- The paper reframes cross-domain object detection as a stage-coupled problem, emphasizing intertwined challenges in proposal coverage, feature discriminativity, and calibration.
- The paper decomposes CDOD methods along six axes, revealing gaps in alignment, open-set adaptation, and the limitations of current evaluation metrics like mAP.
- The paper highlights practical pitfalls such as rare-class collapse and localization drift, and advocates for stage-wise diagnostics and causal modeling for robust deployment.
Cross-Domain Object Detection: Progress, Pitfalls, and Challenges
Introduction
This survey provides a rigorous analysis of cross-domain object detection (CDOD), contextualizing the task as a stage-coupled optimization problem characterized by the intertwined requirements of proposal coverage, feature discriminativity, and calibration under domain shift. Unlike classification, object detection models must infer both what (semantic class) and where (spatial location), making adaptation inherently more complex. The review addresses the fragmentation in the literature, where methods are often benchmark-centric and lack unified analysis, leading to ambiguity in interpreting CDOD progress.
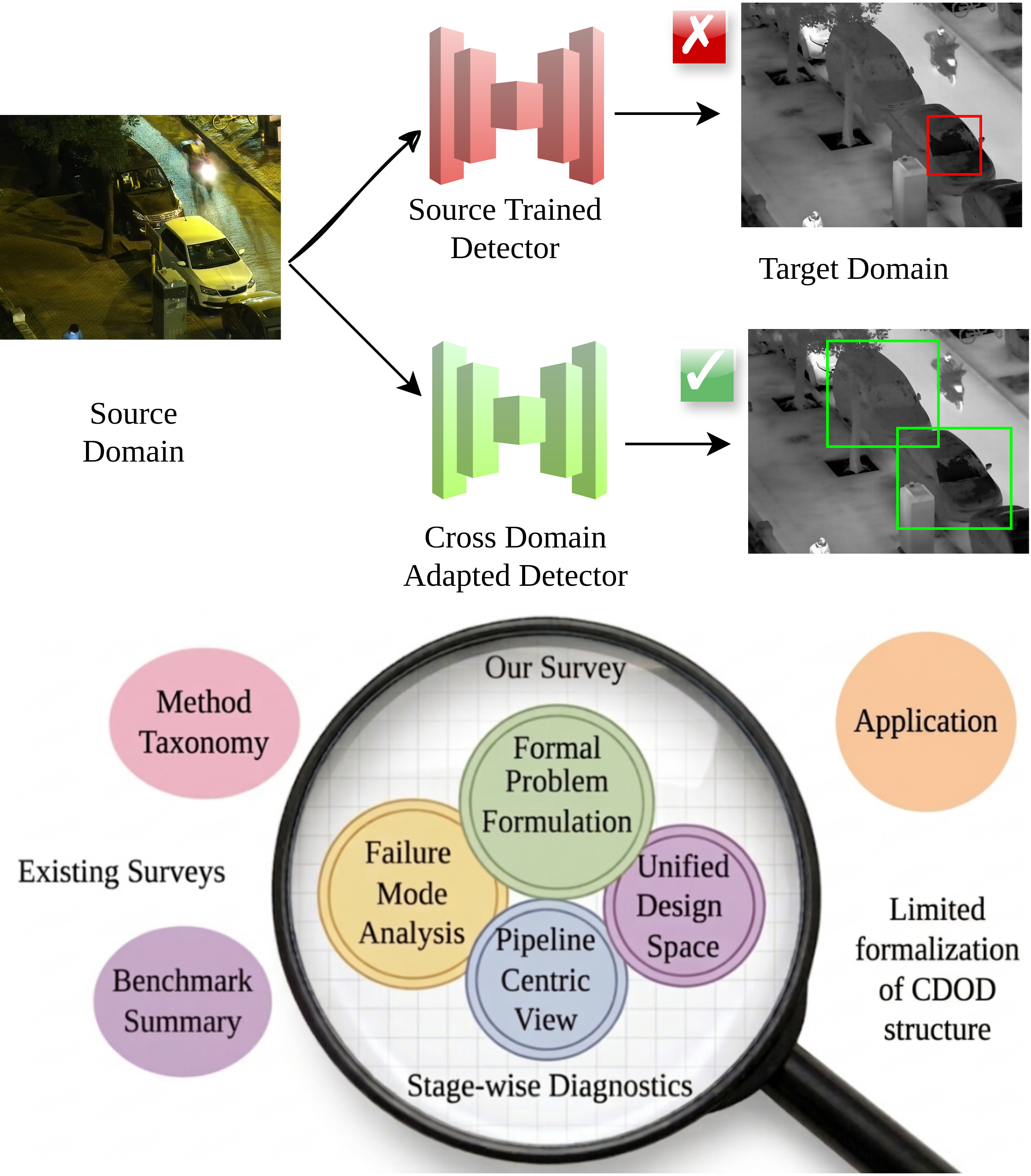
