- The paper introduces Neural Assistive Impulses (NAI), a hybrid analytical-neural approach to synthesize exaggerated motions via momentum-space control.
- It decouples assistive control into an analytical inverse dynamics stream and a closed-loop neural residual impulse policy to robustly track kinematic targets.
- NAI achieves 100% success in challenging maneuvers while reducing tracking error and ensuring dynamic stability in simulations.
Motivation and Context
Standard DRL-based physics simulation methods for articulated characters have achieved robust motion imitation and dynamic behaviors, but replicating exaggerated, non-physical, or "anime-inspired" motions remains infeasible. This limitation originates from the underactuated floating-base structure of characters and the strict adherence to Newtonian dynamics, which preclude mid-air dashes, instantaneous velocity changes, or gravity-defying maneuvers by construction. Pure force injection as external assists is numerically unstable for DRL due to high-frequency, unbounded force spikes, leading to optimization pathologies and learning collapse. The work "Neural Assistive Impulses: Synthesizing Exaggerated Motions for Physics-based Characters" (2604.05394) introduces a momentum-space neural control framework—Neural Assistive Impulses (NAI)—addressing these challenges via hybrid analytical-neural dynamics, closed-loop feedback, and rigorous regularization.
Hybrid Dynamics Architecture
The NAI method decouples the assistive control problem into two parallel streams:
- Analytical Stream: Employs the Recursive Newton-Euler Algorithm (RNEA) to compute the analytically optimal feedforward assistive impulse (Impulse Reference) from kinematic motion targets, treating the character as fully actuated. This serves as a physically grounded open-loop baseline.
- Neural Stream: Implements a closed-loop neural control policy, which observes the simulation state and target references, and predicts a residual impulse to compensate for analytical-model/simulation discrepancies. A learned gating function dynamically fuses analytic and neural channels, yielding the total assistive wrench applied to the character's root.

Figure 1: Overview of the hybrid architecture, splitting control into analytical (top) and neural (bottom) streams, fused via a confidence-aware gate to robustly track exaggerated motions in simulation.
This architecture overcomes the intractability of time-continuous force tracking by transforming the optimization target from instantaneous force (with spikes of magnitude inversely proportional to timestep, leading to spectral bias and optimization instability) to bounded momentum transfer.
Momentum-Space Control and Learning Targets
