Sensitivity to grasp force and normal load: no systematic study of performance under varying grip forces, contact pressures, or friction regimes (static vs. kinetic); map error vs. normal force to guide controller tuning.
- Long-term durability and drift: despite claims of durability, there is no longitudinal study of performance under wear, temperature/humidity changes, silicone aging, or adhesive degradation; quantify drift and propose recalibration procedures.
- Sensor-to-sensor and unit-to-unit variability: no analysis of manufacturing tolerances (pad thickness, texture fidelity), microphone gain differences, and their effect on model transfer; define calibration and normalization protocols.
- Microphone geometry optimization: only four layouts are tested; perform principled design/optimization (e.g., Bayesian or FEM-guided) of number, placement, and mounting for direction observability and SNR.
- Texture design space: one texture is shown to help; systematically vary texture pattern, scale, and depth, and co-design with microphone placement to maximize directional information.
- Alternative transducers: compare piezoelectric microphones with accelerometers, contact microphones, or strain gauges for bandwidth, SNR, durability, and cost; consider hybrid acoustic–IMU sensing.
- Model ablations and architecture alternatives: the benefits of channel and temporal attention are not isolated; compare against transformers, temporal convolutional networks, and lightweight streaming models; report parameter counts and compute loads.
- Training regime alternatives: only encoder-freeze finetuning is used; test full-network finetuning, adapters, or LoRA to assess adaptation quality and data efficiency.
- Data efficiency and augmentation: quantify performance vs. finetuning dataset size; explore physics-inspired augmentation (e.g., surface response models), domain randomization, and synthetic data.
- Real-time deployment metrics: report throughput (Hz), compute latency on embedded hardware, and control loop integration details; benchmark on-device performance and power.
- Failure mode analysis: provide case studies where direction/magnitude estimation fails (e.g., symmetric slip, micro-slip, low-SNR contacts), and quantify confusion between opposing directions.
- Slip-onset and offset dynamics: measure detection delay, early-onset sensitivity, and hysteresis near the slip threshold; tune thresholds and temporal smoothing to reduce oscillations.
- Magnitude calibration and units: clarify mapping from acoustic features to physical slip distance; investigate systematic bias and per-surface calibration for magnitude regression.
- Contact localization: method estimates a global slip vector but not where on the contact patch slip initiates; investigate estimating slip location to enrich control feedback.
- Multi-contact scenarios: performance with multiple simultaneous contacts (e.g., multi-finger hands, complex grasps) is unexplored; extend to multi-contact fusion and disentangling contact-specific slips.
- External actuation and task diversity: evaluate in more complex tasks (e.g., tool use, assembly, dynamic throws/catches) where slip evolves rapidly and control demands are higher.
- Channel synchronization and phase effects: the audio mixer’s synchronization and phase consistency are not characterized; quantify inter-channel delay tolerance and calibrate TDOA for improved direction estimation.
- Security and interference: assess vulnerability to intentional acoustic/structure-borne interference and develop filtering or robustification techniques.
- Benchmarking against non-acoustic tactile baselines: compare end-to-end performance with capacitive arrays, GelSight/DIGIT, and force–torque-based methods on identical tasks to quantify modality trade-offs.
- Out-of-plane coupling and structural resonances: analyze how finger/body resonances and mounting stiffness shape the spectrum; design mechanical isolation or damping to stabilize features across platforms.
- Controller co-design: explore controllers that explicitly incorporate slip vector uncertainty, latency, and dynamics (e.g., MPC with uncertainty bounds) and study closed-loop stability margins.
Practical Applications
Immediate Applications
The following applications can be deployed with modest engineering effort, using the paper’s low-profile, low-cost hardware (textured silicone pads + embedded piezoelectric microphones) and the provided learning pipeline (multi-channel log-mel spectrograms + lightweight CNN) for slip presence, direction, and magnitude estimation.
- Robotics and logistics: slip-aware grasping “reflexes” for pick-and-place
- Sector: robotics, warehousing, e-commerce fulfillment, manufacturing.