Figure 1: The survey motivation: traditional detectors degrade under domain shift; previous surveys focus mainly on taxonomy, whereas this work synthesizes four complementary pillars—formal formulation, pipeline analysis, failure analysis, and unified design with diagnostic tools.
Theoretical Framework for Cross-Domain Object Detection
CDOD is defined as minimizing the expected detection risk on a target distribution while maintaining three coupled invariants:
- Proposal Coverage: Ensures that target proposals retain recall comparable to the source.
- Feature Discriminativity: The latent representation must support foreground/background and inter-class separability (e.g., preserved Fisher ratio).
- Calibration: Maintains well-aligned confidence scores (low ECE).
The challenge is the recursive dependency between detection stages: domain shift in features alters proposal distribution, adversely affecting subsequent head modules and overall recall, with downstream modules incapable of recovering missed proposals. Unlike classification, where DA theory (e.g., Ben-David's error bounds) is defined over fixed input-output mappings, in detection, the proposal distribution is endogenous and output assignment is non-decomposable.
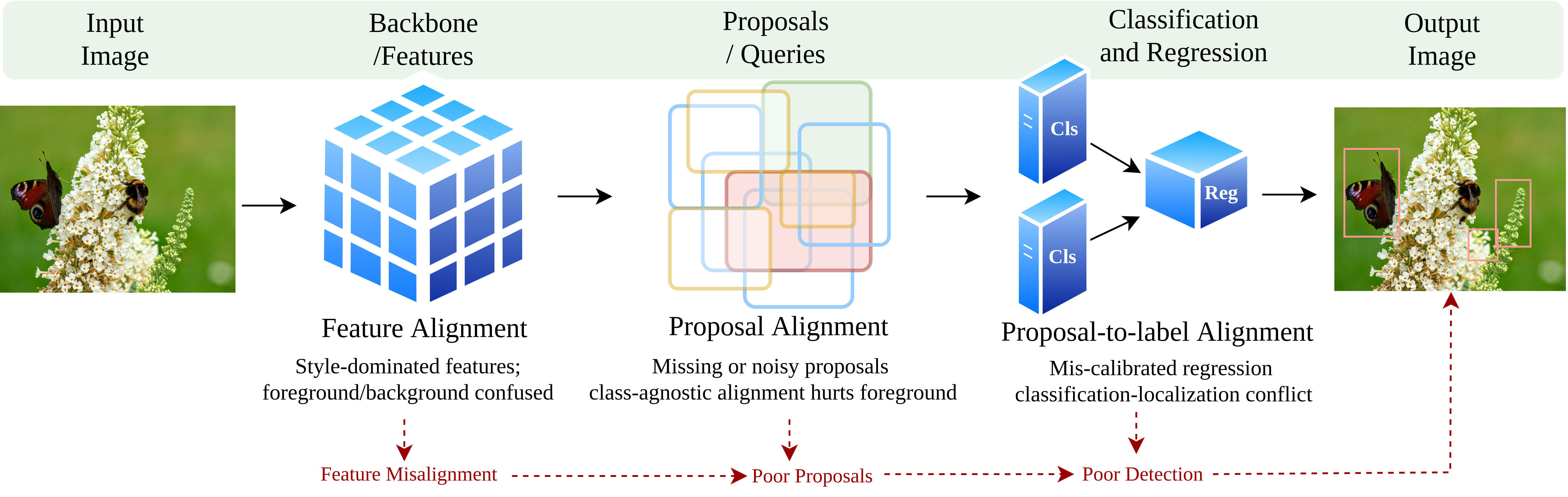
Figure 2: Detection pipeline misalignments—feature, proposal, and proposal-to-label—propagate, inducing compounded degradation in target performance.