Pure force-space methods produce action spaces with pathological high-frequency characteristics. The NAI framework reformulates assistive control in momentum space (impulse), providing a frequency-invariant and bounded learning target for policy optimization.
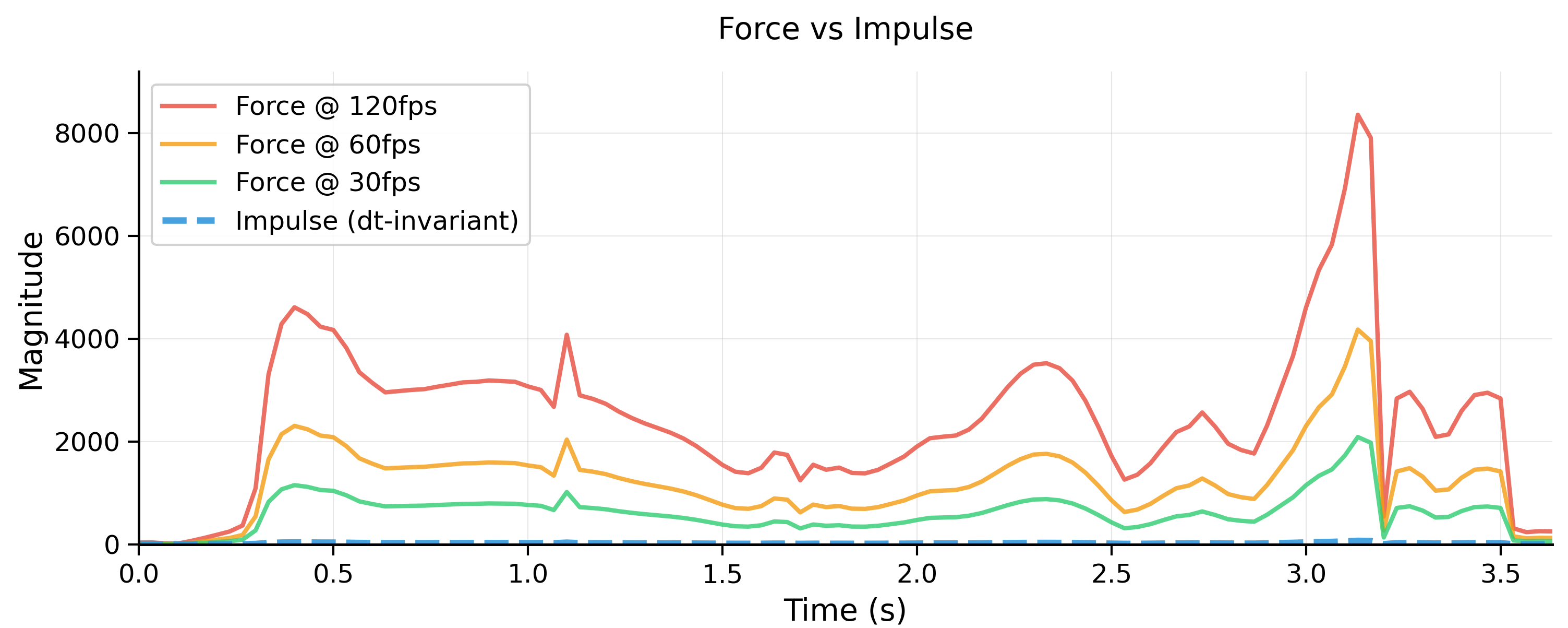
Figure 2: The impulse domain exhibits regular, bounded, and smooth profiles compared to force-space, which suffers from extreme magnitude spikes dependent on simulation timestep.
Analytically, the assistive wrench required for reference tracking is derived via inverse dynamics. The distribution of actuation between internal torques, ground contacts, and assistive wrenches resolves to a QP at each timestep, with the solution projected into impulse space via temporal integration. This baseline is insufficient in practice because open-loop replay accumulates error and does not account for runtime perturbations or state drift (as confirmed in later analyses).
Closed-loop Neural Residual Impulse Control
To address the sim-to-model mismatch and temporal desynchronization intrinsic to open-loop inverse dynamics, the NAI framework introduces a closed-loop neural policy. The policy receives state observations (including signed-log encoded impulse histories to address numerical dynamic range issues), and outputs both joint commands and a direction-magnitude-parameterized residual impulse. These are combined with the analytical baseline via a dual-gated block structure, with separate gates for linear and angular domains.
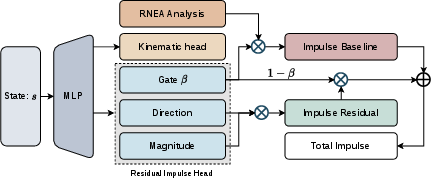
Figure 3: Architecture of the NAI policy network, integrating proprioceptive features with impulse/action output branches and dual gating.
The residual impulse is optimized by a composite objective, which includes a Shadow Compass loss (directional alignment with the analytic baseline) and an Intervention Sparsity loss (penalizing unnecessary assistive activation), in addition to the main PPO imitation loss.
Quantitative and Qualitative Results
Baseline comparisons demonstrate that standard underactuated policies (AMP, ADD) fail categorically—0% success rate—at complex exaggerated maneuvers, while NAI achieves 100% across all challenging test cases. Quantitative evaluation of tracking error, velocity error, impulse magnitude, and jitter confirms that NAI attains high-fidelity trajectories with strict minimization of unphysical intervention, outperforming naive brute-force assistive policies in terms of stability and visual coherence.
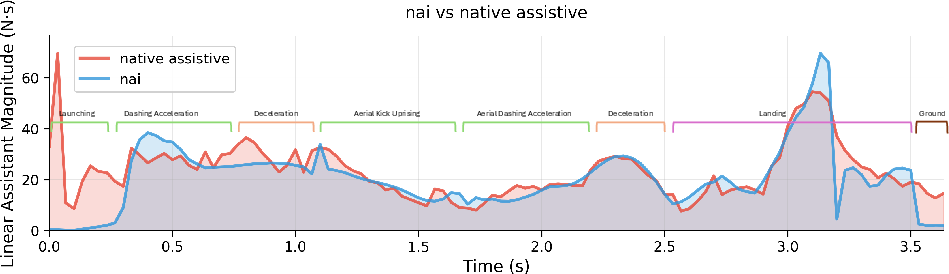
Figure 4: NAI (blue) demonstrates sparse, targeted impulse activation, unlike native residual approaches (red) that inject continuous high-frequency assistive force.