- Use case: Retrofit parallel-jaw grippers on cobots to stop pushes when slip is detected and to track slip vectors to re-center objects during transport (as demonstrated by 100% task success and lower pose error vs. SVM baseline).
- Tools/products/workflows: “Slip Reflex” controller (ROS2 node) that subscribes to the A-SLIP slip-vector stream and issues stop/adjust commands; gripper upgrade kits with textured pads and 4 synchronized mics; calibration scripts for gain/latency.
- Assumptions/dependencies: Parallel-jaw or similar gripper; 4-mic configuration for best performance; 200 ms inference window latency; slip confined to grasp plane; synchronized multi-channel audio; basic finetuning on representative objects improves robustness.
- Assembly and insertion assistance
- Sector: manufacturing (electronics, consumer goods).
- Use case: Detect incipient in-hand slip during connector insertion, cable routing, or press-fit, then micro-adjust pose along the predicted slip direction rather than blindly increasing force.
- Tools/products/workflows: Slip-vector-conditioned impedance controller; “grasp QA” module that flags unreliable grasps pre-insertion.
- Assumptions/dependencies: Contact-induced vibrations must be present (very smooth/compliant materials may reduce signal); controller integration required.
- Fragile and deformable object handling
- Sector: food handling, pharmaceuticals, glassware packaging.
- Use case: Reduce grip force while maintaining stability by using slip magnitude as a feedback signal; avoid drops and bruising of produce or breakage of glass bottles.
- Tools/products/workflows: Slip-thresholded force/position hybrid control; in-line QA to reject unstable grasps.
- Assumptions/dependencies: Surfaces with minimal asperity may reduce signal; may need object-specific finetuning or texture-pad variants.
- Bin picking and regrasping robustness
- Sector: industrial robotics, logistics.
- Use case: Detect and correct post-lift slippage; trigger regrasp or minor pose corrections along the predicted slip vector before transport.
- Tools/products/workflows: Post-grasp verification step with A-SLIP; grasp-planner feedback loop that refines approach based on slip statistics.
- Assumptions/dependencies: Integration with vision/grasp planner; short slip bursts must be captured within 100–200 ms windows.
- Safety interlocks for collaborative robots
- Sector: workplace safety, cobots.
- Use case: Stop or slow down motions when unexpected slip suggests external contact or an unstable grasp that could lead to drops near humans.
- Tools/products/workflows: Add a slip-confidence gate to safety PLCs; logging dashboards for slip incidents.
- Assumptions/dependencies: Safety certification requires validation; false positives minimized via multi-mic configuration and tuned thresholds.
- Predictive maintenance and process monitoring (lightweight)
- Sector: factory operations, QA.
- Use case: Monitor trends in slip energy/direction distribution to detect pad wear, contamination, or grip misalignment over time.
- Tools/products/workflows: Slip telemetry + dashboards; threshold-based alerts for maintenance.
- Assumptions/dependencies: Baseline data needed; environmental and object variability must be accounted for.
- Academic and teaching labs: acoustic tactile sensing kits
- Sector: academia, education.
- Use case: Course modules on contact acoustics, signal processing, and robot control; reproducible baseline for slip-vector estimation research.
- Tools/products/workflows: Open-source CAD for textured pads and holders; synchronized audio acquisition; pretrained weights and training code; data augmentation recipes.
- Assumptions/dependencies: Access to standard grippers or 3D-printed mounts; small GPU/edge device for inference.
- Software SDKs and ROS integration
- Sector: software tools for robotics.
- Use case: Drop-in A-SLIP SDK offering a slip-vector API, visualization, and logging; plugins for MoveIt/ROS2 to enable grasp-aware motion.
- Tools/products/workflows: C++/Python nodes publishing slip as a 2D vector with confidence; adapters for common grippers (e.g., Robotiq).
- Assumptions/dependencies: Synchronization with robot clock; deployment on edge compute (e.g., Jetson, NUC) capable of 100–200 ms windows.
Long-Term Applications
These opportunities require additional research, scaling, or development (e.g., extending to 6-DoF slip, improving generalization to smooth/compliant surfaces, self-supervised training without mocap).