Probabilistic Decomposition and Failure Propagation
The survey formalizes the detection process as
PT(y∣x)=∫PT(y∣b,x)PT(b∣x)db,
showing that errors in PT(b∣x) (proposal recall) cannot be rectified by adaptation solely at the detection head. Thus, cross-domain adaptation objectives are forcibly stage-coupled; improvements at any stage influence data distribution for the subsequent steps, often resulting in unpredictable failures if not jointly optimized.
Taxonomy and Analytical Decomposition
Six orthogonal axes are used to decompose and systematize CDOD approaches:
- Alignment / Invariance / Robustness Paradigms: Alignment reduces inter-domain discrepancies; invariance targets causal/statistical stability; robustness-based approaches aim for deployment-readiness via domain generalization.
- Geometry vs. Semantic Preservation: Methods may emphasize geometric consistency (e.g., regression stability, aspect ratios) or semantic transfer (category separation).
- Implicit vs. Explicit Distribution Modeling: Implicit optimization (adversarial, consistency) dominates; explicit probabilistic modeling (prototypes, Gaussian) remains underutilized.
- Instance- vs. Scene-Level: Foreground-centric versus global alignment, with corresponding failure modes linked to proposal quality and context sensitivity.
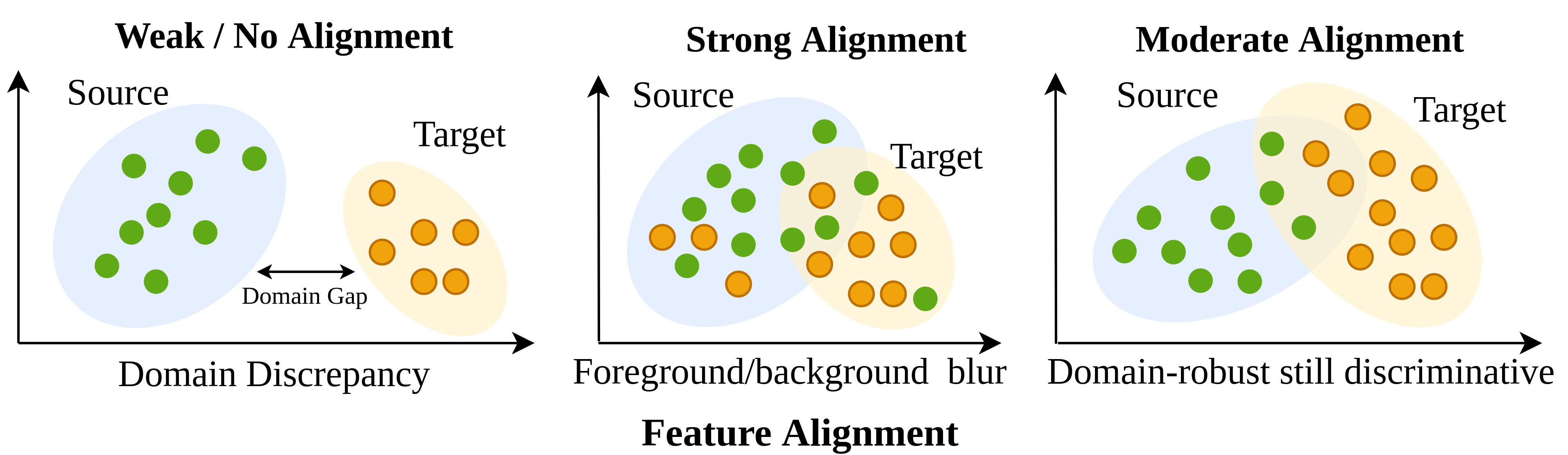
Figure 3: Alignment-discriminativity tension—excessive alignment collapses task-relevant feature geometry, while moderate alignment optimizes task transfer.