Pure analytical replay accumulates monotonic numerical drift due to open-loop instability. Closed-loop NAI maintains bounded error by dynamically synthesizing corrective residuals in response to simulation divergence and perturbations.
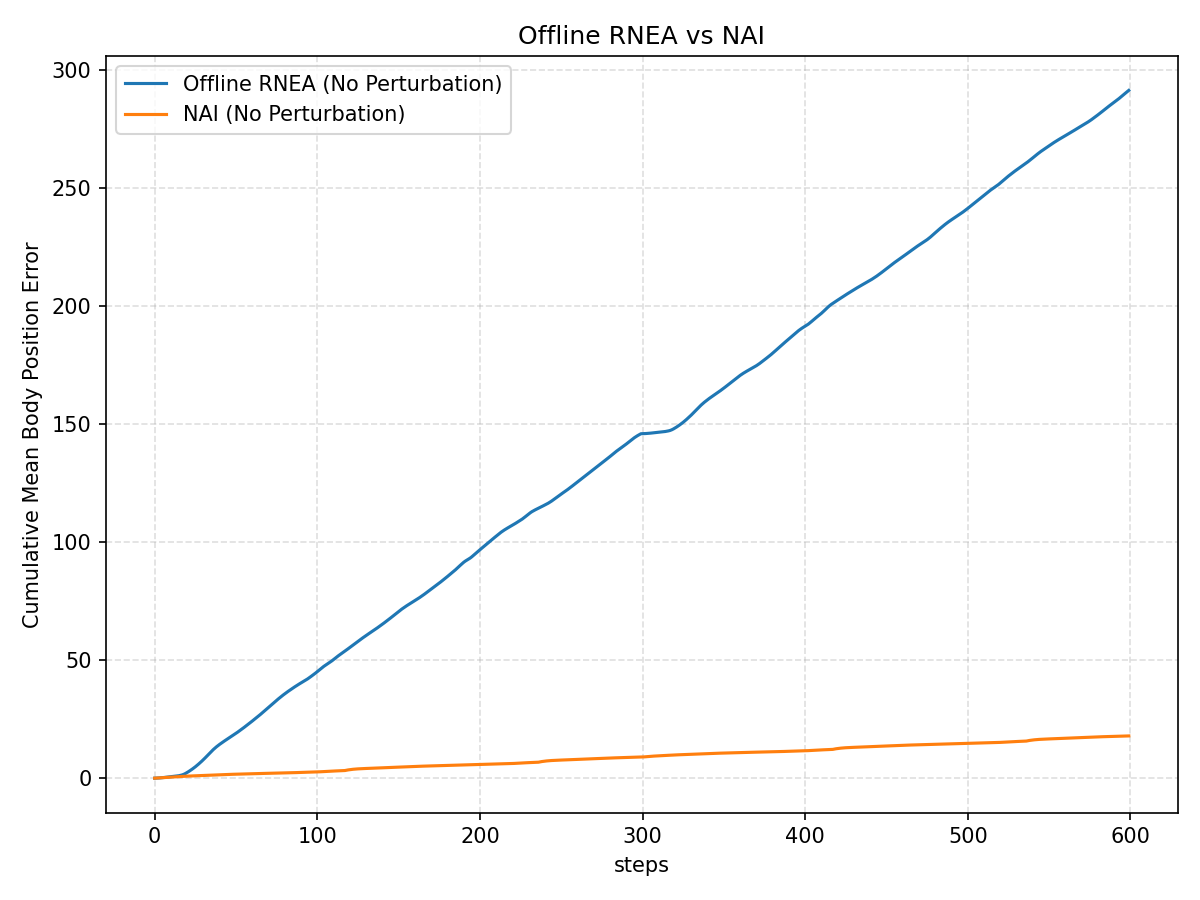
Figure 5: Open-loop analytical RNEA tracking diverges over time; closed-loop NAI maintains bounded error.
Under randomized external perturbations, NAI recovers robustly, with the residual impulse rapidly re-aligning the actor to the target trajectory.