- 6-DoF in-hand motion estimation (translation + rotation)
- Sector: robotics (dexterous hands, humanoids, mobile manipulators).
- Use case: Closed-loop manipulation that corrects rotational slip about the grasp axis (e.g., nut turning, tool reorientation, peg alignment).
- Tools/products/workflows: Multi-finger, multi-mic arrays with learned spatial fusion; rotational slip heads in the model; causal streaming to reduce latency.
- Assumptions/dependencies: Densified sensor arrays and new labels for rotational slip; more sophisticated control laws.
- Multimodal fusion for robust slip on smooth/compliant objects
- Sector: manufacturing, service robotics.
- Use case: Combine acoustic cues with vision-based tactile (e.g., DIGIT) or force-torque to handle cases with weak acoustic signatures.
- Tools/products/workflows: Sensor fusion frameworks; adaptive weighting based on SNR; object-aware domain adaptation.
- Assumptions/dependencies: Extra sensors add cost/complexity; synchronized, low-latency fusion required.
- Self-supervised/weakly supervised slip learning at scale
- Sector: academia, industry R&D.
- Use case: Replace mocap with robot-kinematics-, force-, or vision-proxy labels; continuous on-line adaptation per site/object set.
- Tools/products/workflows: Bootstrapped pretraining on robot-induced slip, followed by self-labeling during production; uncertainty estimation.
- Assumptions/dependencies: Reliable proxy signals and safeguards to prevent feedback drift.
- Material/texture and friction estimation from contact acoustics
- Sector: grasp planning, quality control.
- Use case: Infer friction coefficients or surface texture to proactively choose grasp force/pose; detect contamination (oil, dust) via spectral shifts.
- Tools/products/workflows: “Acoustic friction mapper” module feeding grasp planners; change-detection alarms.
- Assumptions/dependencies: Requires labeled datasets across materials; confounding factors (object geometry, temperature) must be modeled.
- Prosthetics and assistive devices with slip feedback
- Sector: healthcare, assistive tech.
- Use case: Real-time slip feedback to users via haptics (vibrotactile cues when objects begin to slide); automatic grip force modulation.
- Tools/products/workflows: Miniaturized, sterilizable fingertip pads for prosthetic hands; low-power microcontrollers for on-board inference.
- Assumptions/dependencies: Human-in-the-loop safety and comfort; medical-device certification; adaptation to varied daily objects.
- Surgical and medical robotics
- Sector: healthcare.
- Use case: Detect micro-slip of tissue/instruments in grippers/end-effectors to prevent unintended motion during procedures.
- Tools/products/workflows: Biocompatible, sterilizable contact pads; high-frequency, low-latency inference; integration with force control.
- Assumptions/dependencies: Strict sterility and safety requirements; very smooth/soft tissue may limit acoustic signal strength.
- Standardization and policy for slip-aware safety in cobots
- Sector: policy, industrial standards.
- Use case: Define performance benchmarks and test methods for slip detection in collaborative environments (drop prevention, contact safety).
- Tools/products/workflows: ISO/ASTM test fixtures with known slip profiles; procurement guidelines specifying slip-vector accuracy/latency.
- Assumptions/dependencies: Industry consensus; clear privacy guidance for structure-borne vs. airborne audio (ensure microphones are not recording human speech).
- General-purpose household and eldercare robots
- Sector: daily life, consumer robotics.
- Use case: Slip-aware handling of dishes, groceries, and assistive tasks (e.g., passing objects, opening containers) with low-cost grippers.
- Tools/products/workflows: Consumer-grade kits integrated into home robots; cloud-assisted adaptation to new objects.
- Assumptions/dependencies: Robustness to varied, smooth surfaces; unobtrusive hardware design; privacy-by-design (structure-borne-only sensing).
- Predictive maintenance at fleet scale
- Sector: industrial operations.
- Use case: Use long-horizon slip statistics to predict pad/microphone degradation and schedule maintenance; detect misalignment or loose fasteners via abnormal vibration patterns.
- Tools/products/workflows: Fleet analytics pipelines; anomaly detection on slip distributions; automated work-order generation.