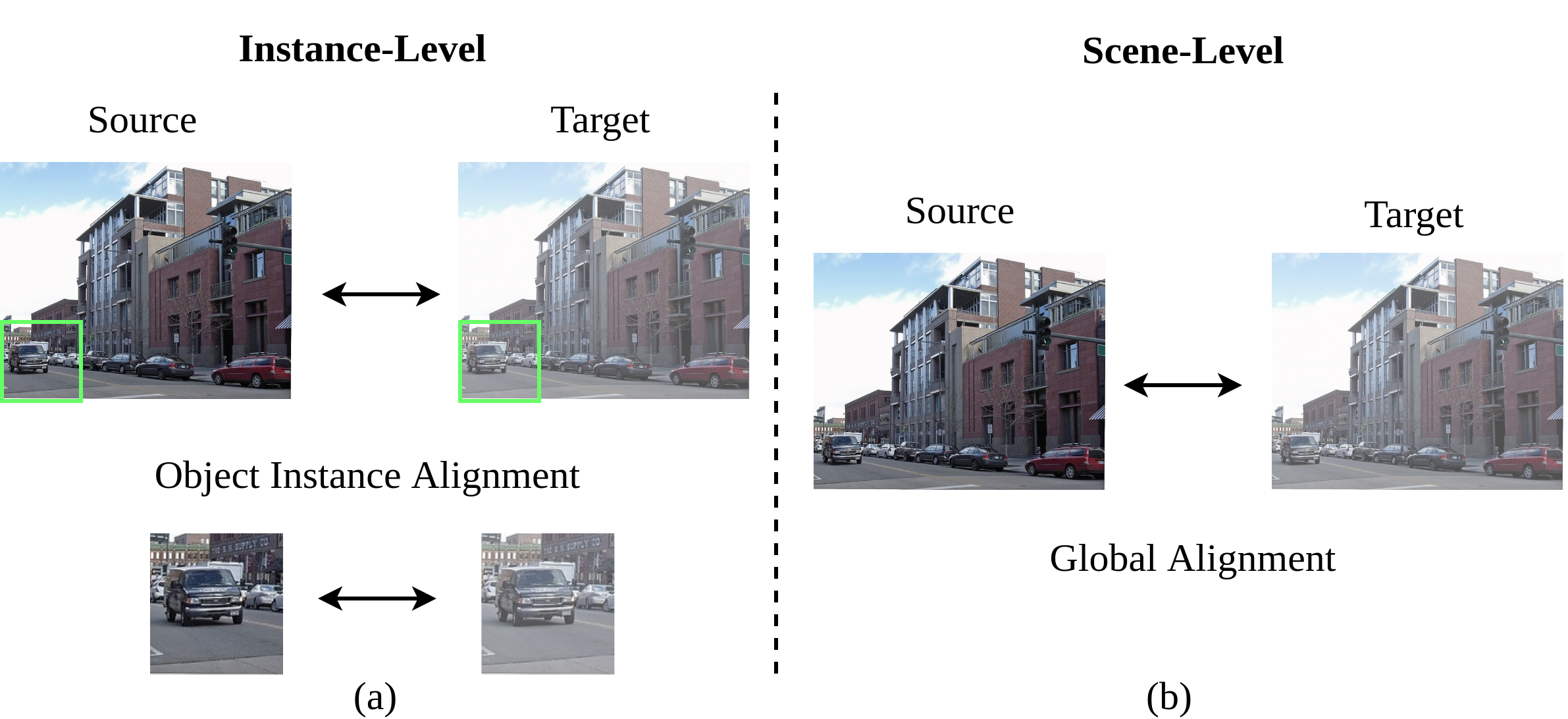
Figure 4: Instance-level versus scene-level adaptation, elucidating pipeline stages targeted: localized features versus global context.