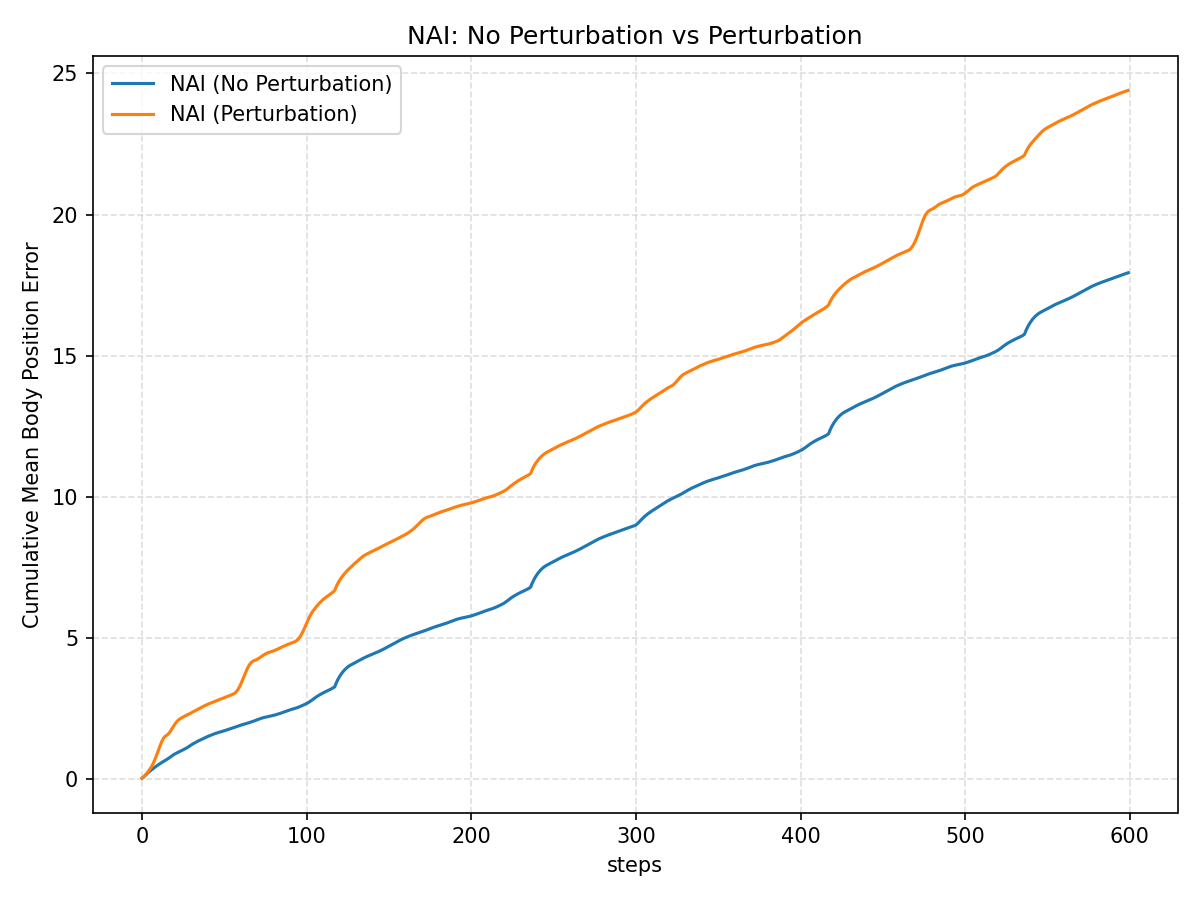
Figure 6: NAI absorbs external impulses and reestablishes nominal tracking, confirming closed-loop robustness.
Visualizations of stylized and exaggerated motion (gravity-defying kicks, dashing aerial combat) validate qualitative realism and creative expressivity enabled by the hybrid dynamics approach.