- Assumptions/dependencies: Stable operating conditions to learn baselines; instrumentation for device health tracking.
- Task-aware slip planning and compliance control
- Sector: advanced robotics.
- Use case: Plan motions that intentionally leverage controlled slip (e.g., precision placement by micro-sliding) using predicted slip vectors as feedback.
- Tools/products/workflows: Model-predictive controllers with slip-state inputs; libraries of “controlled slip” primitives.
- Assumptions/dependencies: Higher-fidelity slip models and lower-latency inference (<100 ms) for fast tasks.
Notes across applications:
- The paper’s multi-channel design is key to resolving direction ambiguity (up to 64% reduction in directional error vs. single mic), favoring 4-mic configurations.
- Current model estimates planar slip only and uses ~200 ms windows; high-speed tasks or rotational slip require architectural extensions and shorter, possibly streaming windows.
- Finetuning without external mocap will benefit from self-supervised labeling strategies or proxy sensors.
- Extremely smooth/compliant objects may produce weak structure-borne signals; texturing pads, multimodal fusion, or adaptive gains can mitigate this.
Glossary
- A-SLIP: An acoustic sensing system and model for estimating continuous in-hand slip direction and magnitude on a robot gripper. "We present A-SLIP, a multi-channel acoustic sensing system integrated into a parallel-jaw gripper for estimating continuous slip in the grasp plane."
- active sensing: A sensing mode that emits a probing signal and analyzes the response to infer properties. "while active sensing emits a probing signal and analyzes the response"
- airborne acoustics: Sounds transmitted through air, typically corresponding to human-audible interaction cues. "airborne acoustics captures sounds transmitted through air, typically corresponding to human-audible interaction cues such as pouring"
- asperities: Microscopic surface roughness features that interact under friction to generate vibrations. "friction and surface asperities generate structure-borne vibrations"
- binary cross-entropy loss: A loss function for binary classification used here to supervise slip presence. "We supervise slip presence with a binary cross-entropy loss"
- capacitive tactile sensor arrays: Tactile sensors that infer contact by measuring changes in capacitance across an array. "Capacitive and resistive tactile sensor arrays offer spatially resolved pressure measurements"
- channel attention: A mechanism that learns per-channel weights to fuse multi-microphone inputs. "A learnable channel attention mechanism first fuses the multi-microphone streams"
- closed-loop reactive control: Control that continuously uses sensor feedback to adjust actions in real time. "We further evaluate A-SLIP in closed-loop reactive control"
- cosine similarity loss: A loss that encourages alignment between predicted and ground-truth direction vectors. "We supervise slip direction with a cosine similarity loss"
- creep: Time-dependent deformation in soft materials that can distort sensor readings. "soft sensor phenomena such as creep and hysteresis"
- data acquisition mixer: Hardware that synchronizes multiple audio channels for recording. "to an external data acquisition mixer that synchronizes multi-channel audio"
- DIGIT: A vision-based tactile sensor that uses a camera under a compliant gel to capture contact geometry. "Vision-based tactile sensors such as GelSight and DIGIT embed cameras beneath a deformable gel surface"
- force-torque sensors: Sensors that measure the 6D forces and torques at an interface. "Wrist-mounted force-torque sensors can detect the onset of slip"
- GelSight: A vision-based tactile sensor providing high-resolution contact geometry via an internal camera and gel. "Vision-based tactile sensors such as GelSight and DIGIT embed cameras beneath a deformable gel surface"
- grasp plane: The plane defined by the contacting gripper fingers in which slip is estimated. "for estimating continuous slip in the grasp plane"
- Huber loss: A robust regression loss combining L1 and L2 behavior, used for slip magnitude. "We supervise slip magnitude with a Huber loss"
- hysteresis: Path-dependent behavior where output depends on history, affecting repeatability in soft sensors. "soft sensor phenomena such as creep and hysteresis"