- Closed/Open/Universal Shift: Most methods assume closed-set; open/universal adaptation is underexplored, despite practical relevance for unknown or shifting categories.
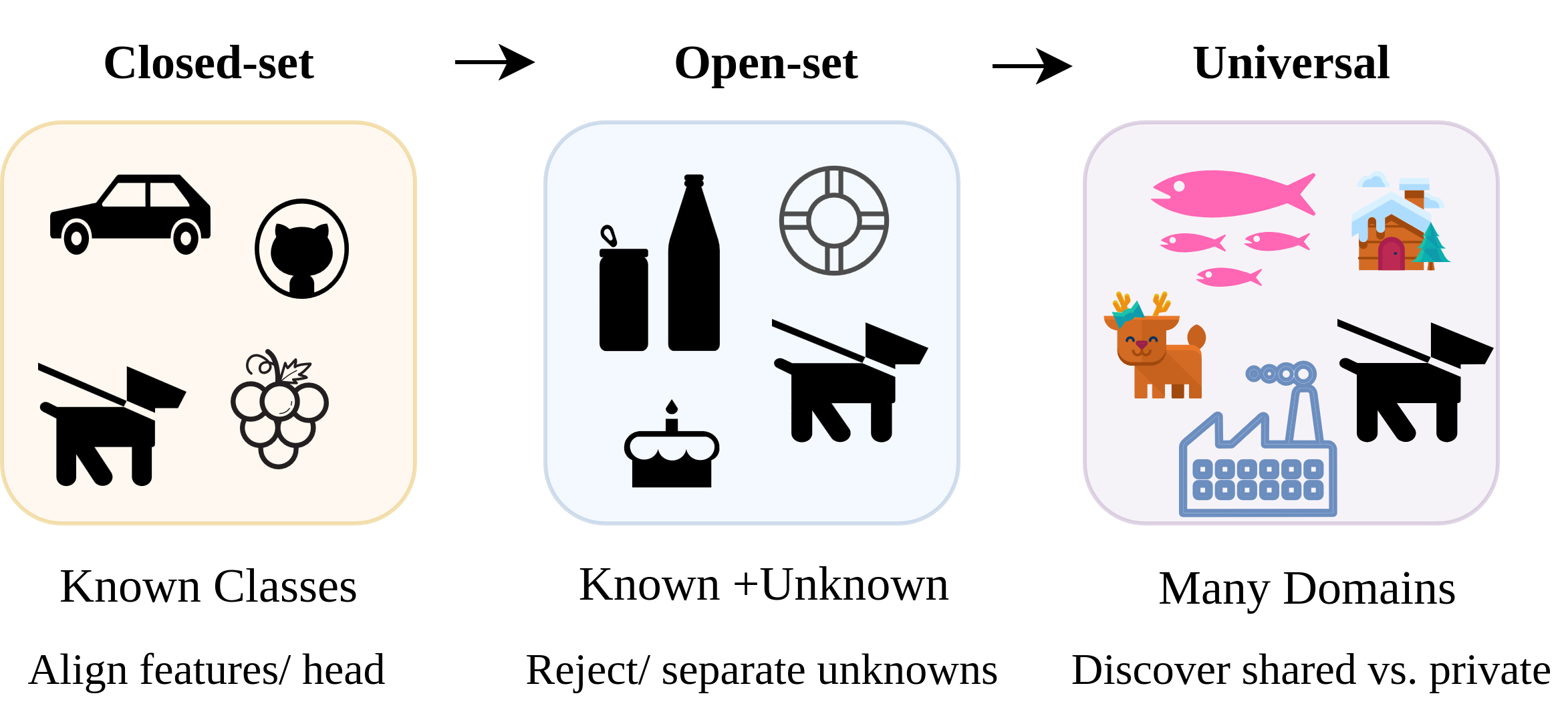
Figure 5: Progression from closed-set to universal shift—benchmarks and methods rarely address the latter, resulting in fragility under real deployment.