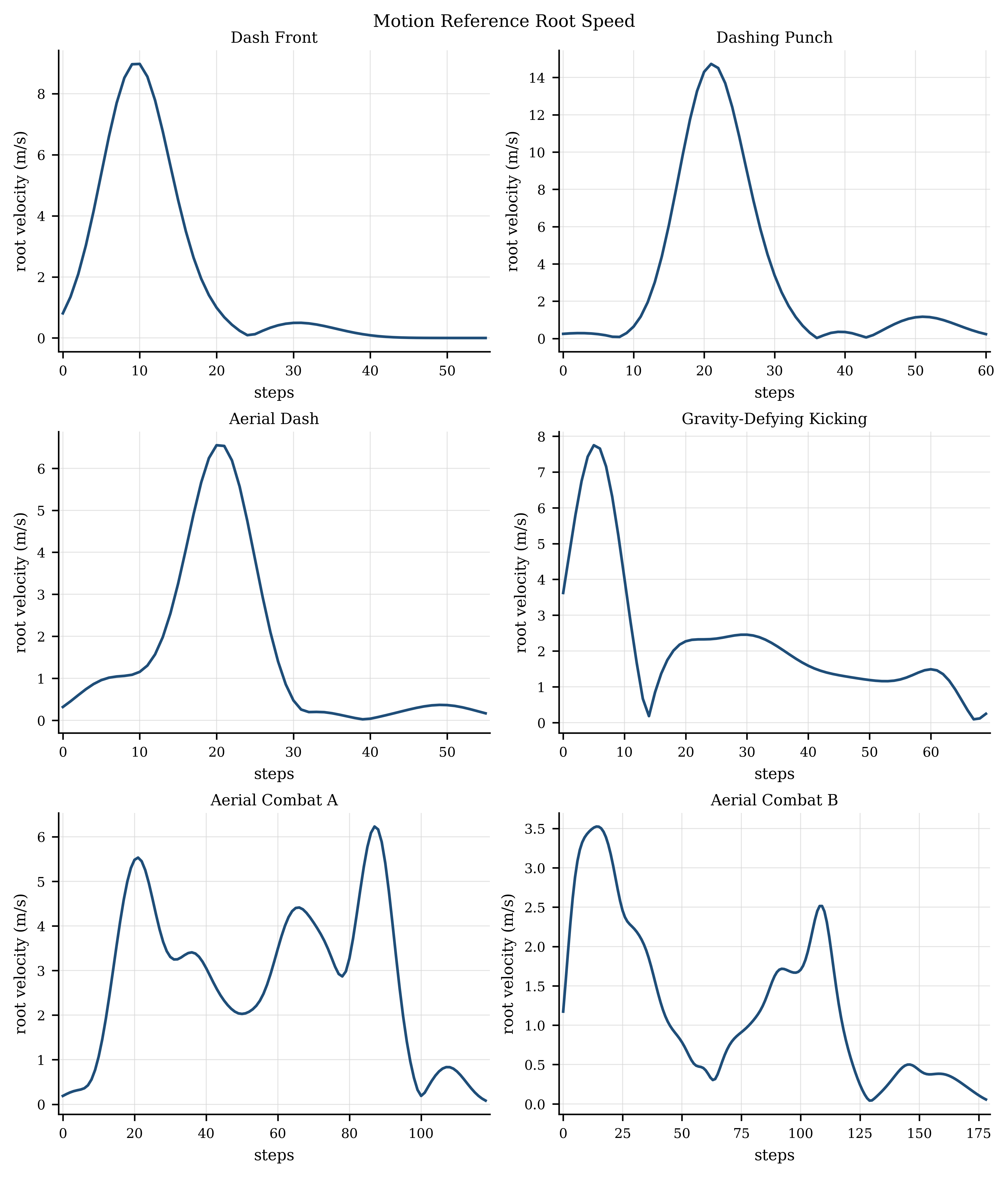
Figure 7: NAI-trained humanoids executing stylized, exaggerated anime-inspired maneuvers.
Ablation and Regularization Study
Ablation studies confirm the necessity of the Shadow Compass loss (for efficient directional exploration) and the Sparsity loss (for numeric regularity and avoidance of persistent, non-physical intervention). Removing either degrades success rate, increases positional error, and exacerbates control signal jitter, sometimes resulting in training collapse.