- in-hand manipulation: Manipulating an object while it remains grasped, requiring stable contact and slip estimation. "Reliable in-hand manipulation requires a robot to maintain stable and controlled contact"
- log-mel spectrograms: Time–frequency audio representations using the mel scale and log magnitude. "The A-SLIP model processes synchronized multi-channel audio as log-mel spectrograms"
- mean absolute directional error: The average absolute angular error between predicted and true slip directions. "achieves a mean absolute directional error of 14.1 degrees"
- mel-frequency bins: Discrete frequency bands on the mel scale used in spectrograms. "M is the number of mel-frequency bins"
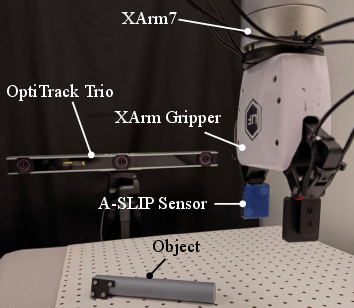
- motion capture: External tracking that measures precise 3D poses to label slip direction and magnitude. "we use a motion capture system to automatically obtain slip direction and magnitude labels"
- multimodal tactile sensors: Sensors that combine multiple sensing modalities to enrich contact information. "Multimodal tactile sensors combine sensing modalities to extract more comprehensive information from physical interactions"
- OptiTrack Trio: A specific motion capture system used for tracking gripper and object poses. "we use an OptiTrack Trio to track poses of the left finger and the object"
- parallel-jaw gripper: A two-finger gripper whose jaws move in parallel for grasping. "integrated into a parallel-jaw gripper"
- passive sensing: A sensing mode that listens to naturally occurring signals without emitting probes. "Passive sensing listens to naturally occurring signals during interaction"
- piezoelectric microphones: Sensors that convert mechanical vibrations into electrical signals via the piezoelectric effect. "The A-SLIP sensor consists of piezoelectric microphones positioned behind a textured silicone contact pad"
- planar slip vector: A 2D vector in the grasp plane encoding slip direction and magnitude. "a continuous planar slip vector that jointly encodes slip event, direction, and magnitude"
- platinum-cure liquid silicone rubber: A two-part silicone material (platinum-catalyzed) used for durable contact pads. "a two-part platinum-cure liquid silicone rubber (Shore 30A)"
- RMSE (root mean squared error): A regression metric measuring the square-root of the mean of squared errors. "Slip magnitude RMSE (Mag. RMSE)"
- self-supervised approaches: Learning methods that derive supervision from the data itself to reduce labeling needs. "self-supervised approaches that reduce labeling requirements"
- shear: Tangential force component at the contact surface that indicates slip. "infer slip from shear and pressure redistribution patterns"
- Shore 30A: A hardness rating on the Shore A scale indicating silicone firmness. "(Shore 30A)"
- slip direction: The orientation of relative motion between gripper and object within the grasp plane. "do not address the estimation of slip direction or magnitude"
- slip magnitude: The intensity or speed of slip, often measured as the norm of the slip vector. "Slip magnitude RMSE (Mag. RMSE)"
- SpecAugment: An audio data augmentation technique that masks time and frequency regions in spectrograms. "SpecAugment-style time and frequency masking"
- structure-borne acoustics: Mechanical vibrations transmitted through solid structures that encode contact events. "structure-borne acoustics captures mechanical vibrations transmitted through rigid bodies"
- temporal attention pooling: An attention mechanism that aggregates temporal features into a fixed-length representation. "A temporal attention pooling module aggregates features"
- temporal convolution: 1D convolution across time used to model dynamics in sequences. "Subsequent 1D temporal convolution layers capture short-term dynamics"
- temporal smoothness regularizer: A loss term that penalizes abrupt changes over time in predicted directions. "We further include a temporal smoothness regularizer that penalizes large angular deviations"
- textured silicone contact pad: A silicone surface with designed textures to induce direction-informative vibrations during slip. "piezoelectric microphones positioned behind a textured silicone contact pad"
- wrench: The combined 6D vector of forces and torques measured at a contact. "observing changes in the measured wrench"
- YCB dataset: A standard set of everyday objects used for benchmarking manipulation research. "four from the YCB dataset"
Collections
Sign up for free to add this paper to one or more collections.