- Causal/Correlational Adaptation: Causal invariance, though conceptually promising, is rarely instantiated due to challenges in model identification and intervention.
Failure Mode Analysis and Empirical Deficiency
The empirical landscape reveals several persistent failure modes:
- Alignment-centric Fragility: Methods based on adversarial alignment consistently exhibit rare-class collapse, as majority classes dominate discriminator gradients [Chen et al., 2018; Zhu et al., 2019].
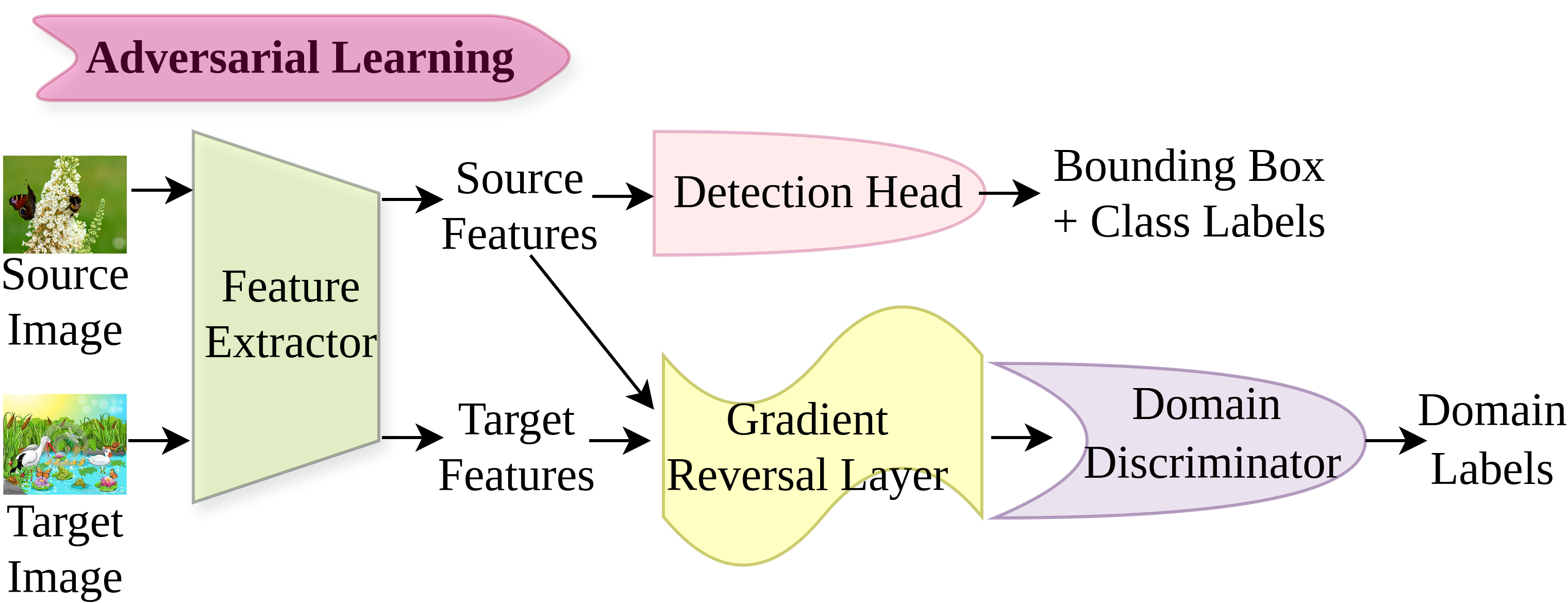
Figure 6: Adversarial adaptation aligns marginal feature distributions, but collapses rare-class structure due to gradient dominance by common classes.