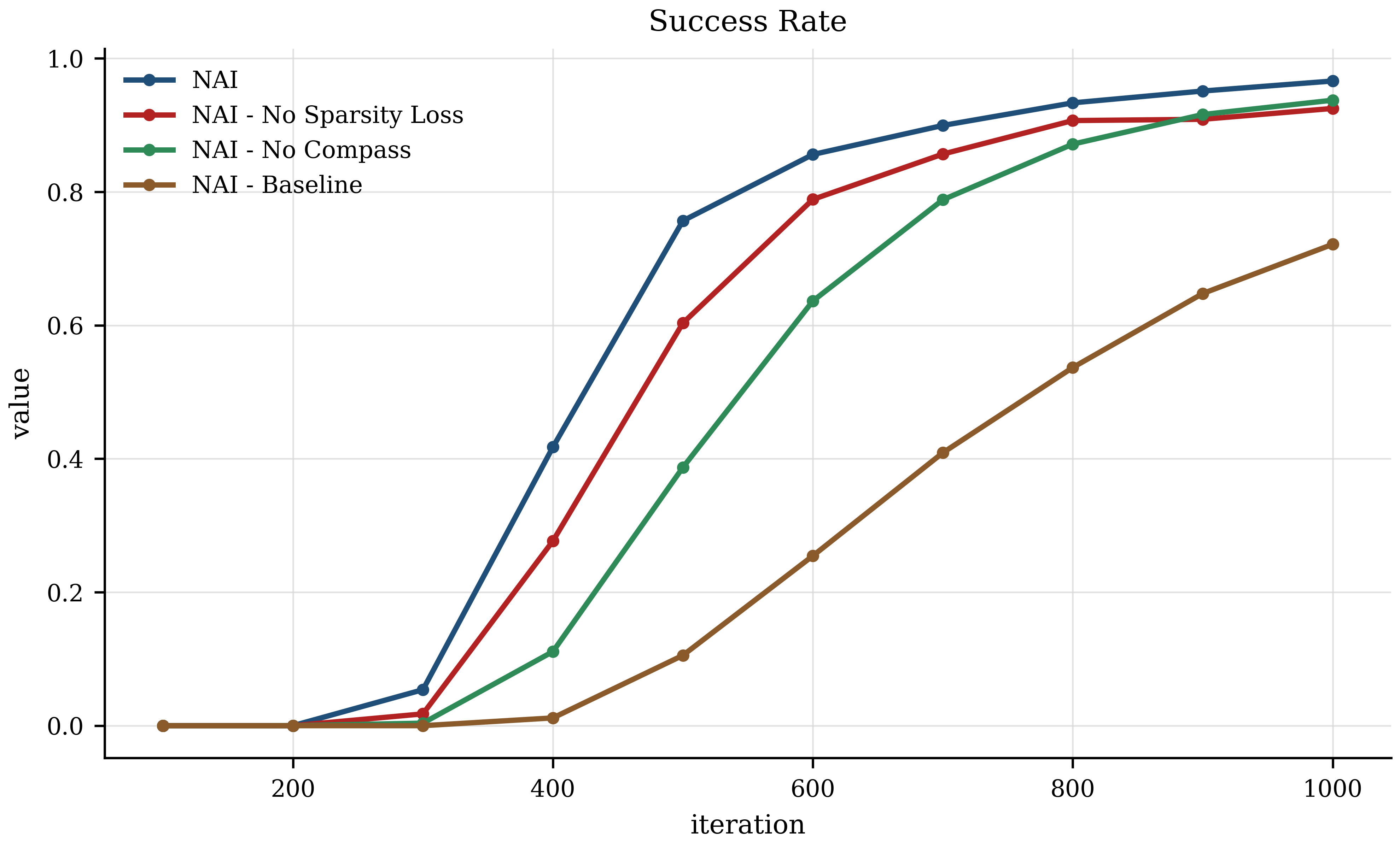
Figure 8: Removing Shadow Compass (green) drastically hinders convergence speed and final success rate; removing Sparsity (red) increases drift and error accumulation.