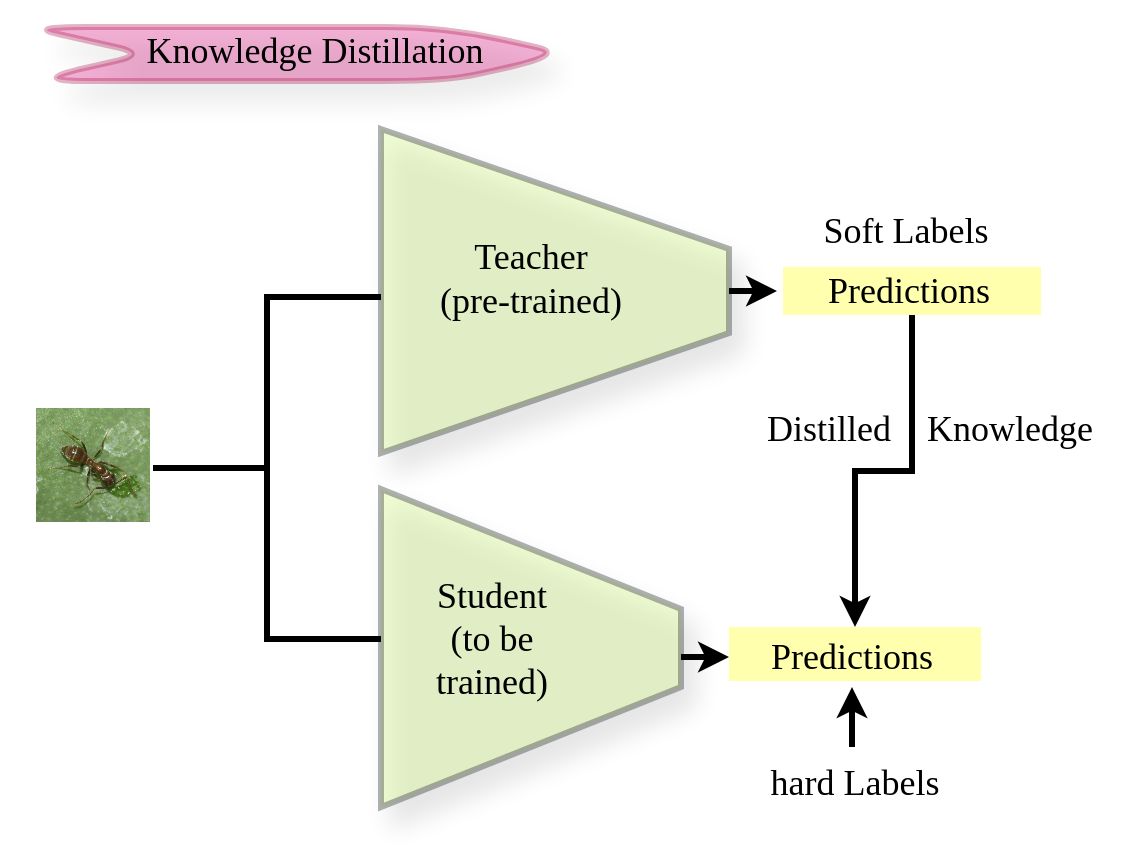
- Self-Training Collapse: Pseudo-labeling amplifies model bias and confirmation errors, particularly when calibration degrades under target shift.