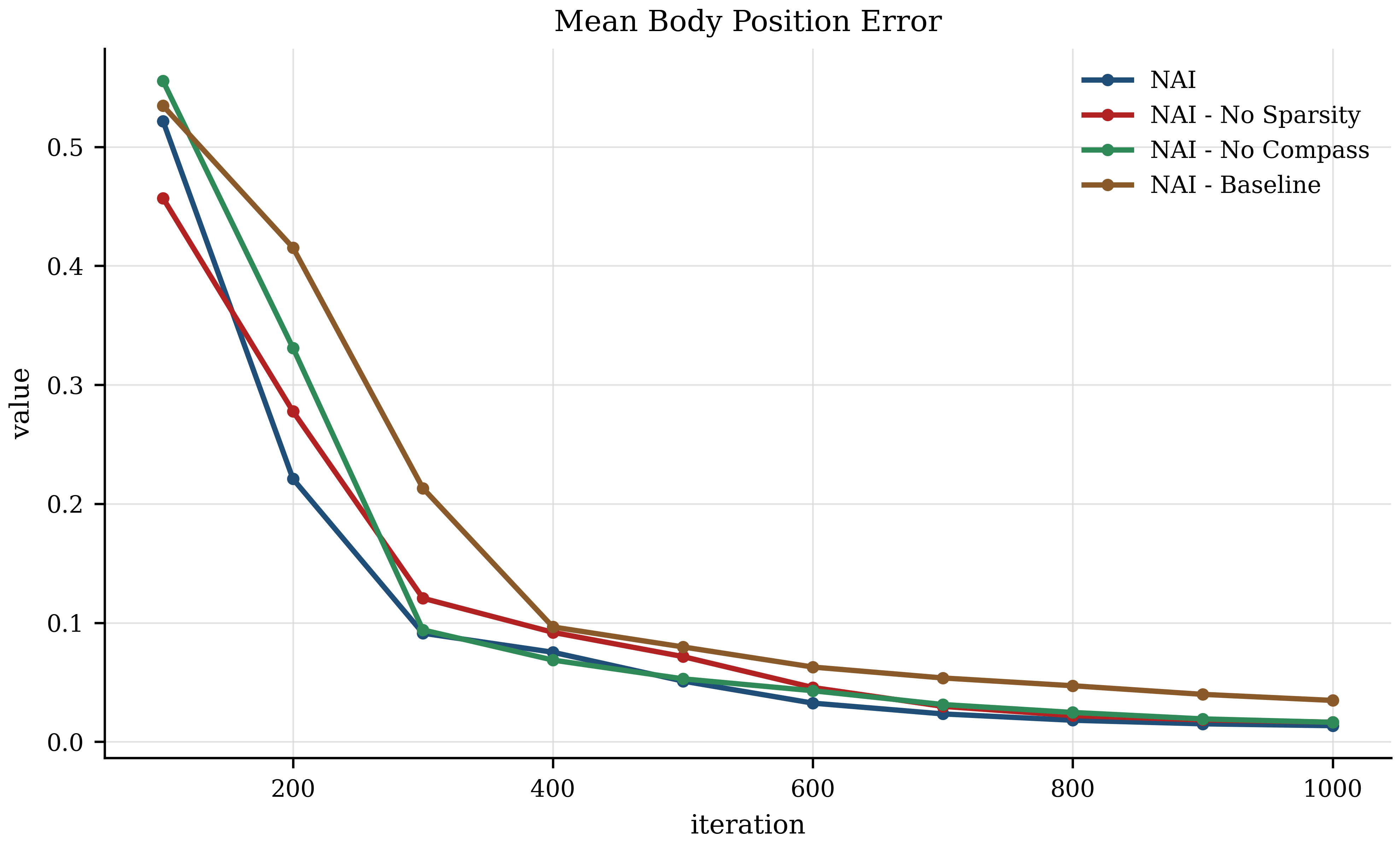
Figure 9: Baseline lacking both regularizations (brown) fails to minimize position error; full NAI achieves lowest error and stable convergence.
Theoretical and Practical Implications
NAI formally demonstrates that robust execution of kinematically invalid (nonphysical) reference motions in a physics-based simulation is only attainable via momentum-space assistive control, enforced via hybrid analytic-neural learning and strict regularization. The physics-informed, closed-loop feedback architecture fundamentally bridges kinematic "imagination" space with the requirements of simulation stability and dynamic plausibility. This framework offers a rigorous physics-constrained mechanism for integrating future generative AI pipelines (e.g., diffusion-based text-to-motion synthesizers) with interactive simulation environments, acting as a "physics adapter" for anchoring speculative or fantastical reference content.
Limitations and Prospects
The main limitation of NAI is the dependency on the fidelity and consistency of the analytic baseline; severe discontinuities or kinematic artifacts in reference data can induce challenging learning regimes for the residual network. Another constraint is that the balance between exact tracking and physical plausibility must be tuned per application. Future extensions will consider seamless integration with generative motion models and extension to complex object-character interactions, including weapons and destructible environments.
Conclusion
The NAI framework establishes a new paradigm for synthesizing highly dynamic, stylized, and even nonphysical motions within a physics-based character simulation pipeline. By employing a hybrid analytic-neural impulse control architecture, augmented by physics-aligned regularization and robust feedback mechanisms, this work offers a scalable, generalizable, and numerically stable solution to the fundamental challenge of bridging artistic intent and physical simulation in high-fidelity animation, opening new avenues for physically consistent, expressive, and robust character control in both interactive and generative contexts (2604.05394).