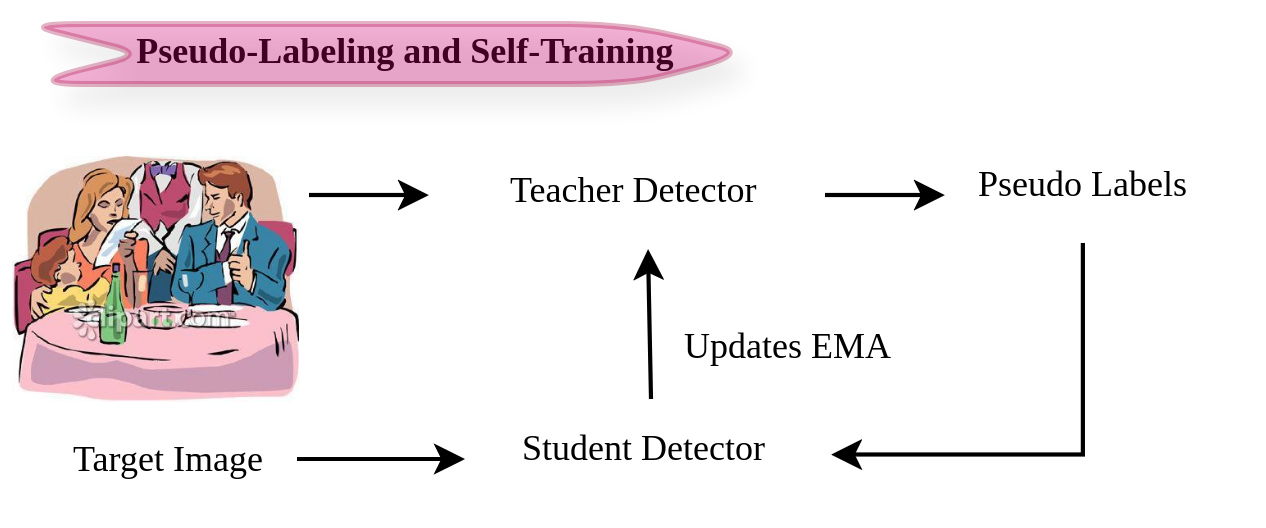
Figure 7: Pseudo-label self-training—a teacher generates target pseudo-labels, resulting in confirmation bias and error reinforcement if calibration is poor.
- Localization/Classification Entanglement: Alignment primarily improves classification but incurs localization drift, a trade-off that is rarely measured due to overreliance on aggregate mAP.
- Open-set Vulnerability: Most CDOD methods misclassify target-private categories or suppress them as background, leading to negative transfer.
- Proposal Instability and Background Over-alignment: The proposal generator, calibrated on source, suffers recall loss on target, compounding downstream head failure. Scene-level alignment overfits to dominant background statistics, erasing fragile foreground discriminativity.
- Metric Myopia: Dominance of mAP conceals which pipeline component fails, impeding progress on composability and robust design.
Datasets and Evaluation Protocols
Major benchmarks (e.g., Cityscapes → Foggy Cityscapes, SIM10K → Cityscapes, COCO → BDD100K) are curated for specific shift types (weather, synthetic-to-real), but rarely address complex or universal domain shifts (e.g., context reconfiguration, open-label). Critically, these datasets support the current overemphasis on explicit feature alignment with controlled shift, whereas long-tail, context, and annotation biases in real deployment remain insufficiently tested.
Future Directions
The review identifies several research gaps, each with actionable open problems:
Conclusion
This survey reframes CDOD as a stage-coupled optimization problem, highlighting that proposal coverage, feature discriminativity, and calibration must be preserved together. The review demonstrates that most literature is concentrated in a narrow region of the design space—alignment-based, closed-set, implicit, scene- or instance-level, correlational methods—leaving significant empirical and theoretical gaps. Robust adaptation and credible progress require explicit tracking of pipeline invariants, multi-domain diagnostics, and methodological expansion into compositional, data-centric, and causally-motivated paradigms. By synthesizing taxonomy, structural analysis, and diagnostic evaluation, this work provides an actionable foundation for future CDOD research and practical deployment (2604.08230).